
西门子6ES7223-1HF22-0XA8大量库存







西门子6ES7223-1HF22-0XA8大量库存
直流伺服和交流伺服相似,可以采用控制器开环控制方式,控制器半闭环控制和全闭环控制系统。
直流伺服系统控制面板结构如下,面板右侧为与直流接口板的接口,包括电机驱动接口和编码器接口;左侧为与运动控制器面板的接口,包括位置控制模式接口和速度控制模式接口。

m+,m-信号为直流无刷伺服电机的线,用于驱动电机的运动。
a+,a-,b+,b-,c+,c-,5+,0v信号为编码器信号,用于反馈电机轴的实际位置。
a,/a,b,/b,c,/c,+5v,pul+,dir+,ognd,ovcc,gnd,dac,reset,alm,enable为与控制器相连的控制信号。
其含义为:
a,/a,b,/b,c,/c为驱动器反馈给运动器控制器的编码器信号。
+5v为电源。
pul+,pul-为脉冲信号,用于位置模式下的电机控制。
dir+,dir-为方向信号,用于位置模式下的电机控制。
ognd,ovcc,gnd分别为模拟地,模拟电源和数字地。
dac为驱动器接受的模拟控制信号,范围一般为-10v-10v。
reset,alm,enable为控制信号,分别表示驱动器的复位,报警以及使能功能。
直流伺服驱动器通常具有速度控制模式和位置控制模式。
采用位置模式时,输入控制信号为脉冲和方向(或是正负脉冲),采用速度模式时,输入控制信号为模拟量。驱动器将输入信号转化为速度控制信号,经过速度控制器转化为电流控制信号,电流信号通过pwm回路作用于功率扩大模块的输出模块,后施加给电机。

直流伺服驱动器采用idm只能伺服驱动器。
idm240/640是嵌入式智能、高精密、全数字化的伺服驱动器,可驱动方波或正弦波无刷伺服电机(pmsm),直流有伺服电机,通过can或rs-485接口可组成多达256个轴的分布式智能网络运动系统,嵌入的可编程运动语言(tml)提供各种运动控制和专用功能。
主要特点如下 :
分布式智能,单轴主控运行或从动轴模式
控制模式:位置,速度,转矩,电压,外部变量
运动模式:脉冲+方向,齿轮,profiling,contouring
可编程保护:位置误差,过流,过压或欠压,i2t,
dsp控制技术:基于motionchiptm 技术
rs232/485串行接口,波特率可达115kb
can2.0局域总线,兼容canopen,波特率可达1mhz
输出电流:连续电流5a/8a,峰值电流16a,
电源电压:12-48vdc(idm240) ,12-48vdc(逻辑电源)/80v(电机)(idm640)
紧凑结构设计:136 x 84.5 x 26 mm
控制软件采用easy motion studio,控制软件特点如下:
图形化评估分析编程工具easymotion studio平台快速设置电机、驱动器参数及编程运动程序,tml_lib函数库是智能化伺服驱动器在 pc上执行运动控制应用的一个函数库,在c/c++、basic、delphi、labview开发的应用程序中调用库中的.dll文件执行后,能直接与驱动器通信、设置参数、查询状态、传送命令、定义运动事件,测试输入输出口状态等。
starter kit for idm640:包含驱动器的完整组件,包括一个idm640驱动器,一个电机,一个i/o板,easymotion studio软件,以及应用程序的帮助和完整文件。是测试您的运动控制程序的理想实验平台。如上所述均包含在一个可立即运行、即插即用的组件中。

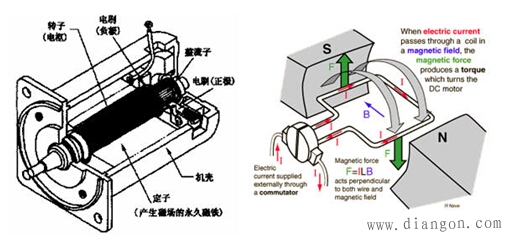
直流伺服电机包括如下组成部分:
定子:磁场—永磁体
转子:电枢绕组
换向:换向器与碳刷
加于直流电机的直流电源,借助于换向器和电刷的作用,使直流电机电枢线圈流过的电流,方向是交变的,从而使电枢产生的电磁转矩的方向恒定不变,确保直流电动朝确定的方向连续旋转。
直流伺服优点:
· jingque的速度控制
· 转矩速度特性很硬
· 原理简单、使用方便
· 价格优势
缺点:
· 电刷换向
· 速度限制
· 附加阻力
· 产生磨损微粒(对于无尘室)
目前,国内经济型步进驱动电路主要有以下几种:
1.单电压限流型驱动电路
单电压限流型驱动电路是步进电动机一相的驱动电路,l是电动机绕组,晶体管vt可以认为是一个无触点开关,它的理想工作状态应使电流流过绕组l的波形尽可能接近矩形波。但是由于电感线圈中的电流指数规律上升,其时间常数 ,须经过 的时间后才能达到稳态电流。
v在晶体管vt截止时起续流和保护作用,以防止晶体管截止瞬间绕组产生的反电势造成管子击穿,串联电阻rd使电流下降更快,从而使绕组电流波形后沿变陡。
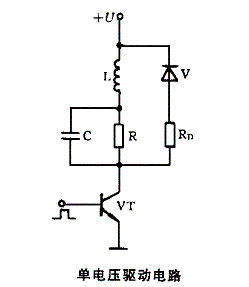
由于步进电动机绕组本身的电阻很小,所以,时间常数很大,从而严重影响电动机的启动频率。为了减小时间常数,在励磁绕组中串以电阻r,这样时间常数 就大大减小,缩短了绕组中电流上升的过度过程,从而tigao了工作速度。
在电阻r两端并联c,是由于电容上的电压不能突变,在绕组由截止到导通的瞬间,电压全部降落在绕组上,使电流上升更快,所以,电容c又称为加速电容。
这种电路的缺点是r上有功率消耗。为了tigao快速性,需加大r的阻值,随着阻值的加大,电源电压也势必tigao,功率消耗也进一步加大,正因为这样,单电压限流型驱动电路的使用受到了限制。
2.高低压切换型驱动电路
优点:功耗小,启动力矩大,突跳频率和工作频率高。
缺点:大功率管的数量要多用一倍,增加了驱动电源。
高低压切换型驱动电路的后一级如图 (a)所示,相应的电压电流波形图如图(b)所示。这种电路中采用高压和低压两种电压供电,一般高压大于60v,低压为5~20v。v1在vt1和vt2都截止时通过电源和v2为电机绕组提供放电回路。在t1-t2时间内。

vt1和vt2均饱和导通,+80v的高压电源经过vt1和vt2管加到步进电动机的绕组上,使其电流迅速上升,当时间到达t2时,或电流上升到某一数值时,ub2变为低电平,vt2截止,电动机绕组的电流由+12v电源经过vt1管来维持。
此时,电流下降到电动机的额定电流,直到t3时ub1也为低电平,vt1管截止,电动机绕组电流下降到0。一般电压ub1由脉冲分配经过几级放大获得,电压ub2由单稳定时或定流装置再经脉冲变压器获得。
3.pwm 型驱动电路
恒频脉宽调制功放电路基本上是把斩波恒流和斩波平滑功放电路的特点集于一身,功能更好。v1是20khz的方波,它作为各相d触发器的时钟信号cp,以保证各相以同样的频率进行斩波。v2是步进控制信号。
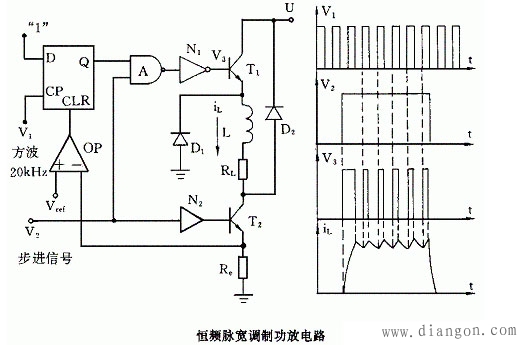
vref是比较器op的正输入端信号,它用于确定电机绕组电流il 的稳定值。恒频脉宽调制功率放大电路不但有较好高频特性,而且有效地减少了的噪声,同时还降低了功耗。因此体积也可以减少。但是由于斩波的频率较高,对功放管的要求也稍高。而这种电路的低频振荡也较高。
步进电动机的驱动电路实际上是一种脉冲放大电路,使脉冲具有一定的功率驱动能力。由于功率放大器的输出直接驱动电动机绕组,因此,功率放大电路的性能对步进电动机的运行性能影响很大。对驱动电路要求的核心问题则是如何tigao步进电动机的快速性和平稳性
由于直流伺服实际上就是一台小容量的他励直流电动机,因此,普通直流电动机的各种驱动模块实际上均可用来驱动直流伺服电动机。但是,一般而言,直流伺服电动机的容量远小于普通驱动用直流电动机,即电枢驱动容量较小,而普通直流电动机的驱动模块通常都是应用于中大容量的电动机作为驱动。另外,作为伺服电动机由于其控制的线性度、灵敏性和快速性等的特殊要求,对驱动模块的动静态特性也有相应的要求。因此,直流伺服电动机往往需要有自己专门的驱动模块。适用于直流伺服电动机的典型驱动电路实际上是一种直流线性功率放大器,它将直流控制信号直接进行电压和功率放大而驱动直流伺服电动机,如图1所示。因此,直流伺服电动机的驱动模块又叫做直流伺服放大模块。

(1)直流伺服电动机驱动模块的基本形式及原理
原理上,直流伺服电动机驱动模块也由功率电路和控制电路两部分构成。而功率电路原理上有两种基本形式,这两种基本形式分别叫电压控制型(dsmdrv)和电流控制型(dsmdrc)。
(2)用功率器件构成的驱动模块dsmdr
用功率电子器件可以构成一种带限流功能的电压控制型双向驱动模块,
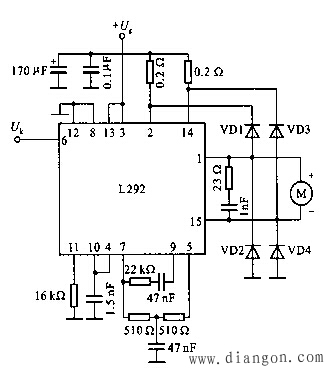
(3)用功率构成dsmdr驱动模块
由于直流伺服电动机通常是低电压小功率。因此,可以采用一些通用功率集成电路构成直流伺服放大器直接驱动直流伺服电动机。此外,目前市场上已有专用于驱动直流伺服电动机的专用功率集成电路。这种集成电路具有很大的输出电流能力且用它们构成直流伺服放大器非常简单和容易。

1.概述
恒压供水控制系统的基本控制策略是:采用电动机调速装置与可编程控制器(PLC)构成控制系统,进行优化控制泵组的调速运行,并自动调整泵组的运行台数,完成供水压力的闭环控制,在管网liuliang变化时达到稳定供水压力和节约电能的目的。系统的控制目标是泵站总管的出水压力,系统设定的给水压力值与反馈的总管压力实际值进行比较,其差值输入CPU运算处理后,发出控制指令,控制泵电动机的投运台数和运行变量泵电动机的转速,从而达到给水总管压力稳定在设定的压力值上。
着电力电子技术的发展,电力电子器件的理论研究和制造工艺水平的不断tigao,电力电子器件在容量、耐压、特性和类型等方面得到了很大的发展。进入90年代电力电子器件向着大容量、高频率、响应快、低损耗的方向发展。作为应用现代电力电子器件与微计算机技术有机结合的交流变频调速装置,随着产品的开发创新和推广应用,使得交流异步电动机调速领域发生一场巨大的技术革命。目前自动恒压供水系统应用的电动机调速装置均采用交流变频技术,而系统的控制装置采用PLC控制器,因PLC不仅可实现泵组、阀门的逻辑控制,并可完成系统的数字PID调节功能,可对系统中的各种运行参数、控制点的实时监控,并完成系统运行工况的CRT画面显示、故障报警及打印报表等功能。自动恒压供水系统具有标准的通讯接口,可与城市供水系统的上位机联网,实现城区供水系统的优化控制,为城市供水系统提供了现代化的调度、管理、监控及经济运行的手段。
2.控制方案
在住宅小区水厂的管网系统中,由于管网是封闭的,泵站供水的liuliang是由用户用水量决定的,泵站供水的压力以满足管网中压力不利点的压力损失ΔP和liuliangQ之间存在着如下关系:
ΔP=KQ2;
式中K—为系数
设PL为压力不利点所需的低压力,则泵站出口总管压力P应按下式关系供水,则可满足用户用水的要求压力值,又有佳的节能效果。
P=PL+ΔP=PL+ KQ2;
因此供水系统的设定压力应该根据liuliang的变化而不断修正设定值,这种恒压供水技术称为变量恒压供水,即供水系统不利点的供水压力为恒值而泵站出口总管压力连续可调。

典型的自动恒压供水系统的结构框图如图1所示;系统具有控制水泵出口总管压力恒定、变liuliang供水功能,系统通过安装在出水总管上的压力传感器、liuliang传感器,实时将压力、liuliang非电量信号转换为电信号,输入至可编程控制器(PLC)的输入模块,信号经CPU运算处理后与设定的信号进行比较运算,得出佳的运行工况参数,由系统的输出模块输出逻辑控制指令和变频器的频率设定值,控制泵站投运水泵的台数及变量泵的运行工况,并实现对每台水泵根据CPU指令实施软启动、软切换及变频运行。系统可根据用户用水量的变化,自动确定泵组的水泵的循环运行,以tigao系统的稳定性及供水的质量。
3.系统功能
该系统选用FR-500日本三菱变频器。该系统中具有功能:
3.1自动切换变频/工频运行功能
变频器提供三种不同的工作方式供用户选择:
方式0:基本工作方式。变频器始终固定驱动一台泵并实时根据其输出频率:控制其他辅助泵启停。即当变频器的输出频率达到大频率时启动一台辅助泵工频运行、当变频器的输出频率达到小频率时则停止后启动的辅助泵。由此控制增减工频运行泵的台数。
方式1:交替方式,变频器通常固定驱动某台泵,并实时根据其输出频率,使辅助泵工频运行,此方式与方式0不同之处在于若前一次泵启动的顺序是泵1→泵2,当变频器输出停止时,下一次启动顺序变为泵2→泵1。
方式2:直接方式。当启信号输入时变频器启动台泵当该泵达到高频率时,变频器将该泵切换到工频运行,变频器启动下一台泵变频运行,相反当泵停止条件成立时,先停止先启动的泵。
3.2 PID的调节功能
由压力传感器反馈的水压信号(4-20MA或-5V)直接送入PLC的A/D口(可以通过手持编程器),设定给定压力值,PID参数值,并通过PLC计算何以需切换泵的操作完成系统控制,系统参数在实际运行中调整,使系统控制响应趋于完整。
3.3“休眠”功能
系统运行时经常会遇到用户用水量较小或不用水(如夜晚)情况,为了节能,该系统专用设置了可以使水泵暂停工作的“休眠”功能,当变频器频率输出低于其下限时,变频器停止工作,2#、3#泵不工作,水泵停止(处于休眠状态)。当水压继续升高时将停止1泵,当水压下降到一定值时将先启动变频器运转2#泵或3#泵,当频率到达一定值后将启动1#泵调节2#或3#泵的转速。
“休眠值”变频器输出的下限频率PR507设置。
“休眠确认时间”用参数PR506设置,当变频器的输出频率低于休眠值的时间如小于休眠时间td时,即td<tn时变频器继续工作,当td>tn时变频器将进入休眠状态。
“唤醒值”由供水压力下限启动,当供水压力低于下限值时由PLC发出指令唤醒变频器工作。
经测试“休眠值”为10HZ。 “休眠确认时间”td:20s “唤醒值”70%
3.4通讯功能
该系统具有计算机的通讯功能,PLC变频器均提供有RS232或485接口PLC可选用西门子的S7-200计算机可以与一套或多套系统进行通讯,利用计算机同时可以监测:电流、电压、频率、转速、压力等也可以控制变频器的各类参数。
此外该系统还具有手动/自动操作,故障报警,运行状态,电流,电压、频率状态显示缺水保护等功能。
4.运行特征
以三台水泵的恒压供水系统为例,系统在自动运行方式下,可编程控制器控制变频器软启动1#泵,此时1#泵进入变频运行状态,其转速逐渐升高,当供水量Q<1/3Qmax时(Qmax为三台水泵全部工频运行时的大liuliang),可编程控制器CPU根据根据供水量的变化自动调节1#泵的运行转速,以保证所需的供水压力。当用水量Q在1/3Qmax,当外供水量减少至1/3Qmax
5.系统经济效益分析及系统优点
5.1经济效益分析
变量泵的功率N1、供水量Q1与泵转速n 1三者的关系如下式: N1/Q1=(n 1/n)3 Q1/Q= n 1/n 式中Q—额定liuliang,Q1
5.2系统优点
5.2.1恒压供水技术因采用变频器改变电动机电源频率,而达到调节水泵转速改变水泵出口压力,比靠调节阀门的控制水泵出口压力的方式,具有降低管道阻力大大减少截流损失的效能。
5.2.2由于变量泵工作在变频工况,在其出口liuliang小于额定liuliang时,泵转速降低,减少了轴承的磨损和发热,延长泵和电动机的机械使用寿命。
5.2.3因实现恒压自动控制,不需要操作人员频繁操作,降低了人员的劳动强度,节省了人力。
5.2.4水泵电动机采用软启动方式,按设定的加速时间加速,避免电动机启动时的电流冲击,对电网电压造成波动的影响,同时也避免了电动机突然加速造成泵系统的喘振。
5.2.5由于变量泵工作在变频工作状态,在其运行过程中其转速是由外供水量决定的,故系统在运行过程中可节约可观的电能,其经济效益是十分明显的。由于其节电效果明显,所以系统具有收回投资快,而长期受益,其产生的社会效益也是非常巨大。

- 西门子SB1223 数字量信号板模块6ES7223-3BD30-0XB0
- 西门子SB1223 数字量信号板查模块6ES7223-3AD30-0XB0
- 西门子SB1223数字量信号板模块6ES7223-0BD30-0XB0 2输入DC/2输出24V
- 西门子SM1223 数字量输入输出模块 8输入/8输出继电器6ES7223-1QH32-0XB0
- 西门子SM1223 数字量输入输出模块16输入/16输出24V 6ES7223-1BL32-0XB0
- 西门子SM1223 数字量输入输出模块8输入/8输出24V 6ES7223-1BH32-0XB0
- 西门子SM1223 数字量输入输出模块 8输入24V8输出继电器6ES7223-1PH32-0XB0
- S7-200西门子6ES7223-1PL22-0XA8数字量输入输出PLC控制器扩展模块
- 西门子CPU控制器6ES7223-1PM22-0XA8
- 西门子CPU控制器6ES7223-1BM22-0XA8