
西门子模块6GK7243-1EX01-0XE0性能参数

西门子模块6GK7243-1EX01-0XE0性能参数
LED是恒流驱动的,只要驱动板可正常工作,供电电压可以一些。电源有下拖形状的限流特性,而不是通常的较陡峭形状的限流特性,以保证有的过载能力、较高的利用率。 考虑到以上各点,提出新的供电方案如下: 1)集中供电,采用n+1冗余方案。 2)电源模块设计适当的输出电流,模块可均流。保证屏体装配工艺易实现n+1冗余。 3)电源模块有下拖形状的限流特性以保证有的过载能力、较高的利用率。 4)电源模块有扁平的外形,自然散热,易于在屏体上安装,并利用屏体散热。 实现了对开关电源的智能控制。设计中采用隔离变压器将市电变压后通过整流滤波送至DC-DC升压变换器,经过一系列的控制整合电路之后可实现设计要求。体框图如图1.1示。1.1 DC-DC主回路拓扑 采用UC3842和MAX4080构成DC-DC转换电路。UC3842是一块功能齐全、较为典型的单端电流型PWM控制集成电路,内包含误差放大器、电流检测比较器、PWM锁存器、振荡器、内部基准电源和欠压锁定等单元。电流控制型升压DC-DC转换电路,外接元器件少、控制灵活、成本低,输出功率容易做到100W以上。
6ES7331-7PF11-4AB2 SM331 扩展模块 (6ES73317PF110AB0) SIMATIC S7-300, 逻辑输入 SM 331, 光学隔离, 8 AI 热电偶, 类型 B, E, J, K, L, N, R, S, T TXK/TXK(L) 根据 GOST 16 BIT, 50 MS, 1 X 40 针和SIMATIC S7-300, 前连接器 传感器模块(6ES73921BM010AA0)
传感器模块6ES7332-5HB01-0AB0 SIMATIC S7-300, 逻辑输出SM 332, 光隔离, 2 AO, U/I; 11/12位 RESOL., 20 针., 移除/ 带有 ACTIVE 背板线
传感器模块6ES7332-5HB01-4AB1 SM332 扩展模块 (6ES73325HB010AB0) SIMATIC S7-300, 逻辑输出 SM 332, 光隔离, 2 AO, U/I; 11/12位 RESOL., 20 针., 移除/ 带有 ACTIVE 背板线和SIMATIC S7-300, 前连接器 (6ES73921AJ000AA0) 用于模块带有
传感器模块6ES7332-5HB01-4AB2 SM332 扩展模块 (6ES73325HB010AB0) SIMATIC S7-300, 逻辑输出 SM 332, 光隔离, 2 AO, U/I; 11/12位 RESOL., 20 针., 移除/ 带有 ACTIVE 背板线和SIMATIC S7-300, 前连接器(6ES73921BJ000AA0) 用于模块带有
西门子PLC S7-300模块 6ES7332-5HD01-0AB0 SIMATIC S7-300, 逻辑输出 SM 332, 光隔离, 4 AO, U/I; 诊断; 分辨率 11/12位, 20针, 移除/ W. ACTIVE, 背板线
西门子PLC S7-300模块6ES7332-5HD01-4AB1 SM332 扩展模块 (6ES73325HD010AB0) SIMATIC S7-300, 逻辑输出 SM 332, 光隔离, 4 AO, U/I; 诊断; 分辨率 11/12位, 20针, 移除/ W. ACTIVE, 背板线和SIMATIC S7-300, 前连接器 (6ES73921AJ000AA0) 用于
西门子PLC S7-300模块6ES7332-5HD01-4AB2 SM332 扩展模块 (6ES73325HD010AB0) SIMATIC S7-300, 逻辑输出 SM 332, 光隔离, 4 AO, U/I; 诊断; 分辨率 11/12位, 20针, 移除/ W. ACTIVE, 背板线和SIMATIC S7-300, 前连接器(6ES73921BJ000AA0) 用于
3D动画演示西门子伺服系统工作原理
(一)PLC是怎么控制伺服电机的?
在回答这个问题之前,首先要清楚伺服电机的用途,相对于普通的电机来说,伺服电机主要用于**定位,因此大家通常所说的控制伺服,其实就是对伺服电机的位置控制。其实,伺服电机还用另外两种工作模式,那就是速度控制和转矩控制,不过应用比较少而已。
速度控制一般都是有变频器实现,用伺服电机做速度控制,一般是用于快速加减速或是速度精准控制的场合,因为相对于变频器,伺服电机可以在几毫米内达到几千转,由于伺服都是闭环的,速度非常稳定。转矩控制主要是 控制伺服电机的输出转矩,同样是因为伺服电机的响应快。应用以上两种控制,可以把伺服驱动器当成变频器,一般都是用模拟量控制。
伺服电机*主要的应用还是定位控制,
位置控制有两个物理量需要控制,那就是速度和位置,确切的说,就是控制伺服电机以多快的速度到达什么地方,并准确的停下。
伺服驱动器通过接收的脉冲频率和数量来控制伺服电机运行的距离和速度。比如,我们约定伺服电机每10000个脉冲转一圈。如果PLC在一分钟内发送10000个脉冲,那么伺服电机就以1r/min的速度走完一圈,如果在一秒钟内发送10000个脉冲,那么伺服电机就以60r/min的速度走完一圈。
所以,
PLC是通过控制发送的脉冲来控制伺服电机的
,用物理方式发送脉冲,也就是使用PLC的晶体管输出是的方式,一般是低端PLC采用这种方式。而中PLC是通过通讯的方式把脉冲的个数和频率传递给伺服驱动器,比如Profibus-DP CANopen,MECHATROLINK-II,EtherCAT等等。这两种方式只是实现的渠道不一样,实质是一样的,对我们编程来说,也是一样的。这也就是我想跟大家说的,要学习原理,触类旁通,而不是为了学习而学习。
对于程序编写,这个差别很大,日系PLC是采用指令的方式,而欧系PLC是采用功能块的形式。但实质是一样的,比如要控制伺服走一个**定位,我们就需要控制PLC的输出通道,脉冲数,脉冲频率,加减速时间,以及需要知道伺服驱动器什么时候定位完成,是否碰到限位等等。无论哪种PLC,无非就是对这几个物理量的控制和运动参数的读取,只是不同PLC实现方法不一样
HMI 设备 MP 277 10" Touch 的设计:
正视图与侧视图

① | 存储卡的插槽 |
② | 显示器/触摸屏 |
③ | 安装夹凹槽 |
④ | 安装密封垫 |

① | 接口 |
② | 安装夹凹槽 |

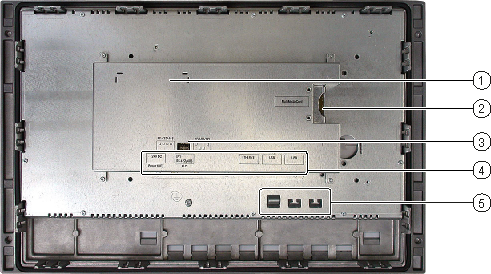
① | 铭牌 |
② | 存储卡的插槽 |
③ | DIP 开关 |
④ | 接口名称 |
⑤ | 用于应力消除的固定元件 |
HMI 设备 MP 277 10" Key 的设计:
正视图与侧视图

① | 存储卡的插槽 |
② | 显示器 |
③ | 安装夹凹槽 |
④ | 安装密封垫 |

① | 接口 |
② | 安装夹凹槽 |
① | 铭牌 |
② | 存储卡的插槽 |
③ | DIP 开关 |
④ | 接口名称 |
⑤ | 用于应力消除的固定元件 |
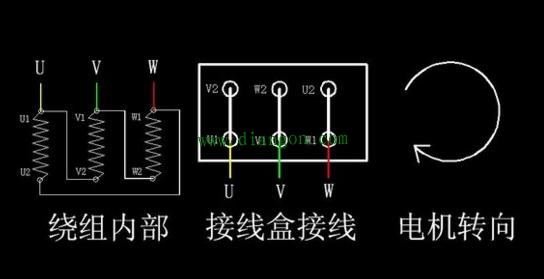
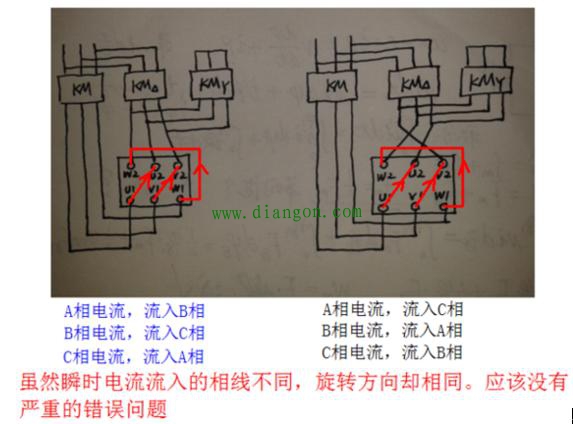
| 星三角启动不管怎样接错线,也不会出现星接正转、角接反转的情况。于是问题转化为:可以接出两种角接的接法,这两种角接转向一致。有认真的师傅用电机亲自接了两种角接试验转向,结果转向一致。看下图,这样接星接、角接转向一致。
|
- 西门子模块6ES7241-1AA22-0XA0性能参数 2024-05-08
- 西门子模块6ES7253-1AA22-0XA0性能参数 2024-05-08
- 西门子模块6ES7277-0AA22-0XA0性能参数 2024-05-08
- 西门子模块6ES7235-0KD22-0XA8性能参数 2024-05-08
- 西门子模块6ES7232-0HD22-0XA0性能参数 2024-05-08
- 西门子模块6ES7232-0HB22-0XA8性能参数 2024-05-08
- 西门子模块6ES7231-7PF22-0XA0性能参数 2024-05-08
- 西门子模块6ES7231-7PD22-0XA8性能参数 2024-05-08
- 西门子模块6ES7231-7PC22-0XA0性能参数 2024-05-08
- 西门子模块6ES7231-7PB22-0XA8性能参数 2024-05-08
- 西门子模块6ES7231-0HF22-0XA0性能参数 2024-05-08
- 西门子模块6ES7231-0HC22-0XA8性能参数 2024-05-08
- 西门子模块6ES7223-1PM22-0XA8性能参数 2024-05-08
- 西门子模块6ES7223-1BM22-0XA8性能参数 2024-05-08
- 西门子模块6ES7223-1PL22-0XA8性能参数 2024-05-08