蚌埠西门子模块代理商





蚌埠西门子模块代理商
集成安全功能
通过密码进行知识保护,防止未经许可证读取和修改程序块
通过复制保护来提高保护程度,防止未经授权而复制程序块:
通过复制保护,可将 SIMATIC 存储卡上的程序块与其序列号绑定,以便只有在将配置的存储卡插到 CPU 中时,该程序块才可运行。
具有四个不同授权级别的权限:
可向各个用户组分配不同访问权限。通过新的保护级别 4,还可以限制与 HMI 设备之间的通信。
改进了操作保护:
控制器将会检测到组态数据的更改或未授权传输。
用于以太网通信处理器 (CP 1543-1):
通过防火墙提供附加访问保护
建立安全 VPN 连接
设计与操作
配备显示器的 CPU,可显示纯文本信息(因特网上的显示仿真工具):
可显示所有连接模块的订货号、固件版本和序列号信息
直接在现场设置 CPU 的 IP 地址以及进行其它网络设置,无需使用编程设备
直接以普通文本形式显示错误消息,可缩短停机时间
所有模块采用统一的前连接器,并具有用于灵活形成电压组的集成式电压桥接件,从而简化了库存,减少了布
六、PLC输出电路中没有保护,因此应在外部电路中串联使用熔断器等保护装置,防止负载短路造成损坏PLC;
七、 不要将交流电源线接到输入端子上,以免烧坏PLC;
八、接地端子应接地,不与其它设备接地端串联,接地线裁面不小于2mm2;
九、 输入、输出线尽量分开走线,不要与动力线在同一管路内或捆扎在一起,以免出现,产生误;传输线采用屏蔽线,并且将屏蔽线接地;为保证 可靠,输入、输出线一般控制在20米以内;扩展电缆易受噪声电,应远离动力线、高压设备等。
提供有大量功能,支持用户的 S7-1500 编程、调试和维护等工作。性能指令处理速度更快, 取决于 CPU 型号、语言扩展和新的数据类型代码生成得到优化,响应时间显着缩短集成技术通过标准 PLCopen 运动控制块,简便、快速地对运动序列进行编程运动控制功能支持速度西门子CPU1516-3 PN/DP一级代理商控制轴、定位轴、相对同步操作(在没有位置同步规范的条件下实现同步)以及外部编码器、凸轮和探头。CPU 技术中还集成了诸如同步操作(利用位置同步规范进行同步)凸轮系统等扩展的运动控制功能。方便的诊断和调试工具提供了驱动器调试支持向组态系统和人机界面自动发送报警消息:简化故障排除步骤节省了调试时的时间与工作量。等时同步模式将分布式信号采集、信号传输和程序执行与具有恒定总线循环时间的 PROFIBUS 和 PROFINET 的循环进行同步耦合:采集输入信号并进行处理,按固定时间间隔(恒定总线循环时间)将输出信号输出。同时创建了前后*的部分过程图像。由于分布式 I/O 以恒定总线循环时间进行同步信号处理,可实现可重现的确定过程响应时间在分布式自动化解决方案中,SIMATIC S7-1500 还可执行高速处理操作,并可取得*的精度和重现性。这意味着可在提供佳且恒定的质量的同时提高产量。提供了用于完成运动控制、测量值采集、高速控制等复杂任务的全面组件。集成安全功能通过密码进识保护,防止未经授权而读取和修改程序块(与 STEP 7 相结合)通过复制保护来提高保护程度,防止未经授权而复制程序块:通过复制保护,可将 SIMATIC 存储卡上的程序块与其序列号绑定,以便只有在将配置的存储卡插到 CPU 中时,该程序块才可运行。4 级授权方式:可向用户组分配不同访问权限。通过新的保护级别 4,还可以限制与 HMI 设备之间的信。由于操作保护得到改进,控制器可以检测到组态数据的更改或未经允许的传输。设计与操作带集成显示屏的 CPU:可方便地分析集中和分布式模块的状态,或不使用编程设备而设置或更改 IP 地址。系统诊断信息和用户报警在显示屏上以普通文本形式显示,有助于快速有效地响应产生的错误消息。菜单和消息文本在显示屏上可以多种语言显示。集成系统诊断系统诊断信息在显示屏上以纯文本格式持续显示,TIA Portal,HMI 设备和 web 服务器,包括驱动器中的消息,在CPU停止运行的状态下均有可能。此功能是作为一个系统功能集成在 CPU 固件中,无需由用户单独组态。若配置了新硬件组件,则自动更新诊断信息。通过质量信息,直接在用户程序中进行简单快速的诊断:通过激活模块的质量信息 (QI),可直接在用户程序中查询和评估所提供过程值的有效性。此时,访问是通过过程映像并使用简单二进制或加载命令进行的。先决条件是可在 TIA Portal 中对模块进行诊断,并对质量信息进行组态。支持 SIMATIC ProDiag S7-1500 – 用于轻松创建机器诊断与工厂诊断。它提升了可用性,并支持就地的故障分析和故障排除功能。通过 SIMATIC STEP 7Professional V12 组态软件进行组态SIMATIC S7-1500 控制器系列可在TotallyIntegratedAutomationPortal 平台中使用 STEP 7 Professional V12 或更高版本来编程。SIMATIC STEP 7 Professional V12 SIMATIC S7-1500 的直观组态系统。兼容性移植:与 SIMATIC STEP 7 Professional V13 集成的一个移植工具可帮助从 S7300/S7-400 切换到 S7-1500 控制器,并自动转换程序代码。无法自动转换的程序代码将会记录下来,并可以手动进行调整。客户支持页面的下载区域中还以独立工具的形式提供了该移植工具。STEP 7 V11 项目可在兼容模式下继续和 STEP 7 V12 组合使用 。S7-1200 程序也可以通过复制/粘贴手段转移至 S7-1500SIMATIC 存储卡(CPU)SIMATIC 存储卡用作插入式装载存储器,或用于更新固件。STEP 7 项目(包括注释和符号、附加文件或 csv 文件(用于配方和归档))也可存储在 SIM西门子CPU1516-3 PN/DP一级代理商ATIC 存储卡上。过用户程序和 SIMATIC 存储卡上的系统函数来创建数据块,并存储或读取数据。Safety Integrated(S7-1500F 控制器的功能选项)“STEP 7 Safety Advanced"选件包;用于对 S7-1500F 控制器的安全相关程序部分进行编程。选件包中包括所有用来创建 F 程序的所有功能和块。STEP 7 Safety Advanced V12 可在 SIMATIC STEP 7 Professional V12 SP1 下运行
在个实例中,SIMATIC S7-300 用于制造工艺中的创新性系统解决方案,特别是用于汽车工业,一般机械工程,特别是特殊机械制造和机器的连续生产 (OEM),以及塑料加工、包装行业、食品和饮料工业和加工工程
作为一种多用的自动化系统,S7-300 是那些需要灵活的设计以实现集中和本地组态的应用的理想解决方案。
对于由于环境条件限制需要特殊的坚固性的应用,我们可以提供SIPLUS 设备。
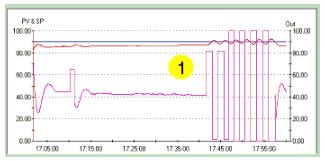
| 本文主讲在s7-200SMART plc中PID的自整定功能和调试面板。 一、PID自整定说明 在新的S7-200SMART CPU支持PID自整定功能,在STEP 7-Micro/WIN SMART编程软件中也添加了PID调节控制面板。用户可以使用用户程序或PID调节控制面板来启动自整定功能。在同一时间多可以有8个PID回路同时进行自整定。PID调节控制面板也可以用来手动调试老版本的(不支持PID自整定)CPU的PID控制回路。用户可以根据工艺要求为调节回路选择快速响应、中速响应、慢速响应或极慢速响应。PID自整定会根据响应类型而计算出优化的比例、积分、微分值,并可应用到控制中。 二、PID调节控制面板 STEP 7-Micro/WIN SMART中提供了一个PID控制面板,可以用图形方式监视PID回路的运行,另外从面板中还可以启动、停止自整定功能。
|