西门子6ES7223-1BM22-0XA8型号参数






西门子6ES7223-1BM22-0XA8型号参数
设计 CU310-2 控制单元标配了以下接口:
• 现场总线接口 - CU310-2 PN:1 个 PROFINET 接口带 2 个端口 (RJ45 插 口),采用 PROFIdrive V4 协议 - CU310-2 DP:1 个 PROFIBUS 接口,采用 PROFIdrive V4 协议
• 1 个 DRIVE-CLiQ 插座,用于与 DRIVE-CLiQ 电机或其他 DRIVE-CLiQ 节点 (例如,编码器模块或端子模块)的通讯
• 1 个编码器,可检测以下编码器信号 - 增量编码器 TTL/HTL - SSI 编码器,不带增量信号
• 1 个 PE / 保护接地线接口
• 1 个电子电源接口,通过 24-V DC 电源连接器连接
• 1 路温度传感器输入,用于 KTY84-130、 Pt1000 或者 PTC (Pt1000 从固件版本 V4.7 HF17 开始可用)
• 3 路可参数设置的故障安全 (V4.5 以上固件版本可用)数字量 输出 (电位隔离),或 6 路数字量输出 (电位隔离)可以对故 障安全数字量输入进行布线,即可以通过 PROFIsafe 连接到上 位控制器。
• 5 路可参数设置的数字量输入 (电位隔离)
• 1 路可参数设置的故障安全 (V4.5 以上版本固件可用)数字量 输出 (电位隔离),或 1 路数字量输入 (电位隔离)2)
• 8 路可设定的双向非隔离数字量输入 / 输出 2)
• 1 路模拟量输入,可选择 ±10 V (分辨率 12 位 + 符号)或 ±20 mA (11 位 + 符号)
• 1 个以太网接口 (RJ45 插座),用于调试和诊断
• 1 个 CF 卡插槽,固件和参数保存在该存储卡上
• 1 个 PM-IF 接口,用于和模块型功率模块通讯
• 3 个测试插座和一个参考接地,用于调试支持
• 1 个用于连接 BOP20 基本操作面板的接口 控制单元 CU310-2 的状态通过多色 LED 来显示。 基本操作面板 BOP20 可直接卡接在控制单元 CU310-2 上,例如 用于诊断。 固件和参数设置保存在插入式的 CF卡上,因此无需辅助工具便可 实现控制单元的更换。
控制单元 CU310-2 通过 PM-IF 接口控制模块型功率模块。 DRIVE-CLiQ 电机或编码器模块 (SMC) 也可连接到集成的 DRIVE-CLiQ 插座,以方便无 DRIVE-CLiQ 接口的电机的工作。
通过基本操作面板 BOP20 可直接在设备上修改参数。设备运行时 同样可将 BOP20 卡接到控制单元 CU310-2 上用于诊断。 控制单元 CU310-2 及其连接的组件的调试和诊断通过调试工具 STARTER进行。控制单元CU310-2需要一张固件版本为V4.4或更 高的 CF 卡。 控制单元CU310-2 PN按照PROFIdrive V4协议通过PROFINET IO 和上层控制系统进行通讯。 这样一来,配备控制单元 CU310-2 PN 的 SINAMICS S120 驱动 系统相当于一个 PROFINET-IO 设备,并具备以下功能:
• PROFINET IO 设备
• 全双工传输 100 Mbit/s
• 支持 PROFINET IO 实时通讯类别: - RT (Realtime,实时) - IRT(Isochronous Realtime,等时同步实时),小发送周期 250 μs
• 按照 PROFIdrive V4 作为 PROFINET IO 设备连接至控制系统
• 标准 TCP/IP 通信,用于支持通过调试工具 STARTER 进行配置 以及访问网络服务器
• 集成了基于 ERTEC-ASIC 的、带两个 RJ45 插座的 2 端口开关。 从而可实现无附加外部开关的拓扑 (直线形、星形、树 形)。 若需使用数字量输出,必须在 X124 端子上连接一个 24-V 电源。 运行控制单元CU310-2需要一张固件版本为V4.4或更高的CF卡。
在变频器领域,也存在着一些难以控制的东西。直到西门子功能强大的变频器问世之后,情况才有了改观。MICROMASTER 440 是专门针对与通常相比需要更加广泛的功能和更高动态响应的应用而设计的。这些矢量控制系统可确保*的高驱动性能,即使发生突然负载变化时也是如此。由于具有快速响应输入和定位减速斜坡,因此,甚至在不使用编码器的情况下也可以移动至目标位置。该变频器带有一个集成制动斩波器,即使在制动和短减速斜坡期间,也能以突出的精度工作。所有这些均可在 0.12 kW (0.16 HP) 直至 250 kW (350 HP) 的功率范围内实现
西门子CPU模块6ES7212-1AF40-0XB0
以下几点对网络的性能有极为重要的影响。几乎所有网络通信质量方面的问题都与未考虑到下列事项有关:
偏置电阻用于在复杂的环境下确保通信线上的电平在总线未被驱动时保持稳定;终端电阻用于吸收网络上的反射信号。一个完善的总线型网络必须在两端接偏置和终端电阻。
通信口 M 的等电位连接建议单独采用较粗的导线 ,而不要使用 PROFIBUS 的屏蔽层,因为此连接上可能有较大的电流,以致通信中断。
PROFIBUS 电缆的屏蔽层要尽量大面积接 PE。一个实用的做法是在靠近插头、接线端子处环剥外皮,用压箍将裸露的屏蔽层压紧在 PE 接地体上(如 PE 母排或良好接地的裸露金属安装板)。
通信线与动力线分开布线;紧贴金属板安装也能改善抗干扰力。驱动装置的输入/输出端要尽量采用滤波装置,并使用屏蔽电缆。
 在 MM 440 的包装内提供了终端偏置电阻元件,接线时可按说明书直接压在端子上。如果可能,可采用热缩管将此元件包裹,并适当固定
在 MM 440 的包装内提供了终端偏置电阻元件,接线时可按说明书直接压在端子上。如果可能,可采用热缩管将此元件包裹,并适当固定
问题:
如何使用MM440 上的定位功能?
解答:
MM440 现在支持一个简单的定位功能。要选择定位功能,参数P0500 (工艺过程的应用对象) 必须设置为 3。
在12/01发布的MM440 参数列表手册中,P2484 和P2488 的描述是错误的。
修改后的解释应为:
P2484 = 与用户选择的一个转角单位相对应的电机的主轴圈数
P2488 = 到“stop"位置所要求的距离或圈数(参见 P2484)
这在04/02发布的参数列表手册中是正确的。
应用示例:
旋转示例:
电机将材料缠绕到主轴上。一个传感器用于直径检测,以示主轴已缠满。
需要在变频器停车命令之后电动机主轴继续旋转200转,然后再停车,参数应设置为:
P2484 = 1 (主轴每转 1 个用户选择的转角单位)
P2488 = 200 转
距离示例:
电动机驱动一个螺杆,螺杆以0.01米/转的速度在平台上移动。
需要在变频器停车命令之后螺杆继续移动0.5米,然后停车。参数设置应为如下:
P2484 = 100 (每米间距 100 主轴转数)
P2488 = 0.5 (停止之前要行进的间距)
注意事项:
如果安装了一个变速箱,那么P248 和P2482 必须根据变速箱的输入和输出比率进行设置。
缺省情况下,变频器在频率低于1Hz时关断。建议当使用定位特征时,参数P2167 设置为0。
参数r2489用于显示自发出运行命令起主轴回转的次数。
定位特征的精度可以通过使用SLVC (P1300 = 20)来改进
AS-Interface 技术规范 2.0 的基本数据
AS-Interface 技术规范 2.0 描述了一种带有一个 AS-i 主站和zui多 31 个 AS-i 从站的现场总线系统。
每个 AS-i 从站具有zui多 4 点数字量输入和 4 点数字量输出。
在*扩展的情况下,所有输入/输出数据的完整传输需要zui长 5 ms 的循环时间。
AS-Interface 规范 2.1 的扩展
通过 AS-Interface 技术规范 2.1,可将网络站点的数目增加一倍,从 31 个增加到 62 个,如下所示:
标准从站继续占用一个 AS-i 地址 (1..31)。
具有扩展编址功能的从站可将一个地址划分为一个 A 地址 (1A...31A) 和一个 B 地址 (1B...31B)。因此,可将zui多 62 个 A/B 从站连接到一个 AS-i 网络。
可毫无问题地实现标准从站和 A/B 从站的混合运行。AS-i 主站将自动识别连接了哪种类型的从站。用户无需进行特殊调节。
AS-Interface 技术规范 V2.1 的另一个功能是集成的模拟量传输功能。无需使用任何特殊功能块,即可访问模拟量和数字量。
AS-Interface 规范 3.0 的扩展
通过 AS-Interface 技术规范 3.0,可连接将近 1000 点数字量输入/输出(行规 S-7.A.A:8DI/8DO 作为 A/B 从站)。
新规范也可选择对模拟从站进行扩展编址。
通过“快速模拟量行规"加速模拟量传输。
模拟量模块的可变运用:分辨率(12/14 位)和 1/2-通道能力的可选优化。
异步串行协议 100 bit/s 或 50 bit/s,双向。
AS-i 主站
为了能在 AS-Interface 网络上运行 A/B 从站,必须使用满足技术规范 2.1 的zui低要求的主站模块。
西门子的所有当前 AS-i 主站模块和 AS-i 连接器均支持 A/B 技术。
用于 S7-300/ET200M 的 AS-i 主站和所有 DP/AS-i 连接器和 IE/AS-i 连接器符合 AS-Interface 技术规范 3.0,并支持所有新从站和以前的从站
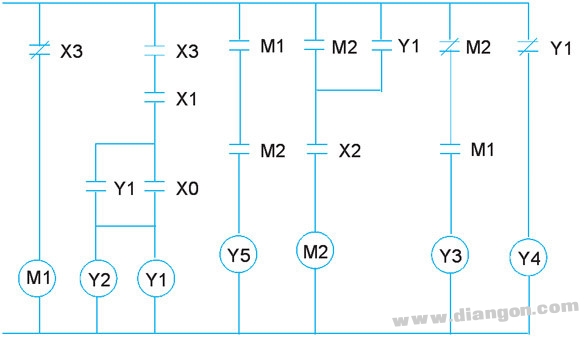
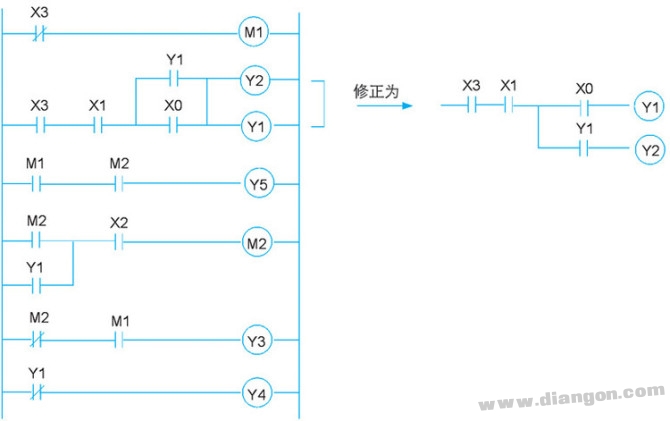
plc程序设计,一般均采用直觉法,也就是说它植基于电路设计者本身之学习经验,较为主观及直接。须经历一段瞎子摸象的尝试错误(try and error)时期,对程序进行除错之后才能符合所需功能或动作要求;因此设计出来的程序因人而异,除了原程序设计者之外,使用者或维修人员较不易理解其动作流程,亦即程序的可读性较低。但程序设计其实有些许脉络可循,祇是坊间的书籍很少提及这一部份。以下姑且抱着野人献曝的心情,以『三相感应电动机故障警报控制』电路为例,由传统电工图转换为阶梯图的过程,浅谈程序设计,相信尔后对于相关的回路转换或程序设计,您或许可触类旁通。
|