6ES7231-7PF22-0XA0选型手册






6ES7231-7PF22-0XA0选型手册
组态软件控制器
3.11 参数视图
PID 控制
66 功能手册, 11/2019, A5E35300232-AE
3.11.2.2 导航
在“参数视图"(Parameter view) 选项卡中,有以下替代导航结构可供选择。
导航 说明
功能导航
在功能导航中,参数结构以组态对话框(“功能视
图"(Functional view) 选项卡)、调试对话框和诊断对话框
中的结构为基础。
后一个组“其它参数"(Other parameters) 包括工艺对象
的所有其它参数。
数据导航
在数据导航中,参数结构以背景数据块/工艺数据块中的
结构为基础。
后一个组“其它参数"(Other parameters) 包括背景数据
块/工艺数据库中不包括的参数。
可以使用“选择导航结构"(Select navigation structure) 下拉列表来切换导航结构
参数表
下表给出了参数表各列的含义。 可以根据需要显示或隐藏列。
● “离线"列 = X: 该列在离线模式下可见。
● “在线"列 = X: 该列在在线模式下可见(在线连接到 CPU)
通过组态 SCL 来设置 ENO
要组态 SCL 编译器以设置 ENO,请按以下步骤操作:
1. 从“选项"(Options) 菜单中选择“设置"(Settings) 命令。
2. 展开“PLC 编程"(PLC programming) 属性并选择“SCL(结构化控制语言)"(SCL (Structured Cool Language))。
3. 选择“自动设置 ENO"(Set ENO automatically) 选项。
在程序代码中使用 ENO
您还能够通过将 ENO 分配给 PLC 变量或在局部块中评估 ENO 等方式在程序代码中使用 ENO。
示例:
Ret_Val 或 Status 参数对 ENO 的影响
某些指令(如通信指令或字符串转换指令)提供一个输出参数,其中包含有关指令处理的信息。 例如,某些指令提供通常为 Int 数据类型的 Ret_Val(返回值)参数,其中包含 -32768 到 +32767 范围内的状态信息。还有些指令提供通常为 Word 数据类型的 Status 参数,其中存储十六进制值 16#0000 到 16#FFFF 范围内的状态信息。 Ret_Val 或 Status 参数中存储的数字值确定该指令的 ENO 状态。
Ret_Val:介于 0 至 32767 的值通常设置 ENO = 1(即 TRUE)。 介于 ‑32768 至 ‑1 的值通常设置 ENO = 0(即 FALSE)。 要评估 Ret_Val,将表示法更改为十六进制。
Status:介于 16#0000 至 16#7FFF 的值通常设置 ENO = 1(即 TRUE)。 介于 16#8000 至 16#FFFF 的值通常设置 ENO = 0(即 FALSE)。
需要多次扫描才能执行的指令通常提供 Busy 参数 (Bool),用于表示指令处于活动状态,但尚未完成执行。 此类指令通常还提供 Done 参数 (Bool) 和 Error 参数 (Bool)。Done 表示指令已完成且无错误,而 Error 表示指令已完成,但存在错误情况
西门子模块6ES7513-1AL02-0AB0技术参数
监控表
监控表提供丰富的功能与诊断选件。通过它们可收集项目(以及不同设备)的不同变量。监控表可清晰地显示当前值,并可对这些值进行控制。存储的控制值表也可用来快速轻松地执行各种测试序列。
诊断和故障排除
诸如 MCC 编辑器中的“跟踪"(Trace) 等功能可使程序序列变得可见和易于理解(即使带有快速的命令转换时),并使诊断和故障排查变得更加清晰明了。程序打开后选项卡中的“交谈"(Talking) 图标将指示激活的状态或调试功能。
简便编程
在一般编程中,可通过添加功能而获得更高清晰度,例如,显示变量类型,存在在线连接时显示当前值,以及光标移过代码时提供特定语言的注释(“工具提示")。
在使用表格和输入字段时,弹出的提示将指示输入错误或缺少的系统信息。
系统内有效的用户输入自动填充机制(“自动填充")可自动更正大小写,可使编辑过程更加高效,使程序代码更容易阅读。
采用项目级查找/替换功能可以快速查找所需要的变量,必要时,还可替换该变量。过滤器启动后,带有多个复选框,可以按照需要收到或展开这些复选框。
这些功能可在全部语言的编辑器中使用,例如,“转至:下一使用位置、前一使用位置、声明或其它使用位置",可以高效地查找用到的变量。
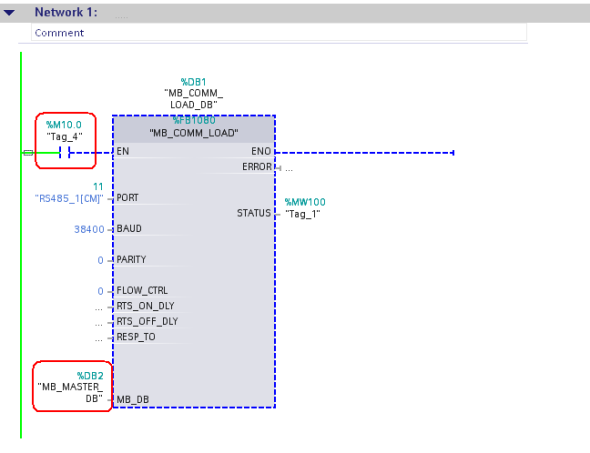
图13:MB_COMM_LOAD功能块的编程
PORT:指的是通过哪个通信模块进行MODBUS RTU通信。
BAUD:指的是和MODBUS子站进行通信的速率。
通信端口的波特率。取值范围为300,600,1200,2400,4800,9600,19200,38400,57600,
76800,115200。
注意:仪表PAC3200的波特率的设置范围:4800,9600,19200,38400。因此上S7-1200
的波特率的设置一定要和仪表PAC3200的波特率的设置相*。
MB_DB:对 MB_MASTER 或 MB_SLAVE 指令所使用的背景数据块的引用。 在用户程序中放置
MB_SLAVE 或 MB_MASTER 后,DB标识符会出现在 MB_DB 功能框连接的助手下拉列表中。
如“MB_MASTER_DB"或“MB_SLAVE_DB"。
STATUS:端口状态代码。具体含义如下表所示。
表4: MB_COMM_LOAD组态端口的状态代码
2.MODBUS_MASTER功能块的编程
MB_MASTER 功能块允许程序作为Modbus 主站使用点对点 (PtP, Point-to-Point) CM 1241 RS485 或 CM 1241RS232 模块上的端口进行通信。 可访问一个或多个 Modbus 从站设备中的数据。
MB_MASTER功能块的编程如下图所示。
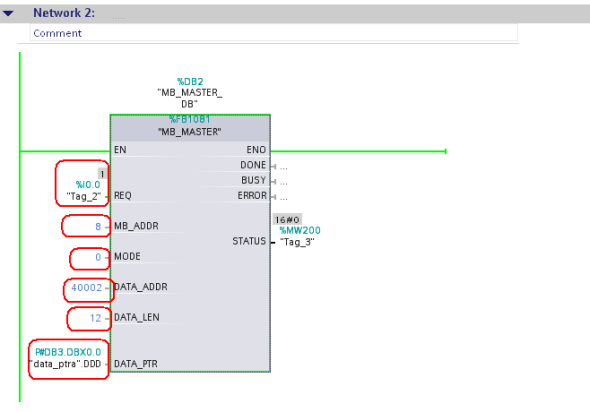
图14:MB_MASTER功能块的编程
REQ:数据发送请求信号。0-无请求。1-请求将数据传送到MODBUS从站。
MB_ADR:通信对象MODBUS从站的地址。有效地址范围为0-247。值 0 被保留用于将消息广播到所有 Modbus 从站。 只有Modbus 功能代码 05、06、15 和 16 是可用于广播的功能代码。
注意:此处MODBUS从站的地址一定要与仪表PAC3200 的MODBUS 地址相*。
MODE:模式选择。选择范围为:读、写、诊断。
DATA_ADDR:从站中的起始地址: 要在 Modbus 从站中访问的数据的起始地址。
工程软件
众所周知,在SIMATIC Manager的HW Config窗口,可组态配置当前所连接的硬件设备,包括硬件模块、通信连接等。如果组态有误的话,“Save and Compile”将无法通过。但在知识大爆炸的,如果还认为S7-300系列plc的过程映像区是固定的,那么您可能“OUT”了,以下的这则小故事或许对工程师有所益处。 点击“OK”时却弹出如下图所示的警告,提示设置的地址是无效的,并自动分配新的地址从128开始。
究竟是什么原因导致以上的现象呢?打开CPU313C的属性窗口,选中选项卡“Clock/Cycle Memory”,可看到当前CPU的输入/输出IO映像区范围默认是128个字节,如下图所示:
32点的DO模块需要占用4个字节,本体的DO输出地址是124-125,如果保持地址连续的话,DO模块的地址应为126-129,此时已经超过默认的过程映像区128。对于一个数字量模块而言,其输出地址不能“跨越”过程映像,即一部分地址位于过程映像区内而一部分地址在过程映像区外。如果要保持数字量输出地址连续,可将图3的IO映像区范围改大如256,如下图所示。如果没有地址一致的要求,可选择建议的起始地址128,这样的话DO模块的地址为128-131。
并不是所有PLC都支持修改过程映像区,可通过以下两种方式来确认:查看PLC的技术规范以确认是否支持过程映像区扩展,或者通过西门子中国的“产品支持”窗口来查看相关PLC的技术数据。俗话说“日日行不怕千万里”,及时了解并掌握PLC的新特性何尝不是日日行,只要坚持每日都向前,又怎会惧怕千万里的路途。 |




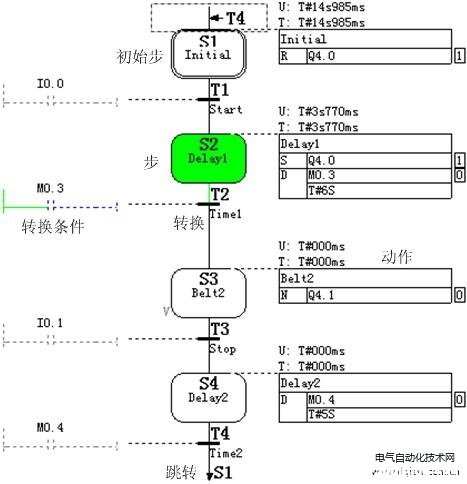
西门子plc的顺序控制设计法基本的思想是将系统的一个工作周期划分为若干个顺序相连的阶段,这些阶段称为步(Step)。顺序功能图(SFC)主要由步、有向连线、转换、转换条件和动作组成。
图1
图2 |