
6ES7223-1BL22-0XA8参数说明






6ES7223-1BL22-0XA8参数说明
V90 PN可以通过PROFINET通信与PLC连接,通过PROFIDrive报文实现PLC对V90的通信控制。
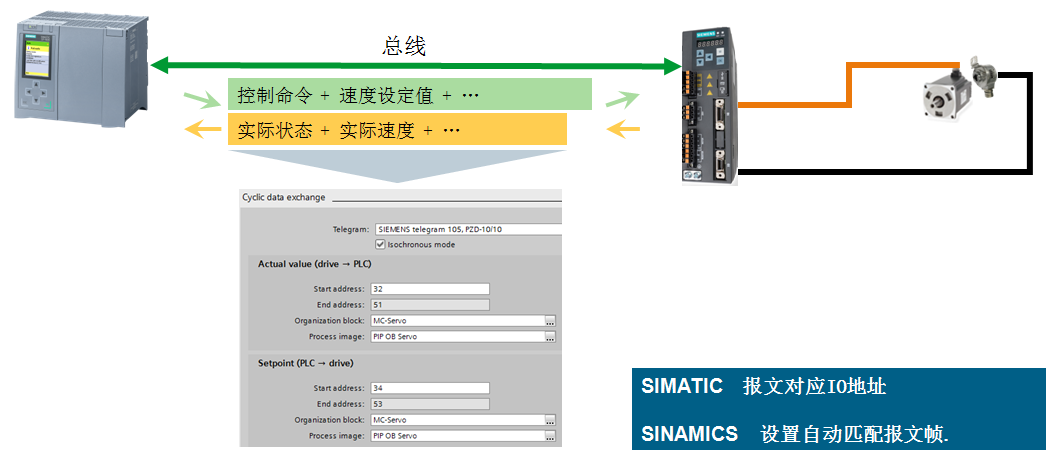
可以选择的 PROFIDrive 报文,SINAMICS V90 PN 目前支持的报文如下:
? 标准报文 1:速度控制
? 标准报文 2:速度控制
? 标准报文 3:速度/位置控制(1200配置TO时使用)
? 标准报文 102:速度/位置控制
? 标准报文 5/105(DSC):速度/位置控制(1500(T)配置TO时使用)
? 西门子报文 111(EPOS):1200/1500通过FB284控制V90 EPOS定位
仅在 V90 PN 与 S7-1500/1500T 连接时才能使用 5 号以及 105(DSC) 号报文!
PROFINET RT/IRT 通信的区别
PROFINET IO 是一种基于以太网的实时协议,在工业自动化应用中作为网络使用。网络包括以 下设备:
● IO 控制器:典型的是 PLC,用于控制整个系统
● IO 设备:一个分散式 IO 设备(例如,编码器,驱动器),通过 IO 控制器控制
PROFINET 提供两种实时通信,PROFINET IO RT(实时)和 PROFINET IO IRT(等时实时)。
在 PROFINET IO RT 通道中,实时数据通过优先以太网帧进行传输。没有特殊的硬件要求。基于该优先级别,其循环周期可达到 4 ms。S7-1200连接V90 PN采用RT通信。
IRT 通道适用于传输具有更加jingque时间要求的数据,其循环周期可达 2 ms,S7-1500连接V90 PN采用IRT通信,必须采用带DSC功能的通信报文5/105。
常问问题
 V90在EPOS工作模式下好使用哪个通信报文?
V90在EPOS工作模式下好使用哪个通信报文?
西门子报文111。
1200PLC连接V90PN,如果组态工艺对象应该用哪个报文?
位置轴控制采用3号报文
1500PLC连接V90PN,如果组态工艺对象应该用哪个报文?
采用105号报文,带DSC功能。
在博途中组态V90 PN时为什么找不到111报文?
需要使用 V90的GSD文件组态,使用HSP组态找不到111报文。
V90 PN 设置报文时为什么找不到111报文?
需要使用V-Assistant软件把 V90 驱动器的控制模式设置为"基本位置控制(EPOS)",之后才可以设置111报文。
铜川西门子代理商
西门子变频器MicroMaster440是全新一代可以广泛应用的多功能标准变频器。
它采用高性能的矢量控制技术,提供低速高转矩输出和良好的动态特性,同时具备*的过载能力,以满足广泛的应用场合。创新的BiCo(内部功能互联)功能有的灵活性。
主要特征:
200V-240V ±10%,单相/三相,交流,0.12kW-45kW; 380V-480V±10%,三相,交流,0.37kW-250kW;
矢量控制方式,可构成闭环矢量控制,闭环转矩控制;
高过载能力,内置制动单元;
三组参数切换功能。控制功能: 线性v/f控制,平方v/f控制,可编程多点设定v/f控制,磁通电流控制免测速矢量控制,闭环矢量控制,闭环转矩控制,节能控制模式;
标准参数结构,标准调试软件;
数字量输入6个,模拟量输入2个,模拟量输出2个,继电器输出3个;
独立I/O端子板,方便维护;
采用BiCo技术,实现I/O端口自由连接;
内置PID控制器,参数自整定;
集成RS485通讯接口,可选PROFIBUS-DP/Device-Net通讯模块;
具有15个固定频率,4个跳转频率,可编程;
可实现主/从控制及力矩控制方式;
在电源消失或故障时具有"自动再起动"功能;
灵活的斜坡函数发生器,带有起始段和结束段的平滑特性;
快速电流限制(FCL),防止运行中不应有的跳闸;
有直流制动和复合制动方式提高制动性能。
保护功能:
过载能力为200%额定负载电流,持续时间3秒和150%额定负载电流,持续时间60秒;
过电压、欠电压保护;
变频器、电机过热保护;
接地故障保护,短路保护;
闭锁电机保护,防止失速保护;
采用PIN编号实现参数连锁。
MicroMaster430
西门子变频器MicroMaster430是全新一代标准变频器中的风机和泵类变转矩负载专家。功率范围7.5kW至250kW。它按照专用要求设计,并使用内部功能互联(BiCo)技术,具有高度可靠性和灵活性。控制软件可以实现专用功能:多泵切换、手动/自动切换、旁路功能、断带及缺水检测、节能运行方式等。
主要特征:
380V-480V±10%,三相,交流,7.5kW-250kW;
风机和泵类变转矩负载专用;
牢固的EMC(电磁兼容性)设计;
控制信号的快速响应;
控制功能:
线性v/f控制,并带有增强电机动态响应和控制特性的磁通电流控制(FCC),多点v/f控制;
内置PID控制器;
快速电流限制,防止运行中不应有的跳闸;
数字量输入6个,模拟量输入2个,模拟量输出2个,继电器输出3个;
具有15个固定频率,4个跳转频率,可编程;
采用BiCo技术,实现I/O端口自由连接;
集成RS485通讯接口,可选PROFIBUS-DP通讯模块;
灵活的斜坡函数发生器,可选平滑功能;
三组参数切换功能:电机数据切换,命令数据切换;
风机和泵类专用功能:
多泵切换;
旁路功能;
手动/自动切换;
断带及缺水检测 ;
节能方式;
保护功能:
过载能力为140%额定负载电流,持续时间3秒和110%额定负载电流,持续时间60秒;
过电压、欠电压保护;
变频器过温保护;
接地故障保护,短路保护;
I2t电动机过热保护;
PTC Y电机保护。

Drive ES 是一个工程组态系统,可方便而有效地将西门子驱动技术的通信、组态和数据管理功能集成到 SIMATIC 自动化环境中。
以下软件包可供选择:
Drive ES (Drive Engineering Software) 可将西门子的变频器全面集成到全集成自动化环境中。
以下软件包可供选择:
Drive ES Basic Maintenance
该软件产品可确保实现 STARTER 不支持的之前驱动系统的 TIA 功能。
Drive ES Basic 保养是一款针对全集成自动化领域新手用户的基本软件,用于在该环境中在线和离线设置所有驱动的参数。使用 Drive ES Basic 保养可在 SIMATIC Manager 的操作界面上对自动化系统和驱动系统进行操作。Drive ES Basic 保养是用来对整个项目中的数据进行统一存档、将 SIMATIC 的远程服务功应用到变频器中的起点。Drive ES Basic 提供了用于新运动控制功能的组态工具(从站间的通信,通过 ROFIBUS DP 实现等距离和等时同步操作),可确保将带有 PROFINET IO 接口的变频器简便集成到 SIMATIC 环境中。
注意:
对于 SINAMICS 和 MICROMASTER 4 变频器,此 TIA 功能也随 STARTER 调试工具(V4.3.2 及更高版本)提供。
Drive ES PCS 7(APL 型或经典型)
Drive ES PCS 7 将带有 PROFIBUS DP 接口的变频器连接到 SIMATIC PCS 7 过程控制系统,需要首先安装 SIMATIC PCS 7 V6.1 和更高版本。Drive ES PCS 7 为操作员站提供了块库,其中包括用于变频器的函数块和用于操作员站的相应面板,以便能通过 PCS 7 过程控制系统来操作变频器。从 V6.1 起,还可在 PCS 7 维护站中显示变频器。
在 Drive ES PCS 7 V8.0 及更高,提供了两个版本的库:APL(过程库)型和以前的所谓经典型。
西安西门子代理商
SM 331,8输入,13位分辨率
SM 331,8输入,9/12/14位分辨率
SM 331,2输入,9/12/14位分辨率
SM 331,8输入,增强型16位分辨率
SM 331,8输入,增强型16位分辨率,4通道模式
SM 331,8输入,14位分辨率,用于等时线模式
SM 331,8输入,用于热电阻,符合GOST标准
SM 331,8输入,用于热电偶,符合GOST标准
模拟量输出模块
SM 332,4输出
当PLC运行时,CPU就要执行用户程序中的操作。但是CPU不可能同时执行多个操作,只能分时地一个操作一个操作地执行。PLC利用系统软件在其内部建立了输入输出映像区,当PLC的CPU执行用户程序时,从输入映像区中读取输入信号的状态,进行相应的操作。当CPU执行完个操作后,将操作结果输出到输出映像区,然后再执行第二个操作,操作结果送到输出映像区。在程序执行过程中,PLC并不读取输入信号的真正状态,执行结果也并没有输出到PLC外部。只有当程序执行到结束指令(END)时,将输出映像区中执行结果向PLC外部输出一次,将输入信号的状态读取一次送到输入映像区。对输入输出信号的这一操作过程称为I/O刷新。I/O刷新完成后,CPU再从用户程序的条指令开始,进行下一次程序执行。PLC的这种工作方式被称为扫描方式。
PLC的扫描周期包括上电后初始处理、共同处理、上位链接服务、外设服务、运算处理、I/O刷新
在OB1的扫描周期中,CPU扫描并形成RLO值,若该RLO值是0且上次RLO值是1,这说明FN指令检测到一个RLO的负跳沿,那么FN指令把RLO位置1。如果RLO在相邻的两个扫描周期中相同(全为1或0),那么FN语句把RLO位清0。若CPU检测到输入I1.0有一个负跳沿,将使得输出Q4.0的线圈在一个扫描周期内通电。对输入I1.0常开触点扫描的RLO值(在本例中,此RLO正好与输入I1.0的信号状态相同)存放在存储位M1.0中。
在OB1的扫描周期中,CPU对I1.0信号状态扫描并形成RLO值,若该RLO值是0且存放在M1.0中的上次RLO值是1,这说明FN指令检测到一个RLO的负跳沿,那么FN指令把RLO位置1。如果RLO在相邻的两个扫描周期中相同(全为1或0),那么FN语句把RLO位清0。
l?上升沿信号识别指令?SIMATIC ET 200SP 安全电源模板 PPM ? 可实现安全应用和标准应用 ? 支持 PROFISAFE, 24V 直流 , 安全转换 和安全 F DQ ? 支持到 PL D/SIL2 或 PL E/SIL3 安全等级 ? 2 通道故障安全数字量输入和 1 故障安全数字量输出 PPM???????
若CPU检测到输入有一个正跳沿,将使得输出线圈在一个扫描周期内通电。对输入扫描的RLO值存放在存储位中。
在OB1的扫描周期中,CPU扫描并形成RLO值,若该RLO值是1且上次RLO值是0,这说明FN指令检测到一个RLO的正跳沿,那么FP指令把RLO位置1。如果RLO在相邻的两个扫描周期中相同(全为1或0),那么FP语句把RLO位清0。
例?3.1.14?
SIMATIC ET 200SP 故障安全继电器输出模块,1 通道 F- ST RQ ? 用于故障安全功能和标准功能的应用 ? DC24V/AC230V/5A,20MM 宽,1 点继电器输出 (2 NO- 触点 ) ? 总输出电流 5A,额定电压 24V 以及 AC 24 ... 230V ? 可支持到 PL E (ISO13849-1: 2008)/SIL 3 (IEC61508: 2010)
若CPU检测到输入I1.0有一个正跳沿,将使得输出Q4.0的线圈在一个扫描周期内通电。对输入I1.0常开触点扫描的RLO值(在本例中,此RLO正好与输入I1.0的信号状态相同)存放在存储位M1.0中。
在OB1的扫描周期中,CPU对I1.0信号状态扫描并形成RLO值,若该RLO值是1且存放在M1.0中的上次RLO值是0,这说明FN指令检测到一个RLO的正跳沿,那么FP指令把RLO位置1。如果RLO在相邻的两个扫描周期中相同(全为1或0),那么FP语句把RLO位清0
如果置位输入端为“1",复位输入端为“0",则触发器被置位。此后,即使置位输入端为0,触发器也保持置位不变。如果复位输入端为1,置位输入端为“0",则触发器被复位。
置位优先型RS触发器的R端在S端之上,当两个输入端都为1时,下面的置位输入端终有效。既置位输入优先,触发器被置位。
复位优先型SR触发器的S端在R端之上,当两个输入端都为1时,下面的复位输入端终有效。既复位输入优先,触发器被复位。
例?3.1.1???????? 直插式端子,接线无需工具,单手可完成接线 ? 可选的彩色端子标签方便接线,指示更加明晰 运行中更换模块不会影响到接线 ? 模块空缺运行(模块可以不插) ? 自动机械编码,可以防止插错模块 ? 更好的电磁兼容性源于 - 自动连接的屏蔽的背板总线 - 带有屏蔽的多层电路板保证信号不受干扰 - 体积小,安装方便的屏蔽套件 ? 自动连接的电势组,无需额外接线和跳线 ? 端子盒可以拆卸 ? 并排连接的基座单元具有良好的机械特性 ? 可选的彩色端子标签,根据 CC 彩色编码????
如果输入信号?I 0.0 = 1, I 0.0 = 0,?则M 0.0被复位,Q 4.0 = 0;
??标签条(长条形) 可以用于接口模块,总线适配器,I/O模块和基座单元盖板 参考标识牌 ? 用于标识 ET 200SP 组件(设备标识) ? 可以应用于接口模块,总线适配器,I/O模块和基座单元盖板 彩色端子标 ? 标识端子上的电压等级 ? 防止接线错误?????????
如果输入信号?
输出不变;令根据RLO的值,来决定被寻址位的信号状态是否需要改变。若RLO的值为1,被寻址位的信号状态被置1或清0;若RLO是0,则被寻址位的信号保持原状态不变。对于置位操作,一旦RLO为1,则被寻址信号(输出信号)状态置1,即使RLO又变为0,输出仍保持为1;对于复位操作,一旦RLO为1,则被寻址信号(输出信号)状态置0,即使RLO又变为0,输出仍保持为0。
SIMATIC ET 200S 是一款防护等级为 IP20,具有丰富的信号模块,同时支持电机启动器,变频器,PROFIBUS 和 PROFINET 网络的分布式 IO 系统。该产品在烟草,汽车,钢铁和各 OEM 厂商得到了广泛的认可和应用。?
语句表STL表示的置位/复位指令
功能图FBD表示的位逻辑指
、实验目的
选用PLC时用户需要考虑以下因素:
1.用户存储器容量
PLC中用户存储器一般由用户程序存储器和数据存储器组成,小型PLC的用户存储器容量多为几K字节,而大型PLC可达到几M字节。
2.输入输出点数
输入输出的点数决定了PLC可控制的输入开关信号和输出开关信号的总体数量。
3.扫描速度
扫描速度通常指PLC扫描1 K字节用户程序所需的时间,一般以ms/K为单位。
4.编程指令的种类和功能
某种程度上用户程序所完成的控制功能受限于PLC指令的种类和功能。PLC指令的种类和功能越多,用户编程则越方便简单。
5.内部寄存器的配置和容量
