
6ES7222-1EF22-0XA0详细使用






6ES7222-1EF22-0XA0详细使用
中低端紧凑型控制器
大规模集成,节省空间,功能强大
具有出色的实时性能和功能强大的通信选件:
带有集成 PROFINET IO 接口的控制器,可与 SIMATIC 控制器、HMI、编程设备和其它自动化组件进行通信
所有 CPU 都可用于单机模式、网络以及分布式结构
安装、编程和操作极为简便
集成式 Web 服务器,带有标准和用户特定 Web 页面
数据记录功能,用于归档用户程序的运行数据
强大的集成工艺功能,如计数、测量、闭环控制和运动控制
集成数字量和模拟量输入/输出
灵活的扩展设备
可直接用于控制器的信号板卡
可通过 I/O 通道对控制器进行扩展的信号模块
附件,如电源、开关模块或 SIMATIC 存储卡等
应用
SIMATIC S7-1200 控制器用于处理机械设备制造和工厂建造中的开环和闭环控制任务。
由于具有模块化的紧凑型设计,同时又具有高性能,SIMATIC S7-1200 适用于广泛的自动化应用。其应用范围从取代继电器和接触器,一直延伸到网络中以及分布式结构内的复杂自动化任务。
S7-1200 在先前出于经济原因而开发电子装置的领域中日益得到应用。
例如,应用的例子包括:
贴片系统
传送带系统
电梯和自动扶梯
物料输送设备
金属加工机械
包装机械
印刷机械
纺织机械
混合系统
淡水处理厂
污水处理厂
外置显示器
配电站
室温控制
加热/冷却系统控制
能源管理
消防系统
空调
照明控制
泵控制
安防/门禁系统

设计
SIMATIC S7-1200 系列包括以下模块:
性能分级的不同型号紧凑型控制器,以及丰富的交/直流控制器。
各种信号板卡(模拟量和数字量),用于在 CPU 上进行经济的模块化控制器扩展,同时节省安装空间。
各种数字量和模拟量信号模块。
各种通信模块和处理器。
带 4 个端口的以太网交换机,用于实现各种网络拓扑
SIWAREX 称重系统终端模块
PS 1207 稳压电源装置,电源电压 115/230 V AC,额定电压 24 VDC
机械特性
坚固、紧凑的塑料机壳
连接和控制部件易于接触,并由前盖板提供保护
模拟量或数字量扩展模块也具有可拆卸的连接端子
设备特性
标准:
SIMATIC S7-1200 符合 VDE、UL、CSA 和 FM(I 类,类别 2;危险区组别 A、B、C 和 D,T4A)。生产质量管理体系已按照 ISO 9001 进行认证。
通信
SIMATIC S7-1200 支持各种通信机制:
集成 PROFINET IO 控制器接口
带 PROFIBUS DP 主站接口的通信模块
带 PROFIBUS DP 从站接口的通信模块
GPRS 模块,用于连接进行通信。
通信处理器,可通过以太网接口连接到 TeleControl Server Basic 控制中心软件,并借助于基于 IP 的网络进行安全通信。
通信处理器,可连接到服务应用的控制中心。
RF120C,可连接到 SIMATIC Ident 系统。
模块 SM1278,用于连接 IO-Link 传感器和执行器。
通过通信模块实现点到点连接。
PROFINET 接口
通过集成 PROFINET 接口,可与以下设备通信:
编程设备
HMI 设备
其它 SIMATIC 控制器
PROFINET IO 自动化组件
支持以下协议:
TCP/IP
ISO-on-TCP
S7 通信
可连接以下设备:
通过标准 5 类电缆连接现场编程器和 PC。
在编程器和 SIMATIC S7-1200 的 CPU 之间建立连接
SIMATIC HMI 精简面板
在精简面板和 SIMATIC S7-1200 的 CPU 之间建立连接
其它 SIMATIC S7-1200 控制器
通过 CSM 1277 以太网交换机连接多台设备
点到点接口,可自由编程的接口模式
通信模块可通过点到点连接进行通信。采用 RS232 和 RS485 物理传输介质。在 CPU 的“自由口 (Freeport)"模式下进行数据传输。采用面向位的用户特定通信协议(例如,ASCII 协议、USS 或 Modbus)。
可以连接任何具有串行接口的终端设备,如驱动、打印机、条码读码器、调制解调器等
为了避免其他外围设备的电干扰,可编程控制器应尽可能远离高压电源线和高压设备,可编程控制器与高压设备和电源线之间应留出至少200mm的距离。
西门子电源模块6EP1332-1LB00
当可编程控制器垂直安装时,要严防导线头、铁屑等从通风窗掉入可编程控制器内部,造成印刷电路板短路,使其不能正常工作甚
借助自动化工程组态,使用S7-300,可以更加方便地接入现代化的信息技术世界。使用CP 343-1Advanced,可以实现以下信息技术功能:
IP 路由;
借助IP访问列表,将IP V4报文以不低于Gigabit的速度转发至受控PROFINET接口。
WEB 服务器;
使用标准浏览器,可以浏览大至30 MB可自由定义的HTML网页;通过FTP处理自己的文件系统中的数据
标准诊断页;
无需额外工具,就可以在工厂内完成插装在安装机架上的所有模块的快速诊断工作。
直接从用户程序中发送认证电子邮件。电子邮件客户端设计有通知功能,可以在控制程序中直接通知用户。
通过 FTP 进行通讯;
大多数操作系统平台都可以使用的开放协议
设计有30 MB RAM文件系统,可以用作动态数据的中间存储器。
S7-300 PROFINET CPU集成有Web服务器。因此,标准Web浏览器可以读出S7-300站中的信息:
CPU 一般信息
诊断缓冲区的内容
变量表
标签状态
模块的状态
报文
工业以太网的相关信息
PROFINET 节点的拓扑结构
等时模式
使用系统功能“同步模式",可以同步耦合
分布式信号采集、
PROFIBUS 信号传输和
程序执行
总线周期时间的程序运行。
创建了自动化解决方案,可以以固定间隔时间(常量总线周期时间)捕捉并处理输入和输出信号。同时创建了前后一致的部分过程图像。
借助常量总线周期时间和分布式I/O同步信号处理技术,S7-300确保可以地重现规定的过程响应时间。
为同步模式系统功能提供了极为丰富的支持组件,可以处理运动控制、测量值采集和高速控制等领域的苛刻任务。
RFID 系统 SIMATIC RF200是一种紧凑型低成本读写器,尤其适合在工业生产中的小型装配线和内部物流系统中使用。
通过 RF200,可极为经济有效地实现 HF 范围(13.56 MHz,ISO 15693)内的中等性能识别任务。SIMATICRF200 读写器可使用所有 ISO15693 电子标签。
可以使用可用于所有 MOBY 和 SIMATIC RF 系统(ASM 456、ASM 475、SIMATICRF1xxC)的通信模块来连接到 SIMATIC S7、PROFIBUS、PROFINET、EtherNet/IP 和 TCP/IP(XML)。
IO-Link
对于简单的识别任务(例如,读取标识号),SIMATIC RF210R/RF220R//RF240R/RF250R/RF260R读写器可供货带有 IO-Link接口的型号产品。借助此标准化接口,可以将读写器自动读取的数据简单而经济地集成到自动化级系统中。通过一个合适的 IO-Link主站模块,SIMATIC RF200 读写器可以连接至提供自动化解决方案的许多制造商的 PLC 上。西门子提供用于S7-1200、S7-1500、ET 200S、ET 200SP、ET 200AL、ET200pro 和 ET200eco PN 的 IO-Link 主站模块通过该主站模块,可将 IO-Link 无缝集成到已有的 PROFINET 和PROFIBUS 现场总线以及全集成自动化 (TIAPortal) 系统中。
西门子主站模块都可以多连接八个 SIMATIC RF200 IO-Link 读写器。
IO-Link 具有如下出色特性:
易于使用:无需 RFID 特定的编程,是 RFID 初学者的理想产品。
每个读取点的通道成本非常低(读写器 + IO-Link 主站接口)。
通过标准化实现开放性:许多制造商都提供 IO-Link 主站。
SIMATIC RF200 识别系统具有以下功能:
13.56 MHz 工作频率(工作原理符合 ISO 15693)。
无源(不带电池)、免维护的电子标签 (MDS Dxxx),存储容量高达 8 KB FRAM。
坚固耐用的紧凑型部件,防护等级为 IP67。
易于集成在 SIMATIC、PROFIBUS、PROFINET 和 TCP/IP 中。
带有 RS422、RS232 或 IO-Link 接口的读写器
1控制性能监控功能块CPM
控制性能监控功能块(CPM)是PCS7 V7.0版本之后推出的一款用于监控控制回路性能的功能块,它可以评估控制回路当前自动调节的能力。更重要的是,它能够监视控制回路的控制性能(CPI)。通过观察CPI及相应参数,工厂操作员可以直观的发现控制回路性能的变化,提早采取措施来预防自动控制回路的控制性能降低。
1.1 为何需要使用CPM功能块
CPM功能块可以通过监控和统计控制回路的数据,计算出控制回路的动态特性和稳态特性,以数据的方式帮助操作人员直观的分析控制回路的控制性能,帮助维护人员及时的发现控制回路参数的失配或现场控制设备控制性能的衰减,起到提早预防自动控制失效等故障情况的出现。
CPM 可以长期的监控控制回路的性能,并计算出:
• 稳态特性:当控制回路的工作点(设定值SP)不发生改变时,CPM功能块监控控制回路的稳态特性,包括:
- 被控变量(PV)的平均值,方差和被控变量的标准差;
- 控制变量(MV)的平均值和控制方差;
- 评估控制回路的稳态过程增益。
• 动态特性:当控制回路的工作点(设定值SP)变化,控制回路做出阶跃响应时,CPM功能块监控控制回路的动态特性,包括:
--- 控制回路的响应和稳定时间,衰减比;
--- 超调量。
合理的应用CPM功能块可以帮助我们分析下列问题:
• 哪些控制回路可以投入闭环控制;
• 哪些控制回路没有正常工作;
• 哪些控制回路应该进行优化;
• 哪些现场控制设备可能需要进行维护。
1.2 CPM功能块工作原理
CPM功能块动态的统计、计算和评估控制回路的设定(SP),被控量(PV)和控制量(MV)。并根据这些数据计算出这个控制回路的控制性能指标(CPI)。工作原理如下图:
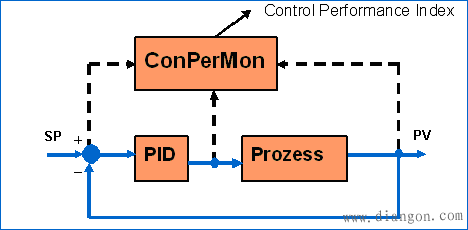
图1-1 CPM功能图
CPM功能块会根据当期控制回路的状态来分析不同的性能指标。比如:当控制回路的工作点是一个稳定数值(SP不变),CPM会根据控制量和被控量的方差、平均值等来评估控制回路的稳态特性。当控制回路的工作点发生改变(SP出现阶跃),即当前的主要控制目标是让被控量快速、准确和稳定的切换到新的工作点。这个时候CPM就通过统计并计算控制回路的超调,衰减比和稳定时间等来评估控制回路的动态特性。
当控制回路出现故障的时候,比如偏差超出设定上限时。CPM会在上位运行画面中产生相应的报警信息。
2 CPM功能组态
2.1 CPM安装
从PCS 7 V7.0 SP1 开始,PCS 7就集成了CPM功能块,不需要额外安装。在不同版本的PCS 7 下CPM功能块在不同的库中。以下为各版本PCS 7 CPM功能块所在的库:
• PCS 7 V7.0 :APC Library;
• PCS 7 V7.1 :Standard Library;
• PCS 7 V8.0 :AP Library。
2.2 CPM组态
一个CPM功能块对应一个PID 功能块使用。在CPM功能块的命名上,需要注意必须要与对应的PID功能块名称一致。比如,PID功能块名称为“TIC1101”,那么CPM功能块的名称就必须是“TIC1001_cpm”。如果不遵循这种命名方式,在上位监控画面中,CPM的操作面板就无法自动的加载与这个控制回路相关的趋势。
2.2.1 程序组态
CPM功能块的组态步骤:
打开CFC 编辑器,从功能库中拖入PID功能块,并且将该功能块声明为下一个功能块的插入点,确保PID功能块和CPM功能块的执行顺序。
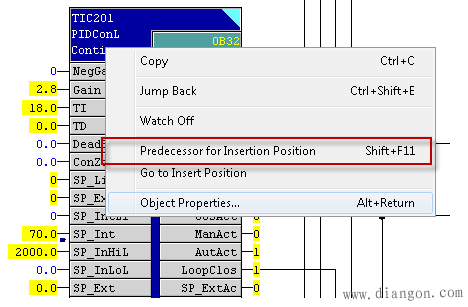
图2-1 指定插入位置
由于“PIDConL”功能块在两个OB中均有调用,所以还需要指定在哪个OB块下定义为插入点(如下图):
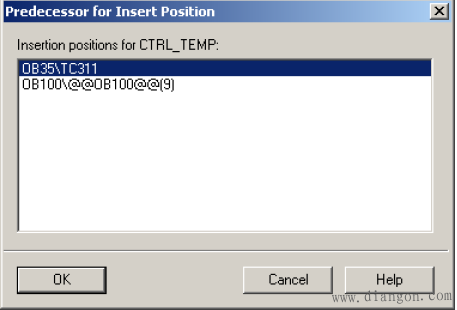
图2-2 指定OB
从库中拖入CPM功能块,并根据PID功能块的名字命名:
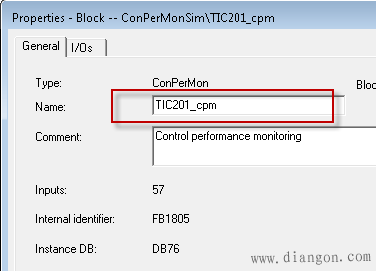
图2-3 CPM功能块命名
连接PID功能块和CPM功能块,引脚连接见如下表格。
表2-1 PCS 7 V7.0与PCS 7 V7.1 CPM功能块连线

表2-2 PCS 7 V8.0 CPM功能块

2.2.2 OS 组态
在AS部分完成CPM组态后,仅需要编译OS就可以在画面中使用CPM功能,无需额外组态。画面中会分别生成PID和CPM两个功能块的块图标,PID操作面板上集成有按钮可以快捷打开CPM的操作面板。
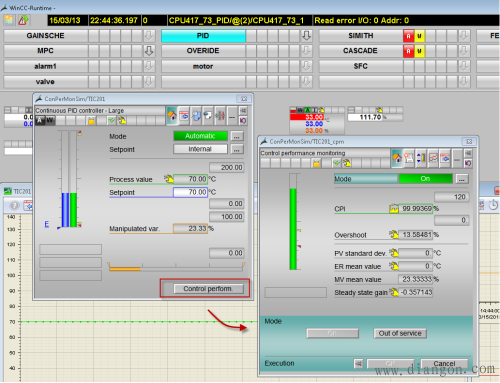
图2-4 通过PID面板打开CPM面板
3 CPM功能使用步骤
本节以组态一个单回路闭环控制(PID)为例,介绍如何组态、激活和评估CPM功能块。示例组态流程均基于PCS 7 V8.0 Update 1版本。
3.1 CPM组态
从“PCS 7 AP Library V80 – Control ”中拖出ConPerMon(FB1805)和PIDConL(FB1874),分别命名为TIC201和TIC201_cpm。CPM功能块需要获取所监视的PID回路的PV、SP和MV,并通过“Loopclose”引脚来获得当前控制回路的开环、闭环状态,并将评估结果通过CPI引脚返回给PID功能块,并将数值显示到PID的控制面板上。引脚连接方式见下图:
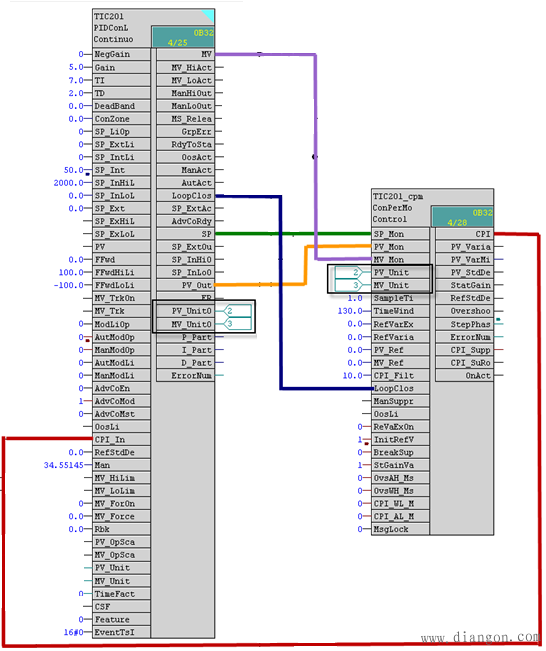
图3-1 CFC中的程序组态
组态完成后分别进行AS编译、下载和OS编译,相应层级画面上会生成相应的PID功能块和CPM功能块的图标,PID功能块的操作面板上有按钮可以快捷打开对应CPM功能块面板。
3.2 整定PID
通过CPM监控回路的动态特性,评估回路PID参数设置是否合理
CPM功能块可以评估回路的动态特性,动态特性是指当控制回路的设定值发生阶跃变化的时候,被控变量能否快速、准确和稳定地做出响应。这个特性反映出了P(比例增益)、I(积分时间)和D(微分时间)这三个参数的设置是否合理。
下图为一个典型的阶跃响应曲线图:
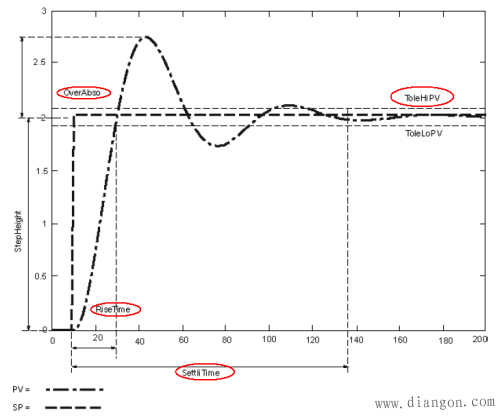
图3-2 典型的阶跃相应曲线
当SP发生变化时,可以从以下几个特性来评估PID参数设置是否合理:
• Absolute overshoot(OverAbso):记录的是在SP发生阶跃,PV自动跟随SP过程中,超出设定值的大量。如果这个值过高,一般来说,可以认为PID参数设定中比例增益K(P)可能设置的过高;
• Overshoot:超调比例,计算公式为:overabso/stepheight(设定值SP的变化量),比较合理的指标应该是小于15%;
• Settling time:调节时间,记录的是从SP阶跃信号产生到PV的超调小于ToleHiPv(PV震荡允许的范围)的时间;即从PV自调开始到回路稳定这个过程所用的时间。这个值越小说明回路的响应越快。
• Settling ratio:这是rise time(从PV自整定开始到PV次到达设定值的时间)与settle time的比值,一般建议这个比值小于25%,即settle time的时间不超出rise time的4倍,如果超出,那么可以适当的增强积分(I)的作用,即调小积分时间Ti。
本例中,我们将TIC201的设定值由120℃调整为190℃,PID回路阶跃响应的特性参数可以在CPM操作面板上获得:
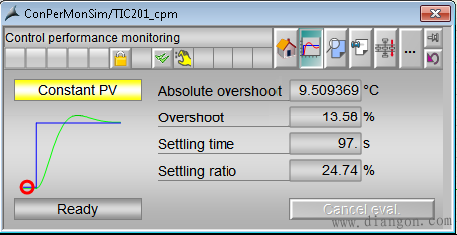
图3-3 设定开始点和操作模式
从参数可知,阶跃响应的大超调量为10℃左右,超调量只有SP变化量的10%,属于可接受范围。而整定时间为97s,比较缓慢,结合参数与性能考虑,我们可以适当增加比例作用(增大比例系数)和增强积分作用(减小积分时间)。
3.3 监控闭环控制回路工作状态
初始化CPM功能块,监控回路稳态特性
当控制回路自整定结束进入稳定状态后(此时回路必须保持为自动状态),可以对CPM功能块进行初始化,这个过程会获取为之后计算CPI(控制性能指标)和被控量方差等静态特性所必须的参考值。CPM功能块评估回路是否进入稳态主要是看动态特性视图中的自整定状态是否处于0阶段:
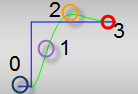
图 3-4:动态特性中的四个阶段:0:准备阶段 1:上升阶段 2:超调阶段 3:稳定阶段
推荐回路投入自动后等待一段时间,软件会自己判定当前回路是否进入稳定状态。也可以通过操作面板上的“cancel eval”按钮来停止计算,手动干预使系统进入稳态评估阶段。
3.4 初始化CPM步骤
步骤1:设定时间轴(time window)
CPM运算的核心是评定控制目标的方差,而方差是一段时间内实际值与目标值之差的平方的平均数。Time window决定了CPM统计方差的采样周期,CPM所在OB运行组决定了采样频率,这两个数据的设定不会影响计算的精度,却决定了CPM能否有效的反映当前控制回路的特性。一般建议这里设置为20倍积分时间或10倍微分时间,具体应根据不同工艺状态进行调整。
Time window设置方式如下图所示:
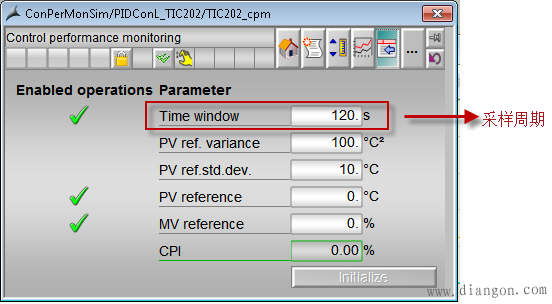
图 3-5 时间窗口设置
示例中我们将CPM功能块的计算周期参数time window设置为120s
步骤2:点击操作面板中的“initialize”按钮,初始化CPM 功能块。初始化CPM功能块需要满足以下几个条件:
• 控制回路处于自动状态;
• 回路处于稳定状态(自整定过程结束);
• Time window设置完成。
如果不满足以上几点条件,操作面板会有如下提示,当所有条件都满足,初始化按钮会变成可操作状态,点击后初始化完成:
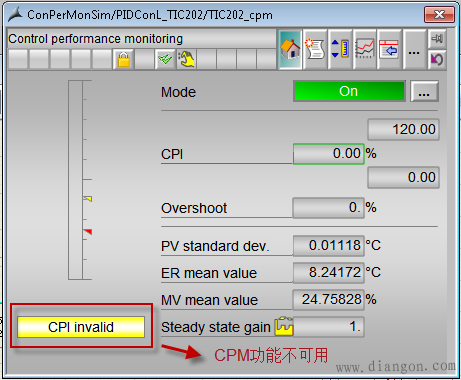
图 3-6 初始化条件不具备
点击“initialize”按钮后,CPM功能块会抓取当前状态下的PV值、MV值和ER值作为之后评估这个回路自调状态的标准,所以一定要在控制对象达到佳工况时进行初始化!
注意:关于初始化的相关介绍也可以通过CPM的在线帮助获得,选中CPM功能块点F1,见“ConPerMon > Functions”。
3.5 评估CPM中的参数
在CPM面板的标准视图中,可以获得闭环控制回路的稳态特性。稳态特性反应了回路投入自动后的工作状态,通过分析稳态特性参数,可以对可能发生的故障进行预判。标准视图如下图:
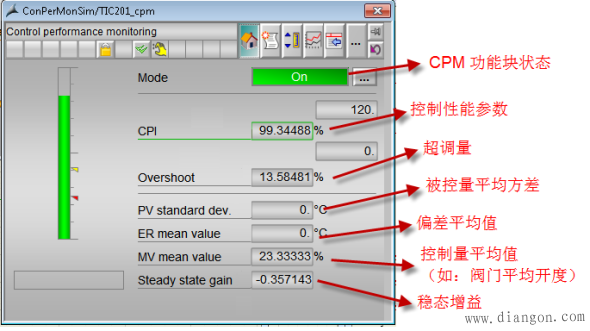
图 3-7 标准视图
CPI 控制性能参数:
CPI参数用数值的方式直观的反应了一个PID回路在自动状态下的工作情况。初始后CPI为,理想状态下这个数值应该保持在左右,当CPI值过低(比如低于75%)时,则应对造成数值降低的原因进行分析,防止事故的发生。
CPI评定的核心是方差计算。方差是实际测量数据与期望数据之差的平方的平均数,在我们的CPM模块中,实际测量值指的是PV值,期望数据是回路中设定的SP。CPM中计算出的方差是:在time window时间内,记录n个PV值与PV_Ref差的平方的累加的平均数,“PV StdDev”是方差开根号后的值,这个值反映了在时间窗口内,PV与PV_Ref的偏差,这个值越小,说明工艺越稳定。
CPI为参考方差与实时方差的比值。初始化CPM功能块的时候,会记录一个方差值作为参考方差。当实时方差等于参考方差时,CPI=。随着长期持续的生产,会因为生产工艺波动,外界干扰增加或者生产设备的不稳定等各种因素使PV值出现波动,相对于控制目标值的差值就会增加,相应的,实时方差也会增加。这时CPI的比值因为分母的增加而小于,这就反映出当前控制回路的稳定状况。所以CPI的数值越高越好,如果出现大于的情况,则说明这个时候的实时方差要小于参考方差。而如果CPI小于70%,那么就要考虑一下是何原因造成方差过大,控制回路是否处于稳定状态了。
Overshoot 超调量
被控变量PV值相对于设定值SP值的大偏移量。动态视图和标准视图中均有对超调量的监控,如果这个值过大,一般情况下建议减小PID控制回路的比例作用P值。
PV standard dev 被控量实时方差
在CPM功能块初始化的时候,功能块会记录当前的PV值作为标准PV参考值,实际PV值相对于标准PV的平方差值的平均数开根号后为实时方差。

![]()
其中: 为PV的实时值;
为PV的标准参考值。
注意:这里不选取SP值作为PV参考值是考虑到如果因为设计、干扰等不确定因素的影响,PV值无法完全等于SP值,但是这个偏差又是可以接受的情况。理想情况下,PV参考值是应该等于SP值的。
在理想的状态下,这个值应该是0,也就是PV值相对于PV参考值(PV_Ref)完全没有偏差。如果被控变量标准偏差值增长到超出合理范围(排除干扰或工况波动所带来的偏移),可以从以下两个方面考虑:
1)现场的工艺状况发生了较大的改变,已经超出了当前PID参数或者控制回路的控制能力。
2)现场的调节装置是否工作正常,比如阀门不动作或者与现场执行机构连接的信号线出了问题。
• “ER mean value”偏差平均值:偏差(SP-PV)在time window时间段内的平均值,这个数值理想状态下应该为0。
• “Stead state gain”稳态增益。
在初始化CPM功能块时,功能块会记录当时的PV和MV作为PVref和MVref。稳态增益的计算公式如下;
![]()
计算这个数据的意义在于可以利用这个参数监控现场执行机构的工作能力。假设CPM初始化的时候,现场执行机构处于佳工作状态。将PV控制在目标值需要的MV开度为A,随着现场设备的老化或工况变化(如换热器的换热壁上沉积杂质),执行机构的控制能力下降,这时将PV控制在目标值需要的MV开度为B。如果B远大于A,则可认为控制回路的控制能力下降。
当CPM初始化的时候,功能块会记录下当时的“steadstatGain”数值,通过分析过程稳态增益的变化,可以判断现场执行机构的控制能力是否有衰减。如果这个数值发生较大的变化时,建议及时检查现场执行机构的工作状态设备或考虑工艺条件是否有较大变化。
3.6 当工况发生较大变化时,重新初始化CPM
CPM功能块的所有评估依据都是建立在工况不变(控制对象的模型不发生变化)这个前提下的。如果因为设备状态或者负荷改变使工况有了较大的变化,例如重新调整了设定值SP,以之前标准来评估已经失去了参考价值(如:CPI会远低于或远高于,但并非是因为控制回路本身的原因)。这个时候我们建议您重新初始化CPM功能块。
3.7 通过概率分布图(scatter plot)评估设备状态
概率分布图是一个二维散点图,纵轴是CV(controlled value),也就是PV值。横轴是MV值。图中记录的每一个点代表的是每一个阀门开度对应的过程值,采样频率等于CPM所在功能块的执行周期。根据阀门的曲线特性以及可控区间的线性原则,理想情况下,记录的点应该是呈椭圆状分布于这个二维图中。
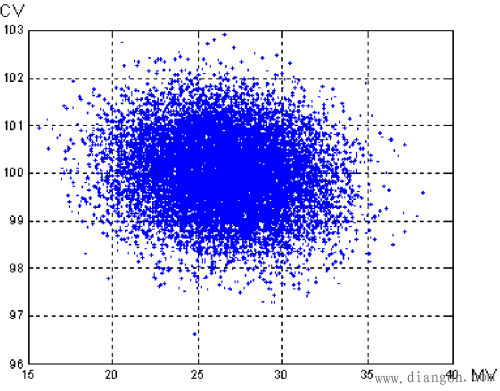
图3-8 概率分布图
如果现场控制单元的出现非线性工作情况,如条件装置受到额外的摩擦力影响或者其它的干扰。采样点的分布可能会出现如下图所示的情况,这个时候应该及时检查现场设备。
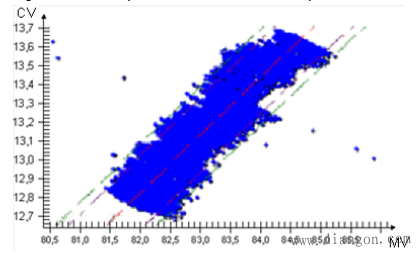
图3-9 概率分布图
综合上面的几个监控参数可以看出,通过简单的CPM组态,我们可以获得关于控制回路非常丰富的信息,这些信息可以反映控制回路控制的稳定性,更重要的是,通过一些参数并结合现场的经验,可以判断出现场执行机构状态改变对控制状态产生的影响,对故障提前做出预判,大大降低自动化控制出现故障的风险。
4 CPM功能块扩展应用
CPM功能块除了可以监控PID单回路,也可以结合各种较为复杂或先进控制方案使用,监控自动控制的质量。关于CPM功能结合复杂控制的实现方式可以参考PCS 7下的示例项目。
