
西门子模块6ES7212-1BB23-0XB8低价销售






西门子模块6ES7212-1BB23-0XB8低价销售
使用中常常遇到因个别参数设置不当,导致变频器不能正常工作的现象。
控制方式:即速度控制、转距控制、PID控制或其他方式。采取控制方式后,一般要根据控制精度,需要进行静态或动态辨识。
低运行频率:即电机运行的小转速,电机在低转速下运行时,其散热性能很差,电机长时间运行在低转速下,会导致电机烧毁。而且低速时,其电缆中的电流也会增大,也会导致电缆发热。
高运行频率:一般的变频器大频率到60Hz,有的甚至到400 Hz,高频率将使电机高速运转,这对普通电机来说,其轴承不能长时间的超额定转速运行,电机的转子是否能承受这样的离心力。
载波频率:载波频率设置的越高其高次谐波分量越大,这和电缆的长度,电机发热,电缆发热变频器发热等因素是密切相关的。
电机参数:变频器在参数中设定电机的功率、电流、电压、转速、大频率,这些参数可以从电机铭牌中直接得到。
跳频:在某个频率点上,有可能会发生共振现象,特别在整个装置比较高时;在控制压缩机时,要避免压缩机的喘振点
MM440标准变频器的特点图下:
440变频器由32位微处理器控制,变频器的功率元件采用IGBT,是全新一代多功能标准变频器。它采用高性能矢量控制技术,能提供低速高转矩输出和良好的动态特性,同时具备*的过载能力。
其控制功能主要有:
线性V/f控制,平方V/f控制,可编程多点设定V/f控制,磁通电流控制,无测速矢量控制;标准参数结构,标准测试软件;数字量输进6个,模拟量输进2个,模拟量输出2个,继电器输出3个;独立的I/O端子板,方便维护;采用BICO技术,实现I/O端口自由连接;内置PID控制器,参数自整定;集成RS-485接口;具有15个固定频率,4个跳转频率,可编程;可实现主从控制及力矩控制方式;在电源消失或故障时具有自动再起动功能;灵活的斜坡函数发生器,带有起始段和结束段的平滑特性;快速电流限制(FCL),防止运行中不应有的跳闸;有直流制动和复合制动方式,进步制动性能。
主要保护功能有:
过载能力为200%额定负载电流,
持续时间3s和150%额定负载电流,持续时间60s;
过电压,欠电压保护;
变频器和电机过热保护;
接地故障保护,短路保护;
闭锁电机保护,防止失速保护;
采用PIN编号实现参数联锁。
三.控制系统构成
主控系统由霍尼威尔的PKS系统和变频器组成,变频器的两地转换、开停、故障、复位等信号集中上位机进行操纵和监控
200V-240V ±10%,单相/三相,交流,0.12kW-45kW;
380V-480V±10%,三相,交流,0.37kW-250kW;
矢量控制方式,可构成闭环矢量控制,闭环转矩控制;
高过载能力,内置制动单元;
三组参数切换功能。
控制功能
线性v/f控制,平方v/f控制,可编程多点设定v/f控制,磁通电流控制免测速矢量控制,闭环矢量控制,闭环转矩控制,节能控制模式;
标准参数结构,标准调试软件;
数字量输入6个,模拟量输入2个,模拟量输出2个,继电器输出3个;
独立I/O端子板,方便维护;
采用BiCo技术,实现I/O端口自由连接;
内置PID控制器,参数自整定;
集成RS485通讯接口,可选PROFIBUS-DP/Device-Net通讯模块;
具有15个固定频率,4个跳转频率,可编程;
可实现主/从控制及力矩控制方式;
在电源消失或故障时具有自动再起动功能;
灵活的斜坡函数发生器,带有起始段和结束段的平滑特性;
快速电流限制(FCL),防止运行中不应有的跳闸;
有直流制动和复合制动方式提高制动性能。
保护功能
过载能力为200%额定负载电流,持续时间3秒和150%额定负载电流,持续时间60秒;
过电压、欠电压保护;
变频器、电机过热保护;
接地故障保护,短路保护;
闭锁电机保护,防止失速保护;
采用PIN编号实现参数连锁。
西门子6SE6440-2UE32-2DA1
V90 PTI 固件版本 1.05 以上开始,伺服驱动器提供了 Modbus RTU 通信功能。PLC可以通过Modbus的FC3及 FC6功能代码读取或写入伺服驱动的寄存器,S7-1200可通过标准的Modbus功能块完成发送伺服驱动器的控制指令及读写驱动的参数。
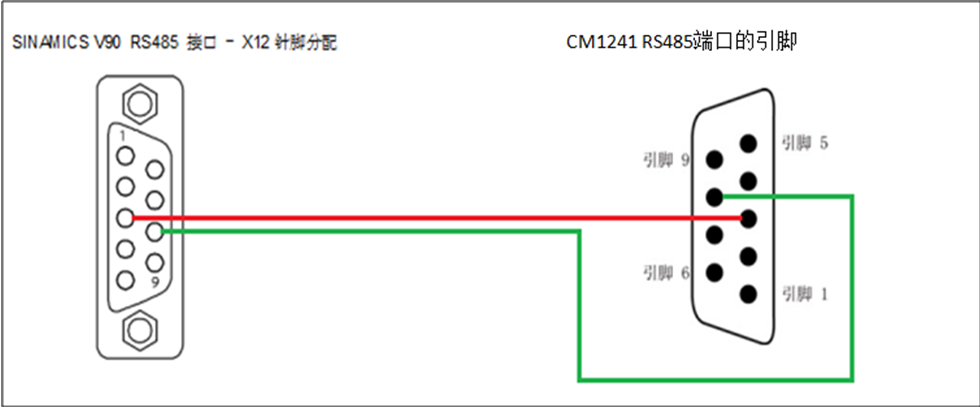
1. 通信连接
V90 伺服驱动通过 RS485 接口(X12)使用 MODBUS 协议与 PLC RS485 端口进行通讯。
2. 通过 Modbus 通信实现 V90 内部位置控制的 MDI 功能控制
(1) V90 Modbus 寄存器说明
对于不同固件版本V90 PTI,内部控制的控制数据寄存器是不同的。
对于FW V1.07及后续版本:
寄存器编号描述单位定标系数范围40100IPOS控制模式控制字40102MDI 位置设定值高字LU1-2147482648
至
2103MDI 位置设定值低字40104MDI 速度设定值高字1000
LU/min11 至
2105MDI 速度设定值低字40934MDI 加速度倍率%1000.1 至 10040935MDI 减速度倍率%1000.1 至 100
对于FW V1.07以前版本:
寄存器编号描述单位定标系数范围40100IPOS控制模式控制字40102MDI 位置设定值高字LU1-2147482648
至
2103MDI 位置设定值低字40932MDI 速度设定值高字1000
LU/min11 至
2933MDI 速度设定值低字40934MDI 加速度倍率%1000.1 至 10040935MDI 减速度倍率%1000.1 至 100
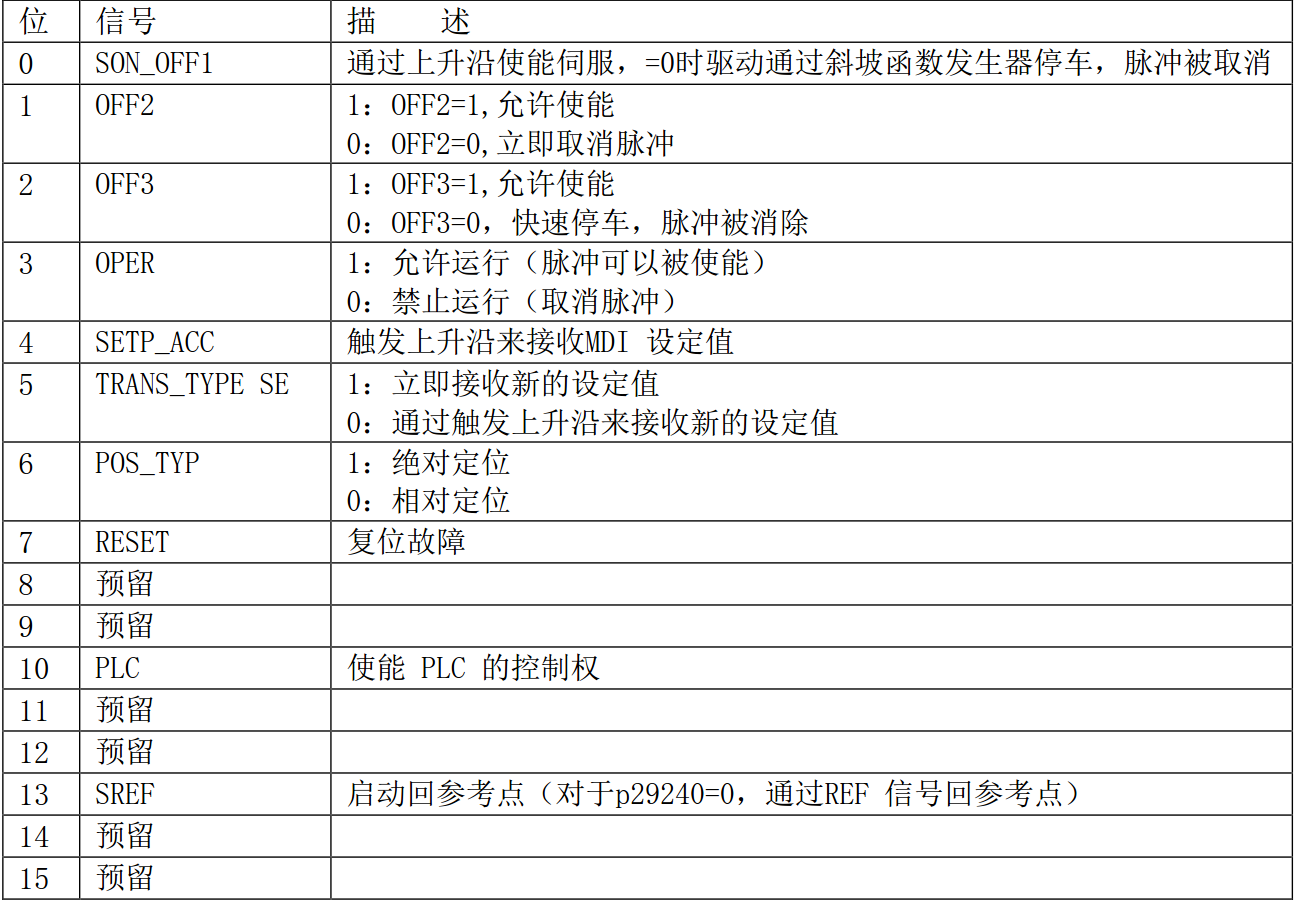
IPOS控制模式寄存器 40100控制字的定义:
3. V90参数设置
按照下表设置伺服驱动器的相关参数:

4. PLC 的指令说明
博途中为S7-1200的MODBUS通信提供了MODBUS(RTU)V3.0的指令库。
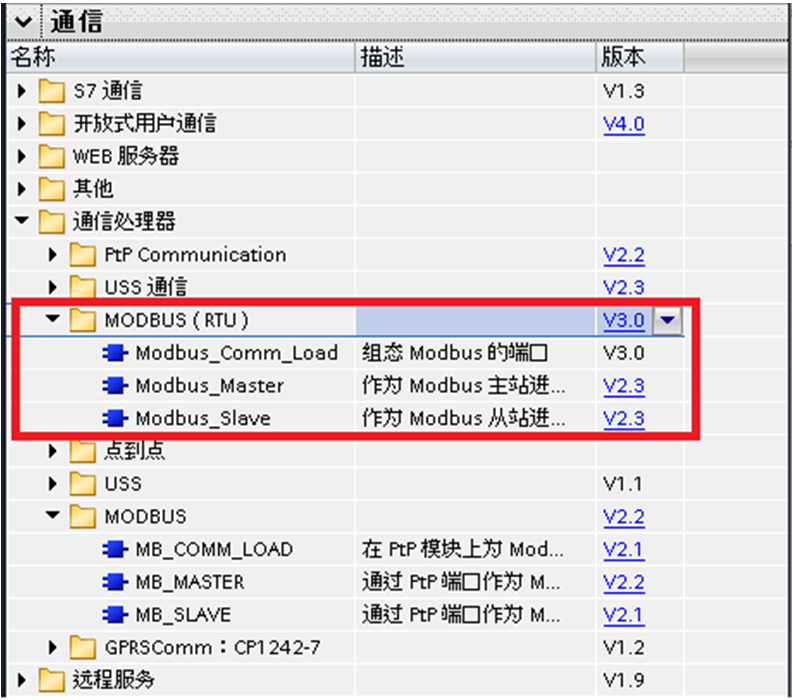
MODBUS(RTU)V3.0 指令库在满足以下条件时可以使用:
S7-1200 CPU 硬件版本>=V4(订货号:6ES721x-1xx40-0XB0) ,并且:
(1) 使用 CB 1241 RS485 (订货号: 6ES7241-1CH30-1XB0)时,S7-1200 CPU 固件版本 >= V4.1.1。
(2) 使用 CM 1241 RS422/485 (订货号: 6ES7241-1CH32-0XB0)时, CM 1241 固件版本 >= V2.1。
(3) 使用 CM 1241 RS232 (订货号: 6ES7241-1AH32-0XB0)时, CM 1241 固件版本 >= V2.1。
满足以上条件时,也可使用 MODBUS V2.2 的指令库。但当以上条件不满足时,只能使用 MODBUS V2.2 的指令。
"MB_COMM_LOAD"指令用于组态端口使用 Modbus RTU 协议来通信。组态该端口后,可通过执行"MB_SLAVE"或"MB_MASTER"指令以通过 Modbus 进行通信。
"MB_COMM_LOAD"只需被调用一次,就可修改某个通信参数,每次调用会删除通信缓冲区中的内容。为避免通信期间数据丢失,应避免不必要地调用该指令。
插入"MB_MASTER"或"MB_SLAVE"指令时,将背景数据块。当在"MB_COMM_LOAD"指令中 MB_DB 参数时,将引用该背景数据块
MICROMASTER 系列变频器可满足 0.12 kW 至 250 kW 功率范围的驱动应用要求:从采用电压-频率控制(V/f 控制)的简单应用,直至采用闭环矢量控制和编码器反馈的复杂应用。
使用西门子的 MICROMASTER 420,这不会成为问题,因为这是一款适用于三相电网且可进行现场总线连接的通用型变频器。这种变频器具有模块化的设计,各种选件可对广泛的标准功能加以补充。您只需将操作员面板和通讯模块插入即可,无需使用任何工具
由驱动系统执行的每个任务都具有自身的特定要求。因此,需要提供可方便而灵活地加以调整以应对各种挑战的变频器解决方案。西门子的模块化 MICROMASTER 430 变频器就拥有这种灵活性。它专门用于工业领域内的泵和风机,可执行相似应用中的广泛任务。与 MICROMASTER 420 相比,这种变频器能效更高,输入与输出更多,并且操作员面板经过优化,可在手动和自动操作模式之间切换。
在变频器领域,也存在着一些难以控制的东西。直到西门子功能强大的变频器问世之后,情况才有了改观。MICROMASTER 440 是专门针对与通常相比需要更加广泛的功能和更高动态响应的应用而设计的。这些矢量控制系统可确保一致的高驱动性能,即使发生突然负载变化时也是如此。由于具有快速响应输入和定位减速斜坡,因此,甚至在不使用编码器的情况下也可以移动至目标位置。该变频器带有一个集成制动斩波器,即使在制动和短减速斜坡期间,也能以突出的精度工作。所有这些均可在 0.12 kW (0.16 HP) 直至 250 kW (350 HP) 的功率范围内实现
西门子变频器6SE6440-2UE31-8DA1
V90 PTI 固件版本 1.05 以上开始,伺服驱动器提供了 Modbus RTU 通信功能。PLC可以通过Modbus的FC3及 FC6功能代码读取或写入伺服驱动的寄存器,S7-200 SMART 可通过标准的Modbus功能块完成发送伺服驱动器的控制指令及读写驱动的参数。
1. 通信连接
V90 伺服驱动通过 RS485 接口(X12)使用 MODBUS 协议与 PLC RS485 (端口 0) 进行通讯

2. 通过 Modbus 通信实现 V90 内部位置控制的 MDI 功能控制
(1) V90 Modbus 寄存器说明
对于不同固件版本V90 PTI,内部控制的控制数据寄存器是不同的。
对于FW V1.07及后续版本:
IPOS控制模式寄存器 40100控制字的定义:

3. V90参数设置
按照下表设置伺服驱动器的相关参数:

4. PLC 的编程
1.初始化Modbus通信接口,需确保 PLC 的波特率与驱动设置一致,设置 PLC 校验方式为偶校验(parity = 2)。

2.通过寄存器 40100 写入需要的控制字。必须设置寄存器 40100 的位 10 为 1 以允许PLC 控制驱动。使能驱动器,先将16进制数 40E 写入寄存器 40100 中,然后再写入40F。

3.如果需要对带增量编码器驱动执行回参考点操作,保持驱动为伺服使能状态,可通过写控制字 40100 第13位,执行回参考点操作。
4.通过MBUS_MSG功能块,将位置设定值、速度设定值及加速度减速度倍率写入寄存器 40102、40103、40104、40105、40934 和40935 中。


5.MDI相对定位的40100控制寄存器操作:
(1) 在IPos 控制模式中,控制字的位6=0选择相对定位模式(40F)
(2) 控制字的位5=0,设置使用上升沿来接收MDI 设定值(40F)
(3) 将寄存器写入需要的值 (如40934及40935写入十进制的10000(),40104/40105写入MDI速度值,40102/40103写入MDI的位置值) 后,通过PLC发送控制字的位4上升沿来接收设定值,驱动进行MDI运行(41F)。
MDI定位的40100控制寄存器操作:
(1) 在IPos 控制模式中,控制字的位6=1来选择定位模式(44F)
(2) MDI设定值的生效有两种:
MDI设定值立即生效: 控制字的位5=1,设置接收的MDI设定值立即生效(46F);
上升沿来接收MDI设定值:控制字的位5=0,设置使用上升沿来接收MDI 设定值(44F)
(3) 将寄存器写入需要的值 (如40934及40935写入十进制的10000(),40104/40105写入MDI速度值,40102/40103写入MDI的位置值)后,如果是MDI设定值立即生效,则驱动进行MDI运行。如果是通过上升沿接收MDI设定值,则通过PLC发送控制字的位4的上升沿来接收设定值(45F),驱动进行MDI运行。
