

下面的PLC梯形图程序实现泵每五分钟工作一次,工作五分钟后,再停五分钟,循环往复运行。

图1 泵往复循环工作的PLC梯形图
图1是用S7-200编写的梯形图,图中用一个按钮做电机运行与停车开关(I 0.0)
动作原理:PLC通电运行的个扫描周期,SM0.1=1,使M2.0=0电机不工作,按一下启动按钮I0.0,SR触发器翻转,M2.0=1,使电机上电运转。同时使T100上电,延时5分钟,T100吸合,其常闭点断开,使电机停转,T100的常开触点闭合,使T101上电开始延时,延时5分钟,T101吸合,其常闭触点断开,使T100断电,T100断电又使T101断电,T101断电其常闭点闭合,使电机又通电运行………………,如此这样电机运行5分钟停止5分钟循环运行。如果此时按一下I0.0,会使SR触发器翻转,使M2.0=0,电机停止工作。
西门子PLC排风系统梯形图程序设计实例
导读: 通过典型应用程序的组合和灵活应用,以完成大多数常规程序的设计,是一般设计人员使用的基本方法之一,可以供初学者参考。假设某车间排风系统,采用S7-200PLC控制,并利用工作状态指示灯的不同状态进行监控。
MO.1为2Hz频率闪烁启动信号,M0.2为2Hz频率闪烁输出:M0.3为0.5Hz频率闪烁启动信号,M0.4为0.5Hz频率闪烁输出。
3.风机工作状态检测程序
风机工作状态检测程序可根据已知条件以及I/O地址表,分别对2台以上风机运行、没有风机运行、只有l台风机运行三种情况进行编程,假设以上三种情况对应的内部继电器存储元件分别为MO.O、MO.1、M0.3,可以得到程序如图9-5.2所示。

4.指示灯输出程序
指示灯输出程序只需要根据风机的运行状态与对应的报警灯要求,将以上两部分程序的输出信号进行合并,并按照规定的输出地址控制输出即可。
合并图9-5.1与图9-5.2程序后,可以得到指示灯输出程序如图9-5.3所示。

图9-5.3中事实上MO.I、M0.3分别是M0.2、M0.4的启动条件,因此,利用M0.2直接代替MO.1与M0.2“与”运算支路;M0.4直接代替M0.3与M0.4“与”运算支路也可以得到同样的结果。
此外,由图9-5.2可见,MO.O、MO.1、M0.3不可能有2个或2个以上同时为“1”的可能性,因此,程序设计时不需要在图9-5.3中再考虑输出程序中的“互锁”条件。
5.完整的程序
作为本控制要求的完整实现程序,只需要将以上3部分梯形图进行合并即可。对于指示灯信号来说,无须考虑1个PLC循环时间的影响,因此,程序的先后次序对实际动作不产生影响。
PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。
1、可以在软件中进行自动整定;
2、自动整定的PID参数可能对于系统来说不是好的,就需要手动凭经验来进行整定。P参数过小,达到动态平衡的时间就会太长;P参数过大,就容易产生超调。
PID功能块在梯形图(程序)中应当注意的问题:
1、好采用PID向导生成PID功能块;
2、我要说一个简单的也是容易被人忽视的问题,那就是:PID功能块的使能控制只能采用SM0.0或任何1个存储器的常开触点并联该存储器的常闭触点这样的yongbu断开的触点!
笔者在以前的一个工程调试中就遇到这样的问题:PID功能块有时间动作正常,有时间动作不正常,而且不正常时发现PID功能块都没问题(PID参数正确、使能正确),就是没有输出。后查了好久,突然意识到可能是使能的问题——我在使能端串联了启动/停止控制的保持继电器,我把它改为SM0.0以后,一切正常!
同时也明白了PID功能块有时间动作正常,有时间动作不正常的原因:有时在灌入程序后保持继电器处于动作的状态才不会出现问题,一旦停止了设备就会出现问题——PID功能块使能一旦断开,工作就不会正常!
把这个给大家说说,以免出现同样失误。
下面是PID控制器参数整定的一般方法:
PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。
PID控制器参数整定的方法很多,概括起来有两大类:
一是理论计算整定法。
它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。
二是工程整定方法。
它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。
将存储卡插入到 CPU 中。如果 CPU 处于 RUN 模式,则 CPU 将转入 STOP 模式。维护 (MAINT) LED 闪烁,指示需要对存储卡进行检查。如下图所示:

图2-6:插入更新SMC 存储卡后CPU 的状态
重新启动 CPU,开始固件更新。也可从 STEP 7 将 STOP 模式转为 RUN 模式或复位存储器 (MRES) 来重启 CPU。
2. CPU 重启后,将固件更新版本复制到装载存储器。RUN/STOP LED 将交替闪烁绿色和黄色,表示正在复制更新版本。如下图所示:

图2-7:正在复制更新版本CPU 的状态
3.当 RUN/STOP LED 点亮(黄色常亮)且 MAINT LED 闪烁时,表示复制过程完成。然后可以拨出存储卡。如下图所示:

通过PROFIBUS实现的快速现场总线通讯-现场总线标准
由于S7-1200和现场总线标准PROFIBUS之间近的连接-反应迅速的强大网络-,在将来会实现现场级至控制级之间的统一通讯。这是我们小型自动化领域中一种重要的要求。
有两个将S7-1200连接到PROFIBUS的新通讯模块(CM)。作为DP从站,多可以与DP Master CP 1243-5连接16个现场设备,例如作为分散的外围设备ET 200单元。S7-1200具有CM 1242-5 的DP从站的功能,因此,可连接到任何其他DP主站。通过背板总线轻松地将两个模块连接到左侧的CPU。
连网简单
为了减少布线和提供大的连网灵活性, CSM 1277小型交换机模块可用于配置统一或者混合网络-采用线型、树型或星型拓扑结构。CSM 1277是一个4端口非管理型交换机,允许您将SIMATIC S7-1200与多三个额外的设备相连接。
远程控制应用简单
新的通讯处理器CP 1242-7能够通过网络或互联网从一个集线器实现对分布式S7-1200单元的监测和控制。

西门子模块6ES7155-5BA00-0AB0
数字量信号板通过信号板 (SB, Signal Board) 可以给 CPU 增加 I/O。提供所有 SIMATIC S7-1200 控制器的低成本有效扩展,同时保持原有空间, SB 连接在 CPU 的前端。

SB 1221 200KHZ数字量输入接线
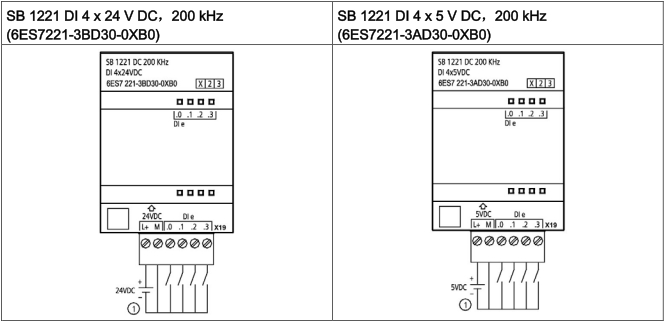
① 仅支持源型输入
SB 1222 200KHZ数字量输出接线
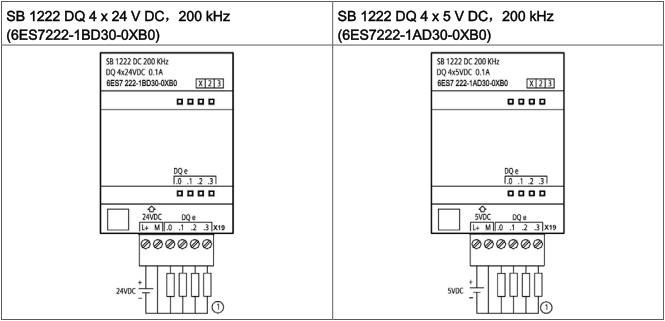
① 对于源型输出将负载连接到“-"端(如图示);对于漏型输出将负载连接到“+"端
SB 1223 200KHZ数字量输入/输出接线
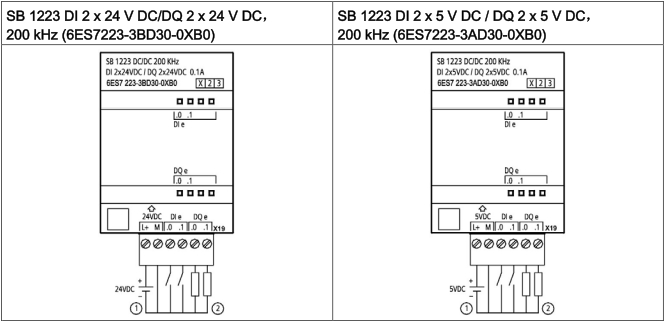
① 仅支持源型输入
② 对于源型输出将负载连接到“-"端(如图示);对于漏型输出将负载连接到“+"端
SB 1223 数字量输入/输出接线

① 仅支持漏型输入
