
西门子模块6ES7212-1AB23-0XB8参数详细

西门子模块6ES7212-1AB23-0XB8参数详细
MM440变频器由微处理器控制,并采用具有现代先进技术水平的绝缘栅双极型晶体管(IGBT)作为功率输出器件。因此,它们具有很高的运行可靠性和功能的多样性。采用脉冲频率可选的脉宽调制技术,可使电动机低噪声运行。全面而完善的保护功能为变频器和电动机提供了良好的保护。MICROMASTER 440具有缺省的工厂设置参数,它是给数量众多的可变速控制系统供电的理想变频传动装置。由于 MICROMASTER 440 具有全面而完善的控制功能,在设置相关参数以后,它也可用于更的电动机控制系统。
1、 电机参数及配重的选择
电梯曳引机选用江苏西德电梯有限公司生产的无齿轮永磁同步电梯曳引机。
主要电机参数:曳引轮直径 400mm 额定电流 25.7A
额定速度 1.5m/s 额定功率 11.5Kw
额定负载 1150Kg 额定扭矩 765N
额定电压 380V 悬挂方式 2/1
额定频率 24Hz 工作制 S5 40%
KP_n, 2.5 Tn_n 60ms

KP_n, 11.5 Tn_n 2.5ms
运行过程中,发现电梯运行在检修模式时,电梯每次停车,都会出现非常大的堵转电流,基本达到了变频器的大电流,实际情况也是电梯停车时都会有很大的震动,通过观察Trace图的电流曲线和抱闸闭合命令输出,大电流出现在抱闸闭合命令输出之前,本样机中变频器的抱闸控制命令是先输出到电梯控制主板,然后由电梯控制主板发出抱闸打开和闭合命令。由Trace图分析,此堵转电流出现是因为电脑控制主板发出停车命令,而后通过检测TTL差分信号得到电机的实际速度后控制抱闸,使抱闸闭合动作先于变频器的抱闸时序,导致电机堵转。通过把变频的抱闸时序和电梯控制主板的抱闸时序进行匹配,消除了此堵转电流。
电梯正常工作时,电机首先到达电梯大速度,电梯控制主板通过楼层距离计算出的速度包络曲线,当轿厢快到达楼层时,切换到慢速运行使轿厢底部与楼层对齐,完成平层动作。当速度控制器Kp_n, 11.5,Tn_n,3ms,电机运行4.5rpm时出现了速度震荡。通过Trace图分析,因为在低速运行时Kp_n偏大,造成电机转速震荡,因为电梯启动时需要电机具有高动态响应能力,所以不能大幅度的减小Kp_n,可以通过慢慢的减小Kp_n,本样机中当Kp_n减小到10.8时,电机速度在4.5rpm出现的速度震荡消失,电梯在整个运行周期内,速度平稳。

Kp_n, 11.5 Tn_n 2.5ms

Kp_n, 10.8 Tn_n 2.5ms,电梯上行 电机发电运行

Kp_n, 10.8 Tn_n 2.5ms,电梯下行 电机电动运行
验收测试及后期优
抱闸力检测功能:
为了保证电梯曳引机抱闸系统的正常运行,增加了抱闸力检测功能。
当电梯处于空闲模式时,电梯控制器会输出抱闸力测试请求,由变频器负责给电机一定的堵转力矩,由电梯控制板检测曳引轮是否出现打滑现象。如果有打滑认为抱闸力不够,电梯停用,否则认为测试正常。
对于IPMSM具有明显的凸极效应,即直轴电感与交轴电感不相等(一般)Ld < Lq
对于SPMSM没有凸极效应,即Ld = Lq
在永磁同步曳引机在电梯主提升的应用过程中,发现隐级式同步电机在停车时会发出有别于抱闸闭合的响声,影响了电梯乘坐的舒适感。
由下图发现现场监控电电机停车S120去使能瞬,由在电机零速停车时,发现有3rpm的速度震荡,这个速度震荡导致了停车噪音的出现。

电机零速停车速度曲线
根据永磁同步电机根据转子结构一般可分为凸极式(IPMSM)和隐级式(SPMSM)的主要不同点是Ld 和 Lq不相等,怀疑是否因为去使能时电流突然变为零,导致了电机的震动。
所以为了验证电流突变是否震荡的直接原因,所以了通过DCC编程减缓了电机去使能时的电流突变。

DCC功能图
实现的主要原理是在电梯控制主板不发启动命令给变频器时,激活DCC斜坡函数。通过扭矩限幅的方式实现电机电流按照斜坡缓慢下降,达到消除电机停车震动的问题。由下图可以看到,当电流按照斜坡下降时,电机速度没有出现抖动
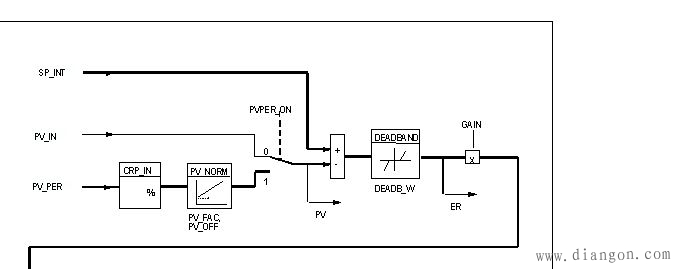
内部 就是自己将外部的模拟量等信号转换成实际物理量后,直接传送到PV_IN 里面,PID功能块再将PV_IN 传送给PV作为PID功能块计算的过程值。 具体 可以参见PID 功能块图 |
- 西门子模块6ES7211-0BA23-0XB0参数详细 2024-05-08
- 西门子模块6ES7211-0AA23-0XB0参数详细 2024-05-08
- 西门子6ES7216-2BD23-0XB8参数详细 2024-05-08
- 西门子6ES7216-2AD23-0XB8参数详细 2024-05-08
- 西门子6ES7214-2BD23-0XB8参数详细 2024-05-08
- 西门子6ES7214-2AS23-0XB8参数详细 2024-05-08
- 西门子6ES7214-2AD23-0XB8参数详细 2024-05-08
- 西门子6ES7214-1BD23-0XB8参数详细 2024-05-08
- 西门子6ES7214-1AD23-0XB8参数详细 2024-05-08
- 西门子6ES7212-1BB23-0XB8参数详细 2024-05-08
- 西门子6ES7212-1AB23-0XB8参数详细 2024-05-08
- 西门子6ES7211-0BA23-0XB0参数详细 2024-05-08
- 西门子6ES7211-0AA23-0XB0参数详细 2024-05-08
- 6ES7216-2BD23-0XB8参数详细 2024-05-08
- 6ES7216-2AD23-0XB8参数详细 2024-05-08