
6ES7214-2BD23-0XB8接线方式






6ES7214-2BD23-0XB8接线方式
实际上经过磁化后的转子及定子的小齿的位置关系,在此说明如下。 首先解释励磁,励磁就是指线圈通电时的状态。
● a相励磁
将 a 相励磁,会使得磁极磁化成 s 极,而其将与带有 n极磁性的 转子 1 的小齿互相吸引,并与带有s极磁性的转子 2 的小齿相斥, 于平衡后停止。此时,没有励磁的 b相磁极的小齿和带有 s极磁性 的转子 2 的小齿互相偏离 0.72°。以上是 a 相励磁时的定子和转子小齿的位置关系。

● b相励磁
其次由 a 相励磁转为 b 相励磁时,b 相磁极磁化成 n 极,与拥有 s极磁性的转子 2 互相吸引,而与拥有 n极磁性的转子 1 相斥。

也就是说,从 a 相励磁转换至 b 相励磁时,转子转动 0.72°。由此可知, 励磁相位随 a相→ b相→ c相→ d相→ e相→ a相依次转换,则步进电动机以每次 0.72°做正确的转动。同样的,希望作反方向转动时,只需将励磁顺序倒转,依照 a相→ e相→ d相→ c相→ b相→ a相励磁即可。
0.72°的高分辨率,是取决于定子和转子构造上的机械偏移量,所以不需要编码器等即可正确的定位。下图就5相步进每次的位移量是0.72°进行更详细的说明:

由于组定子正好与转子相对应吸引。就势必会导致第二组定子与对应的转子相偏离(定子与转子齿距一样,但是各自所在的2个圆不一样大)。而这个偏离值正好是齿距的十分之一。因此普通5相步进的步距角为:360°/50齿/10=0.72°
高分辨率5相步进的步距角为:360°/100齿/10=0.36°
另外,就停止精度而言, 会影响的只有定子与转子的加工精度、组装精度、及线圈的直流电阻的不同等而已,因此可获得 ±3 分(无负载时)的高停止精度。 实际上步进电动机是由驱动器来进行励磁相的转换,而励磁相的转换时机则是由输入驱动器的脉冲信号所进行。以上举的是 1相位励磁的例子,实际运转时,为有效利用线圈同时进行 4相或 5相励磁的
1、运转需要的三要素:控制器、驱动器、步进

以上三部分是运转必不可少的三部分。控制器又叫脉冲产生器,目前主要有、、运动板卡等等。
2、运转量与脉冲数的比例关系

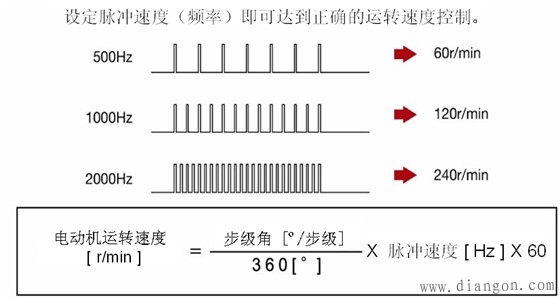
3、运转速度与脉冲速度的比例关系
4、本身具有保持力
步进电机只有在通电状况下,才具备自我保持力。在停电状况下 ,自我保持力消失。
因此在升降设备传动时,务必使用附电磁刹车型步进电机。
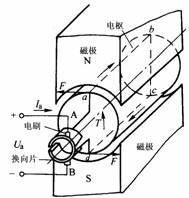
直流工作原理是建立在电磁力和电磁感应基础上的,是由于带电导体在磁场中受到电磁力的作用。如图所示直流电动机模型,它包括三个部分:固定的磁极、电枢、换向片与电刷。当将直流电压加到a、b两电刷之间,电流从a刷流人,从b刷流出,载流导体ab在磁场中受的作用力f按左手定则指向逆时针方向。同理,载流导体cd受到的作用力也是逆时针方向的。因此,转子在电磁转矩的作用下逆时针方向旋转起来。当电枢恰好转过90°时,电枢线圈处于中性面(此时线圈不切割磁力线),电磁转矩为零。但由于惯性的作用,电枢将继续转动,当电刷与换向片再次接触时,导体ab和cd交换了位置。因此,导体ab和cd中的电流方向改变了,这就保证了电枢可以连续转动。
从上面分析可知,要电磁转矩方向不变,导体从n极转到s极时,导体中的电流方向必须相应地改变,换向片与电刷即实现这一任务的机械式“换向装置”。
伺服系统如图1所示,是具有反馈的闭环自动控制系统。它由位置监测部分、误差放大部分、执行部分及被控对象组成。

图1:伺服驱动自控系统的组成
伺服系统必须具备可控性良好,稳定性高和响应快等基本性能。说明一下,可控性好是指讯号消失以后,能立即自行停转; 稳定性高是指转速随转矩的增加而匀速下降; 响应快是指反应快、灵敏、响态品质好。
通常根据伺服驱动机的种类来分类,有式、油压式或电气-油压式三种。
伺服系统若按功能来分,则有计量伺服和功率伺服系统;模拟伺服和功率伺服系统;位置伺服和加速度伺服系统等。
电气式伺服系统根据电气信号可分为dc直流伺服系统和ac交流伺服系统两大类。ac交流伺服系统又有异步电机伺服系统和同步电机伺服系统两种。
这里只讨论电气式伺服系统中的一种—交流永磁同步电机伺服系统。
伺服驱动系统能够忠实地跟随控制命令而动作,例如和工业机人,伺服驱动技术对产品的性能有重要影响,甚至起关键作用。故需进一步认识伺服驱动系统在其中的地位和作用。
该案例中客户想要实现两个功能, 一个是西门子PLC S7-200smart远程程序下载,另外还要实现西门子触摸屏Smart LINE 7100IE远程通信。华杰智控工业级4G路由器HJ8300具备3个LAN口和一个RS485或者RS232口, 下面的案例以华杰智控工业级4G路由器同时实现西门子PLC S7-200smart远程下载 和西门子触摸屏Smart line 7100IE远程控制
使用环境
1、PLC远程通信设备: 华杰智控工业级4G路由器HJ8300

2、西门子PLC S7-200 smart

3、西门子触摸屏Smart LINE 7100IE

4、华杰智控远程PLC管理软件smartbbbb

5、操作电脑64位
6、联通4G SIM卡一张
操作步骤如下:
二、实现远程控制的步骤
1. 配置华杰智控工业级4G路由器HJ8300。 把smartbbbb参数配置到HJ8300,使得HJ8300进入smartbbbb远程局域网,同时把西门子PLC S7-200 smart和西门子触摸屏smart LINE 7100IE 配置192.168.2段IP,然后接入到工业级4G路由器HJ8300的LAN口。插入SIM卡, 通电后, 工业级4G路由器HJ8300作为节点设备会进入smartbbbb远程局域网, 西门子PLC S7-200以及西门子触摸smart LINE 7100IE也会进入smartbbbb远程网络。

2、配置操作电脑 运行西门子PLC远程控制软件smartbbbb, 把电脑配置成服务器设备,点击启动后, 工业级4G路由器HJ8300会连接到服务器设备。

3. 检测smartbbbb网络 在电脑端,PING工业级4G路由器HJ8300, 能够PING通就说明smartbbbb远程局域网通道成功建立。

4、运行西门子软件,

5. 输入西门子PLC远程虚拟IP地址,

6. 成功实现西门子PLC远程连接,并进行数据通信





- 6ES7214-1AE30-0XB0 西门子S7-1200 CPU 1214C紧凑型数字输入输出模块
- 西门子CPU模块1214C DC/DC14输入/10输出,6ES7214-1HG40-0XB0
- 西门子CPU1214FC DC/DC/继电器14 输入/10输出6ES7214-1HF40-0XB0
- 西门子CPU模块1214C DC/DC/DC 14输入/10输出6ES7214-1AG40-0XB0
- 西门子S7-1200CPU1214C AC/DC4输入/10输出6ES7214-1BG40-0XB0
- 西门子S7-1200 6ES7214-1HG40-0XB0处理器模块紧凑型CPU 1214C
- 6ES7214-1BD23-0XB8 人机界面
- 西门子Siemens电源6ES7214-2BD23-0XB8 CPUPLC模块技术参数和供应
- 西门子控制器6ES7214-2AD23-0XB8
- 西门子控制器6ES7214-1BD23-0XB8