
西门子6ES7214-2BD23-0XB8供应现货









西门子6ES7214-2BD23-0XB8供应现货
1 引言
步进电机定位准确且与数字电路接口连接非常方便,无需反馈就可实现准确的角位移,在数控机床等许多领域中得到了广泛应用。随着电子技术的发展,对步进电机细分控制技术的研究日趋深入,该技术不仅解决了步进电机步距角大的问题,提高了步进电机的分辨率,减弱或消除了步进电机的低频振动,而且也改善了电机的其他性能。从而使步进电机的应用范围进一步扩大,控制更加灵活。
2 步进电机细分驱动的基本原理
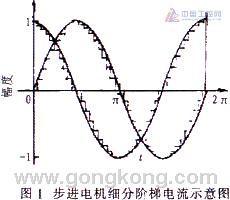
步进电机的细分功能采用数/模转换技术,用阶梯波驱动代替传统的方波驱动,使电机能以微步距“连续运动”。具体办法一般为:微处理器接收步进信号的输入,经内部识别处理后,查表得到电机的驱动电流大小。并将这个数值与当前步进电机的工作电流比较,满足条件电流通,不满足则断。由此得到用来控制步进电机细分的正弦波阶梯电流信号,经驱动系统的驱动,使步进电机的相电流按近似正弦波的波形变化,使得电机平稳运转,示意图如图1所示。
3 MC56F8323简介
DSP处理器采用Freescale公司的MC56F8323,56F8300系列被称为“合成控制器”,其含义是该器件采用的是结合了DSP与MCU功能的56800E内核。MC56F8323内核中保留了常用和有用的DSP和MCU指令集,简化了编程难度,允许习惯于MCU的设计工程师采用C编译器进行编程,简化了其DSP代码的编译。MC56F8323内部总线结构是一种经过改进的哈佛架构,拥有7条内部程序总线和数据总线,其中2条为32位宽;内部的数据RAM具有两个端口,因此可在单个周期中进行两次存取。这些特性对于处理器的处理控制能力非常重要。
4 硬件系统设计
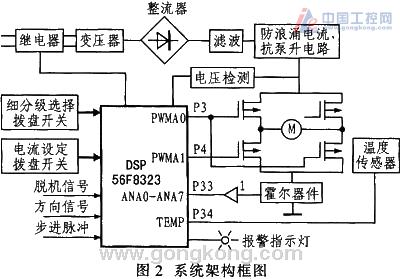
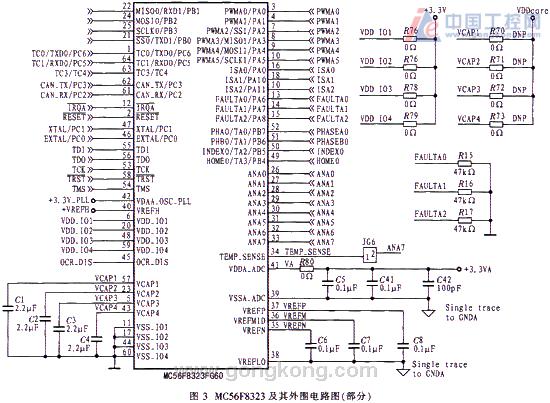
如图2所示,步进电机细分驱动模块主要由变压器、整流器、MC56F8323、MOSFET桥、电流检测、保护电路等组成。MOSFET桥的开断采用PWM控制,与MC56F8323的PWM模块相连(P3、P4);细分级选择拨盘开关、电流设置开关、各控制信号与MC56F8323的GPIO相连。MC56F8323及其外围电路图如图3所示。
5 软件设计
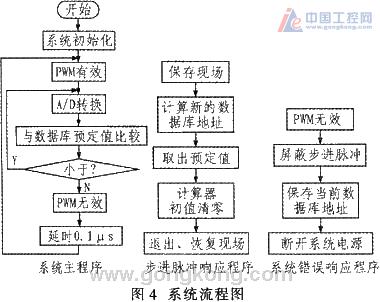
系统软件流程如图4所示。模块上电后,系统初始化,MC56F8323检测电机运转方向设置,当MC56F8323接收到步进脉冲信号时,在预先存储的数据库中查找出相应相位的电流值,MC56F8323内置的PWM控制器输出脉冲信号,开启对应的MOSFET功率管,使电机朝设定方向运转;电枢电流流经霍尔器件,产生与电枢电流成比例的电流值,此电流值经过I/V转换放大,输入MC56F8323的A/D转换器输入端,将转换结果与数据库中对应相位的预定值比较,如果电枢电流小于预定值,PWM继续有效,MOSFET导通;若电枢电流大于预定值,PWM无效,MOSFET断开;延迟一段时间后,PWM重新有效,系统继续对电枢电流进行检测,如此反复,直到下一个步进脉冲到来,系统从数据库中查找出新的预定电流值,转换结果将与此值作比较,输出对应的PWM,控制MOSFET的工作状态。
其他附加功能实现分别如下:通过控制I/V转换器的放大倍数,达到电流可调的目的;系统每接收到步进脉冲,计数器开始计数,新的步进脉冲清零计数器初值,当计数器计数达到0.1 s,自动将电机当前电流值减半,进入半电流省电工作模式,便于下次启动;系统试机功能采用MC56F8323片内计数器分频输出的10 kHz脉冲信号作为步进脉冲,控制系统运行,以检查系统的工作状况;相位记忆功能使DSP记住数据库访问的当前位置,下次步进脉冲将从当前位置向下、向上取得新的各相电流预定值。
保护功能实现如下:通过对母线电压分压取样,放大后,通过窗口比较器,如果发现高于预定高值或低于预定低值,向MC56F8323发出中断请求,MC56F8323立即响应中断请求,屏蔽步进脉冲输入,关闭系统总电源,实现过压、欠压保护功能;将两相电流值相加,如果大于预定值,说明流经电机电流过大,电机负载过重,则屏蔽步进脉冲输入,关闭电源,实现过流、过载保护;防浪涌电流、泵升抑制电路采用全硬件方式实现,提高反应速度。
6 结束语
本系统设计基本实现了一个包括过压、欠压、过流、过载、过热、断(缺)相、防浪涌电流、泵升电压抑制等功能的步进电机高速细分模块方案,实现了步进电机的高速jingque控制,同时也附加了完整的保护系统,扩展了步进电机的应用领域,延长了电机的使用寿命,具有广阔的应用空间和市场前景。
步进电机区别于其他控制用途电机的大特点是,它可接受数字控制信号(电脉冲信号)并转化成与之相对应的角位移或直线位移,因而本身就是一个完成数字模拟转化的执行元件。
而且它能进行开环位置控制,输入一个脉冲信号就得到一个规定的位置增量。这样的增量位置控制系统与传统的直流伺服系统相比,其成本明显降低,几乎不必进行系统调整。因此,步进电机广泛应用于数控机床、机器人、遥控、航天等领域,特别是微型计算机和微电子技术的发展,使步进电机获得更为广泛的应用。
步进电机的速度特性
步进电机的转速取决于脉冲频率、转子齿数和拍数。其角速度与脉冲频率成正比,而且在时间上与脉冲同步。因而在转子齿数和运行拍数一定的情况下,只要控制脉冲频率即可获得所需速度。由于步进电机是借助它的同步转矩而启动的,为了不发生失步,启动频率是不高的。特别是随着功率的增加,转子直径增大,惯量增大,启动频率和高运行频率可能相差10倍之多。
为了充分发挥电机的快速性能,通常使电机在低于启动频率下启动,然后逐步增加脉冲频率直到所希望的速度,所选择的变化速率要保证电机不发生失步,并尽量缩短启动加速时间。为了保证电机的定位精度,在停止以前必须使电机从高速度逐步减小脉冲率降到能够停止的速度(等于或稍大于启动速度)。因此,步进电机拖动负载高速移动一定距离并jingque定位时,一般来说都应包括“启动-加速-高速运行(匀速)-减速-停止”五个阶段,速度特性通常为梯形,如果移动的距离很短则为三角形速度特性,如图1所示。

图1 步进电机的速度曲线
步进电机控制系统结构
PC机在适当的时刻通过对硬件控制电路上的8253计数器0赋初值,设置好加减速过程的频率变化(即速度、加速度变化),以防止失步。例如,在点位控制中设置好速度曲线图,在起动和升速时,使步进电机产生足够的转矩驱动负载,跟上规定的速度和加速度;在减速时,下降特性使负载不产生过冲,停止在规定的位置。硬件控制电路板上的8253产生脉冲方波作为中断信号源,启动细分驱动电路中的固化程序以产生一定频率的脉冲,经功率放大后驱动步进电机运动。步进电机运动方向的改变及启动和停止均由计算机控制硬件控制电路实现。

图2 步进电机控制系统
软件和硬件结合起来一起进行控制,具有电路简单、控制方便等优点。在这种控制中,微机软件占用的存储单元少,程序开发不受定时限制。只要外部中断允许,微机就能在电机的每一步之间自由地执行其他任务,以实现多台步进电机的运动控制。
定时器初值的确定
步进电机的实时控制运用PC机,脉冲方波的产生采用8253定时器,其计数器0工作于方式0以产生脉冲方波,计数器1工作于方式1起记数作用,8253计数器0的钟频由2MHz晶振提供。设计算机赋给8253计数器0的初值为D1,则产生的脉冲方波频率为f1=f0/D1,周期为T1=1/f1=D1/f0,D1=f0T1=f0/f1。其中,f1为启动频率,f0为晶振频率。
步进电机升降速数学模型
为使步进电机在运行中不出现失步现象,一般要求其高运行频率应小于(或等于)步进响应频率fs。在该频率下,步进电机可以任意启动、停止或反转而不发生失步现象。 步进电机升降速有两种驱动方式,即三角形与梯形驱动方式(见图1),而三角形驱动方式是梯形驱动的特例,因而我们只要研究梯形方式。电机的加速和减速是通过计算机不断地修改定时器初值来实现的。在电机加速阶段,从启动瞬时开始,每产生一个脉冲,定时器初值减小某一定值,则相应的脉冲周期减小,即脉冲频率增加;在减速阶段,定时器初值不断增加,则相应的脉冲周期增大,脉冲频率减小,对应梯形脉冲频率特性的减速阶段。该设计的关键是确定脉冲定时tn,脉冲时间间隔即脉冲周期Tn和脉冲频率fn。假设从启动瞬时开始计算脉冲数,加速阶段的脉冲数为n,并设启动瞬时为计时起点,定时器初值为D1,定时器初值的减量为△。从加速阶段的物理过程可知,个脉冲周期,即启动时的脉冲周期T1=D1/f0,t1=0。由于定时器初值的修改,第2个脉冲周期T2=(D1-△)/f0=T1-△/f0,脉冲定时t2=T1,则第n个脉冲的周期为:
Tn=T1-(n-1)△/f0 (1)
脉冲定时为:

(2)
脉冲频率为:
1/fn=Tn=T1-(n-1)△/f0 (3)
上式分别显示了脉冲数n与脉冲频率fn和时间tn的关系。令△/f0=δ,即加速阶段相邻两脉冲周期的减量,则上述公式简化为:
tn=(n-1)T1-(n-2)(n-1)δ/2 (4)
1/fn=T1-(n-1)δ (5)
联立(4)、(5),并简化fn与tn的关系,得出加速阶段的数学模型为:

(6)
其中,是常数,其值与定时器初值及定时器变化量有关,A=-δ, B=(2T1+δ)2,C=8δ。
加速阶段脉冲频率的变化为:

(7)
从(6)、(7)式可以看出,在加速阶段,脉冲频率不断升高,且加速度以二次函数增加。这种加速方法对步进电机运行十分有利,因为启动时,加速度平缓,一旦步进电机具有一定的速度,加速度增加很快。这样一方面使加速度平稳过渡,有利于提高机器的定位精度,另一方面可以缩短加速过程,提高快速性能。
对于减速阶段,按照与上述类似的分析方法,可以得出脉冲频率特性的表达方式为:

(8)

(9)
其中,A=-δ, B=(2T1-δ)2,C=8δ,T1为减速开始时脉冲周期,δ为减速阶段相邻两个脉冲周期的增量。由于T1>>δ,则B=4T12,由(8)、(9)式可以看出,脉冲频率在减速阶段不断下降,且加速度为负,值以二次函数减小。这种减速性能对步进电机同样有利,它使步进电机在减速时能够平稳地停止而没有冲击,提高了机器的定位精度。
,可以得出本设计的脉冲频率特性(见图3)。

图3 脉冲频率特性
实验及总结
该方法已经成功的应用于本人设计的智能运动控制单元,通过开发bbbbbbs环境下的控制软件,利用VC++设计良好的控制接口界面,方便地实现了运动方式、速度、加减速的选择和位置控制,具有一定程度的智能。该控制单元减少了PC机被占用时间,以便于在电机运行的同时去完成别的工作,从而实现了三台步进电机的加减速和速度及位置控制。并且利用了细分驱动电源,提高了步进精度和定位精度。
在自动控制过程中,一步一步按顺序驱动各个负载动作,称为顺序控制或过程步进型控制。这种控制过程,用继电器符号程序很难实现程序设计。如果用步进梯形指令来编程,就相对变得很简单。使用简单的编程器,根据说明机器工作状态转换的图形,就可以很容易地用这种指令来实现程序设计。
轴承加工中的大部分车床、磨床,都可以算是按顺序动作的,有些还对顺序有严格的要求。我们仅以3MZ1310内沟磨床为例,来看一看是怎样用步进梯形指令实现它的顺序控制的。
这种方法的具体作法是,先根据机床的动作顺序和工艺要求画出状态转换图,然后根据状态转换图,可一步写出程序,直接把指令输入PLC,方便又快捷。
我们采用的可编程控制器是三菱公司的MELSEC F1-40MR, 3MZ1310内沟磨床自动循环的状态转换方框图如图1。

其中,“S”是状态器,是用来存储继续工作过程的各种状态,以此来有序地控制机械设备的一种软器件。
根据上面的状态转换方框图,可以直接写出用步进梯形图表示的程序,直接输入程控器。如图2“

由于3MZ1310内沟磨床的手动操作部分和通用部分比较简单,不需要任何复杂的顺序控制,可以用常规继电器顺序方法设计,所以这里不再赘述。
从上面这个例子可以看出,步进梯形指令是一种很容易掌握的指令,使用方便,可以用它来进一步提高设计效率,容易实现调试运行。而且大大减少程序所需的步数,也能很容易地为第三者所理解。这种方法适用于机加工中要求顺序动作的各种机床

- 西门子CPU模块1214C DC/DC14输入/10输出,6ES7214-1HG40-0XB0
- 西门子CPU1214FC DC/DC/继电器14 输入/10输出6ES7214-1HF40-0XB0
- 西门子CPU模块1214C DC/DC/DC 14输入/10输出6ES7214-1AG40-0XB0
- 西门子S7-1200CPU1214C AC/DC4输入/10输出6ES7214-1BG40-0XB0
- 西门子S7-1200 6ES7214-1HG40-0XB0处理器模块紧凑型CPU 1214C
- 6ES7214-1BD23-0XB8 人机界面
- 西门子Siemens电源6ES7214-2BD23-0XB8 CPUPLC模块技术参数和供应
- 西门子控制器6ES7214-2AD23-0XB8
- 西门子控制器6ES7214-1BD23-0XB8
- 西门子控制器6ES7214-1AD23-0XB8