
西门子模块6ES7223-1PH22-0XA8诚信经营







西门子模块6ES7223-1PH22-0XA8诚信经营
1. 组播
组播技术是ip网络数据传输三种方式之一,在介绍ip组播技术之前,先对ip网络数据传输的单播、组播和广播方式做一个简单的介绍,见图1:
单播(unicast)传输:在发送者和每一接收者之间实现点对点网络连接。如果一台发送者同时给多个的接收者传输相同的数据,也必须相应的复制多份的相同数据包。如果有大量主机希望获得数据包的同一份拷贝时,将导致发送者负担沉重、延迟长、网络拥塞;为保证一定的服务质量需增加硬件和带宽。
组播(multicast)传输:在发送者和每一接收者之间实现点对多点网络连接。如果一台发送者同时给多个的接收者传输相同的数据,也只需复制一份的相同数据包。它提高了数据传送效率。减少了骨干网络出现拥塞的可能性。
广播(broadcast)传输:是指在ip子网内广播数据包,所有在子网内部的主机都将收到这些数据包。广播意味着网络向子网每一个主机都投递一份数据包,不论这些主机是否乐于接收该数据包。所以广播的使用范围非常小,只在本地子网内有效,通过路由器和交换机网络设备控制广播传输。

图1
2. 组播ip地址
组播ip地址用于标识一个ip组播组。iana(internet assigned number authority)把d类地址空间分配给ip组播,其范围是从224.0.0.0到239.255.255.255。如下所示(二进制表示),ip组播地址前四位均为1110。
八位组(1) 八位组(2) 八位组(3) 八位组(4)
1110xxxx xxxxxxxx xxxxxxxx xxxxxxxx
组播组可以是的也可以是临时的。组播组地址中,有一部分由官方分配的,称为组播组。组播组保持不变的是它的ip地址,组中的成员构成可以发生变化。组播组中成员的数量都可以是任意的,甚至可以为零。那些没有保留下来供组播组使用的ip播地址,可以被临时组播组利用。
224.0.0.0~224.0.0.255为预留的组播地址(组地址),地址224.0.0.0保留不做分配,其它地址供路由协议使用; 224.0.1.0~238.255.255.255为用户可用的组播地址(临时组地址),全网范围内有效;239.0.0.0~239.255.255.255为本地管理组播地址,仅在特定的本地范围内有效。常用的预留组播地址如下:
224.0.0.0 基准地址(保留) 224.0.0.1 所有主机的地址 224.0.0.2 所有组播路由器的地址。
3. 网络二层组播相关协议
不支持组播的交换机,数据在里面是泛洪传播的,数据也是可以进行传送的。解决第二层组播数据洪泛的问题,引入igmp snooping及gmrp等概念。
网络二层组播相关协议包括igmp snooping ,igmp proxy和cgmp协议。
igmp协议运行于主机和与主机直接相连的组播路由器之间,主机通过此协议告诉本地路由器希望加入并接受某个特定组播组的信息,同时路由器通过此协议周期性地查询局域网内某个已知组的成员是否处于活动状态(即该网段是否仍有属于某个组播组的成员),实现所连网络组成员关系的收集与维护。
igmp snooping的实现机理是:交换机通过侦听主机发向路由器的igmp成员报告消息的方式,形成组成员和交换机接口的对应关系;交换机根据该对应关系将收到组播数据包只转给具有组成员的接口。通过上述机制,在组播路由器里建立起一张表,其中包含路由器的各个端口以及在端口所对应的子网上都有哪些组的成员。当路由器接收到某个组g的数据报文后,只向那些有g的成员的端口上转发数据报文。
4. step7中的组态
simatic s7-400系列cp模块之间有哪些区别?
本文中以s7-300 cp343-1模块为例,具体组态步骤如下:
a) 在step7项目插入两个cpu,分别组态两个cp343-1,分配ip地址,分别为192.168.0.10和192.168.0.11。
b) 打开netpro,在两个cpu下分别插入新的连接,连接类型选择“udp connection”链接对象选择“all multicast stations”,如图2。
c) 如图3,在弹出的属性窗口显示出连接“id”和“laddr”参数,之后编程会用到。
d) 在“address”界面下,“local”自定义本地的端口号;“multicast group”定义所要加入的组播组地址和通讯对方的端口号,可用的组播地址从224.0.1.0到239.255.255.255,可用的端口号从1025到65535,如图4、图5。

图2

图3

图4

图5
e) 编译无误后,分别下载到两个cpu。
f) 编程,在程序中调用fc5 “ag_send” 、fc6 “ag_recv”。“id”和“laddr”填写连接中的参数;“send”“len”定义发送的数据区和发送的长度;如图6,定义了发送接收都是20字节。完成后下载到cpu。

图6
g) 使用tcp/udp测试工具添加一个组播成员到组播组,如图7。

图7
h) 测试结果,在ip:192.168.0.10侧触发“ag_send”,则数据会发给所有属于ip组:224.0.1.0 端口号为2002的成员,如图8、图9。

图8

图9
5. 交换机的设置
交换机如果不做任何设置,或者不支持组播,数据也是可以进行传送的,但是是泛洪传播的。为了提高效率,应该在交换机中激活igmp snooping,如图10,本例中使用西门子scalance x312。通过igmp snooping,这样交换机就能够形成端口和组播组成员的对应关系,交换机根据该对应关系将收到的组播数据包只传给属于改组的端口,如图11。图12显示了组播ip地址到二层mac地址的映射关系。

图10
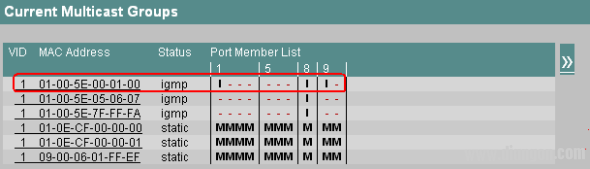
图11

图12
要用好pid调节,搞清楚pid的计算公式和pid参数的意义是很有必要的。下面是pid的公式:
![]()
式中误差信号e(t) = sp(t) – pv(t),m(t)是pid控制器的输出值,kc是控制器的增益(比例系数),ti和td分别是积分时间和微分时间,minitial是m(t)的初始值,实际上是积分的初始值。
pid公式的前3项分别与误差、误差的积分和误差的导数成正比。
微分、积分是高等数学的概念,建议没有学过高等数学的网友至少要搞清楚微分和积分的几何意义,这对深入理解pid参数的意义有很大的帮助。
积分对应于下图中误差曲线e(t) 与坐标轴包围的面积(图中的灰色部分)。pid程序是周期性执行的,执行pid程序的时间间隔为ts(即pid控制的采样周期)。我们只能使用连续的误差曲线上间隔时间为ts的一些离散的点的值来计算积分,因此不可能计算出准确的积分值,只能对积分作近似计算。
一般用下图中的矩形面积之和来近似jingque积分。当ts较小时,积分的误差不大。

在误差曲线e(t)上作一条切线(见下图),该切线与x轴正方向的夹角α的正切值tgα即为该点处误差的一阶导数de(t)/dt。pid控制器输出表达式中的导数用下式来近似:
de(t)/ dt ≈ δe(t)/δt = [e(n) - e(n-1)]/ts,式中e(n)是第n次采样时的误差值,e(n-1)是第n-1次采样时的误差值。

pid调节是目前应用广泛调节控制规律,p比例、i积分、d微分控制,简称pid控制。
比例控制是一种简单的控制方式。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节可以使系统消除稳态误差。系统如果在进入稳态后存在稳态误差,就必须引入“积分项”。比例+积分(pi)控制可以使系统在进入稳态后无稳态误差。
微分作用能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。因此,可以改善系统的动态性能。。对有较大惯性或滞后的被控对象,比例+微分(pd)控制能改善系统在调节过程中的动态特性。
这是摘录的一个pid参数调整的口诀,以供大家学习参考:
参数整定找佳,从小到大顺序查
先是比例后积分,后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低。
这个顺口溜流传甚广,我觉得可操作性很低(也可能是我的悟性不够),我有很多疑问:
“从小到大顺序查“,查什么?
一定要”先是比例后积分“吗?直接用pi不好吗?
“曲线振荡很频繁”,是指振荡频率高还是振荡次数多?
什么是”比例度盘“?
”曲线漂浮绕大湾“什么意思?是指超调量大吗?还是上升缓慢?
”曲线波动周期长“的周期是震荡周期吗?还是过度过程时间长?
振荡频率和微分关系大吗?微分的主要作用是什么?
“理想曲线两个波”,一个波是180度还是360度?两个波是理想曲线,下图的pv曲线理不理想?

我用过s7-200和s7-200 smart的pid调节控制面板和pid参数自整定功能,被控制对象采用我编写的子程序来模拟。被控对象的参数如下:增益为3.0,两个惯性环节的时间常数为5s和2s。
下面是自整定之前的曲线,超调量太大:

下面是整定过程的曲线:

下面是整定得到的参数的曲线:

下面是另一组整定前的参数的曲线,过程变量pv曲线上升太慢:

虽然整定前两组pid参数相差很远,两次整定后得到pid参数差不多,使用整定得到的pid参数的曲线形状也差不多。
我觉得西门子的pid参数自整定是很好用的。
要用好pid调节,搞清楚pid的计算公式和pid参数的意义是很有必要的。下面是pid的公式:
![]()
pid公式的前3项分别与误差、误差的积分和误差的导数成正比。
一般用下图中的矩形面积之和来近似jingque积分。当ts较小时,积分的误差不大。


1.模糊控制的关键点在于总结大量的实践数据,然后做成黑匣子,看似神秘,实际都是经验参数!
2.模糊控制得到的数据是基于控制设备性能不变的情况下,是较为准确的。一旦使用时间长了,性能有所下降,这些经验参数往往就会有很大的偏颇了。
3.即使是同样型号的不同设备,其所处于的工艺环境,工艺流程,工艺特性的不同,其性能也会有差别,因此不能做到模糊控制中同一数据的重复性使用。
4.模糊控制的理念是很好的,起码是超前控制,但就目前而言,其实用性,动态性还是不如传统的pid。
5.传统pid是滞后控制,在目前的大多数工艺环境下,还是可以满足控制的需求的。
6.基于传统pid的特点,也延展了不同的控制方式,如串级调节,三冲量调节,分程调节,步进式等等。#p#分页标题#e#
7.个人觉得:随着,网络,计算机的飞速发展,传统pid的滞后也会改善的更好,其动态调节特性是模糊控制所不能比拟的。
搞清楚pid参数的物理意义,和pid参数与闭环系统性能指标的关系,对于指导我们调节pid至关重要。
pid的控制原理可以用人对炉温的手动控制来理解。首先看看比例部分的作用。
搞清楚pid参数的物理意义,和pid参数与闭环系统性能指标的关系,对于指导我们调节pid至关重要。首先看看比例部分的作用。
pid的控制原理可以用人对炉温的手动控制来理解。操作人员用眼睛读取数字仪表检测到的炉温的测量值,并与炉温的设定值比较,得到温度的误差值。用手操作电位器,调节加热的电流,使炉温保持在设定值附近。
操作人员知道使炉温稳定在设定值时电位器的位置(我们将它称为位置l),并根据当时的温度误差值调整电位器的转角。炉温小于设定值时,在位置l的基础上顺时针增大电位器的转角,以增大加热的电流;炉温大于设定值时,在位置l的基础上反时针减小电位器的转角,以减小加热的电流。令调节后的电位器转角与位置l的差值与误差成正比,误差值越大,调节的角度越大。上述控制策略就是比例控制。
闭环中存在着各种各样的延迟作用。调节电位器转角后,到温度上升到新的转角对应的稳态值时有较大的延迟。由于延迟因素的存在,调节电位器转角后不能马上看到调节的效果,因此闭环控制系统调节困难的主要原因是系统中的延迟作用。
如果增益太小,调节的力度不够,使温度的变化缓慢,调节时间过长。如果增益过大,调节力度太强,造成调节过头,可能使温度忽高忽低,来回震荡。
如果闭环系统没有积分作用,单纯的比例控制有稳态误差,稳态误差与增益成反比。增益越大,稳态误差越小,但是会使超调量增大,振荡次数增加,甚至会使闭环系统不稳定。因此单纯的比例控制很难兼顾动态性能和静态性能。
