6ES7321-1BP00-0AA0型号规格







6ES7321-1BP00-0AA0型号规格
异步电机又分为鼠笼型电机和绕线型电机,其区别在于转子。鼠笼型电机转子由金属条制成,铜制或铝制。铝的价格比较低,我国又是铝矿大国,在要求不高的场合应用广泛。但铜的机械性能和导电性能都好于铝,就我所接触的绝大部分都是铜制转子。鼠笼型电机在工艺上解决了断排的问题后,可靠性远远超过绕组型转子的电机。而其缺点在于,金属转子在旋转的定子磁场中切割磁感线获得的转矩较小,且起动电流较大,对起动力矩要求较大的负载难以胜任。尽管增加电机铁心长度可以获得更多的转矩,但力度十分有限。绕线型电机在启动时通过滑环给转子绕组通电,形成转子磁场,与旋转的定子磁场相对运动,因此获得转矩更大。且在启动过程中串联水电阻来降低启动电流,水电阻由成熟的电控装置控制随启动过程改变阻值。适用于轧机、提升机等负载。由于绕线型异步电机相对鼠笼型电机增加了滑环、水电阻等,在整体设备价格上有一定提高。其与直流电机相比,调速范围较为狭窄且转矩相对较小,相应价值也低。
然而异步电机由于给定子绕组通电建立旋转磁场,而绕组属于电感性元件不做功,要从电网中吸收无功功率,对电网冲击很大。直观体验有大功率电感性电器接入电网时,电网电压下降,电灯亮度一下都降低。因此供电局对异步电动机的使用会有所限制,这也是很多工厂必须考虑的地方。部分用电大户如钢厂、铝厂等,选择建立自备电厂,形成自己的电网,以减免对异步电动机的使用限制。所以异步电动机如果要满足大功率负载使用,需配备无功功率补偿装置,而同步电动机则可通过励磁装置向电网提供无功功率,功率越大同步电动机的优势就越明显,由此产生了同步电动机的舞台。
PPI通讯PPI协议是S7-200CPU基本的通信方式,通过原来自身的端口(PORT0或PORT1)就可以实现通信,是S7-200CPU默认的通信方式。RS485串口通讯第三方设备大部分支持,西门子S7PLC可以通过选择自由口通信模式控制串口通信。简单的情况是只用发送指令(XMT)向打印机或者变频器等第三方设备发送信息。不管任何情况,都必须通过S7PLC编写程序实现。当选择了自由口模式,用户可以通过发送指令(XMT)、接收指令(RCV)、发送中断、接收中断来控制通信口的操作。MPI通讯MPI通信是一种比较简单的通信方式,MPI网络通信的速率是19.2Kbit/s~12Mbit/s,MPI网络多支持连接32个节点。
置位与复位指令S、RS,执行置位(置1)指令时,从bit或OUT的地址参数开始的N个点都被置位。执行复位(置0)指令时,从bit或OUT的地址参数开始的N个点都被复位。置位与复位的点数可以是1-255,当用复位指令时,如果bit或OUT的是T或C时,那么定时器或计数器被复位,同时当前值将被清零。空操作指令NOPNOP指令不影响程序的执行,执行数N(1-255)。可编程控制器梯形图设计规则1.触点的安排梯形图的触点应画在水平线上,不能画在垂直分支上。2.串、并联的处理在有几个串联回路相并联时,应将触点多的那个串联回路放在梯形图上面。在有几个并联回路相串联时,应将触点多的并联回路放在梯形图的左面。
指令大全这是因为外部停车设备选取按钮常闭触点所致,不操作该按钮,则输出Y0正常接通,若按下该按钮,输出Y0断电。3.停车按钮使用常开型若希望编制出符合我们平时阅读习惯的梯形图程序(图4),则在选用外部停车设备时需使用按钮SB0的常开触点与X0相连。图4"起保停控制"梯形图程序(停车按钮使用常开触点)I/O分配:SB0--X0,SBl--Xl,输出Y0图4梯形图完成相同的控制功能,程序中停车信号X0使用的触点类型却不相同,其原因就是连接在输入继电器X0上的外部停车按钮触点类型选用不同。图4所示梯形图程序更加符合我们的阅读习惯,也更易分析其逻辑控制功能,因此在PLC构成控制统中,外部开关、按钮无论用于起动还是停车。
可将程序按结构形式分为基本程序和模块化程序。基本程序:既可以作为程序控制简单的生产工艺过程,也可以作为组合模块结构中的单元程序;依据计算机程序的设计思想,基本程序的结构方式只有三种:顺序结构、条件分支结构和循环结构。模块化程序:把一个总的控制目标程序分成多个具有明确子任务的程序模块,分别编写和调试,后组合成一个完成总任务的完整程序。这种方法叫做模块化程序设计。我们建议经常采用这种程序设计思想,因为各模块具有相对性,相互连接关系简单,程序易于调试修改。特别是用于复杂控制要求的生产过程。(2)PLC控制系统的程序设计要点。PLC控制系统I/O分配,依据生产流水线从前至后,I/O点数由小到大;尽可能把一个系统、设备或部件的I/O信号集中编址。
西门子S120电源模块6SL3130-6AE15-0AB1
1、图形拉伸
下面有五条直线,如果想同时改变直线的倾斜角度,这时候我们可以用到拉伸命令。

编辑>图形>拉伸

然后全选5根线的顶端,就可以自由的拖动变形了。

图形中还有一些修剪,倒角,圆角等CAD中常用命令,大家可以自己尝试下。
2、显示标示性的编号
打开EPLAN设置,勾选显示标示性的编号选项。

这样,以后在添加或查找属性的时候,可以根据编号来快速查找。

3、添加EPLAN版本属性
打开项目管理,在属性中添加<10043>属性,可以将EPLAN版本信息添加到项目中。

如果其他人想打开你的项目又不知道用哪个版本时,只需在任何EPLAN版本中,打开项目窗口,点击项目,在右侧的信息栏就可以看到项目近使用的EPLAN版本息。

4、**特殊符号
EPLAN中如果想输入特殊符号,只需要在文本框中按下快捷键CTRL+S ,就可使用EPLAN自带的一些特殊符号。比如平方这个2。如果有些符号没有,可以在Word中打好之后,粘贴到EPLAN中。

5、EPLAN 中使用多个剪贴板
在设置中,将仅使用一个剪贴板勾掉。
这样多可以使用12个剪贴板。(知道你没看明白,自己动手,勾掉之后,复制,粘贴一下就知道什么效果了)

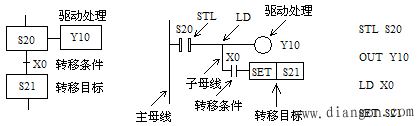
一、STL/RET 指令
( a ) 顺序功能图 ( b ) 梯形图 ( c ) 指令表 图 顺序功能图与梯形图的对应关系 ST L 触点驱动的电路块有 3 个功能:①对负载的驱动处理,即 在这一步要做什么; ②指定转移条件, 即满足该条件则退出这一步; ③指定转移目标, 即下一步状态是什么 。
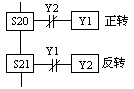
图 正反转的软件互锁控制 ( 10 ) SET 指令和 OUT 指令均可以用于步的活动状态的转移,可将原来活动步对应的状态器复位,将后续步置为活动步,此外还有自保持功能。 二、单序列编程
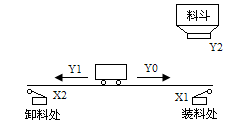
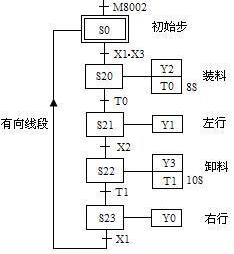
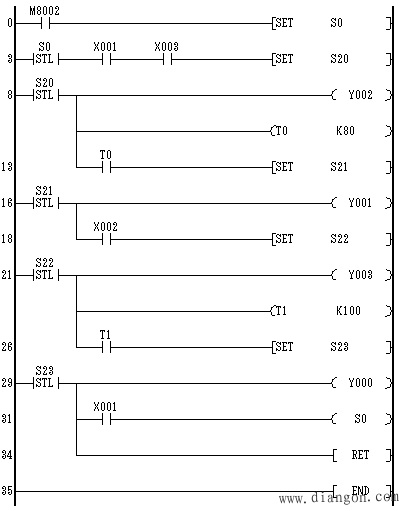
图 运料小车工作示意图 由运料小车的工艺要求可知,这是一个顺序流程控制过程,设计其顺序功能图的步骤如下:
( a )顺序功能图
( b )梯形图
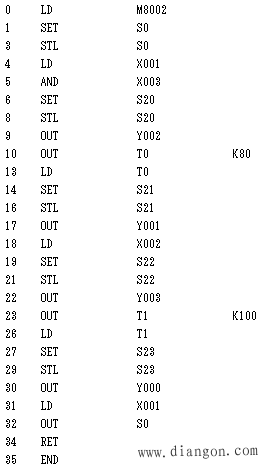
( c )指令表 图 单序列编程 三、选择序列编程
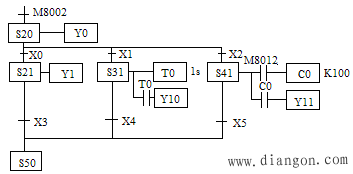
(a)顺序功能图
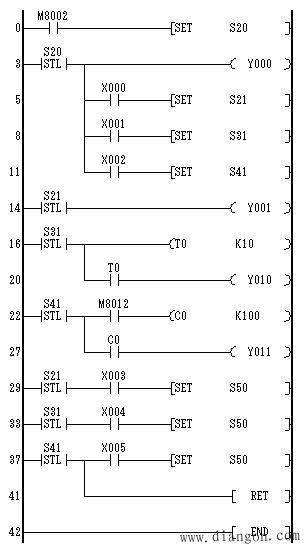
(b) 梯形图
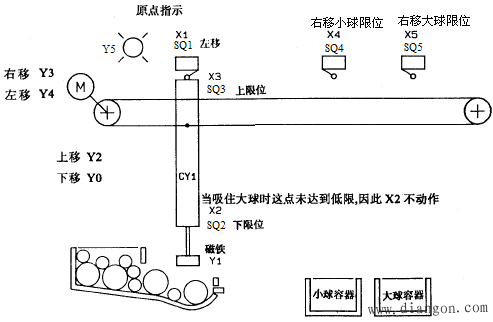
(c) 指令表 图 选择序列对应的梯形图和指令表 下图为使用传送带将大、小球分类选择传送的装置示意图。其动作顺序为下降、吸工件、上升、右移、下降、释放工件、上升、左移。左上为原点,当机械臂下降且电磁铁吸住大球时,限位开关 SQ2 断开,而吸住小球时 SQ2 接通,以此判断大球或小球。
图 大、小球分拣示意图 根据工艺要求,该控制流程可依据 SQ2 的状态(即对应大、小球)分成两个分支,如下图所示。
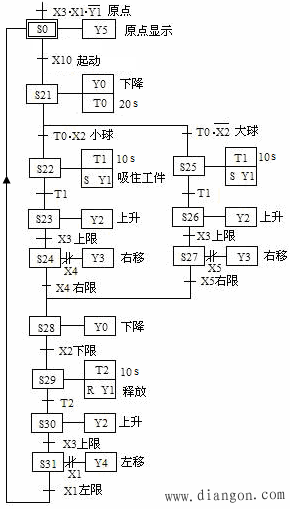
图 大、小球分拣顺序功能图 根据上图,得到大、小球分拣控制系统的步进梯形图和指令表如下图( a )和( b )所示。
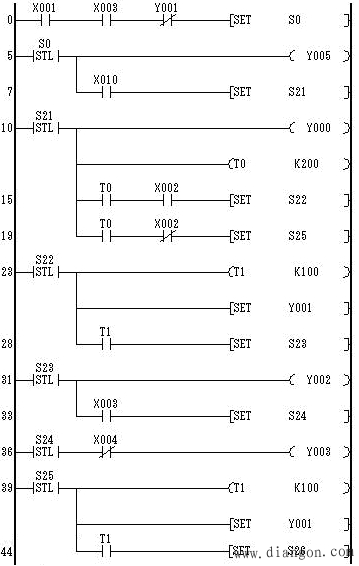
(a) 梯形图
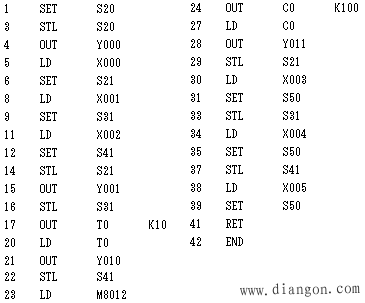
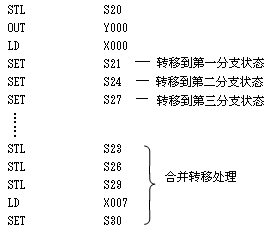
( b )指令表 图 大、小球分拣系统步进梯形图和指令表 四、并行序列编程
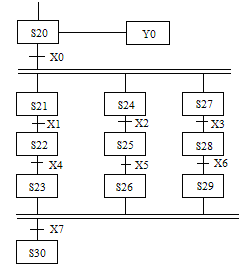
图 并行序列的顺序功能图 其梯形图和指令表见下图中的( a )图和( b )图。
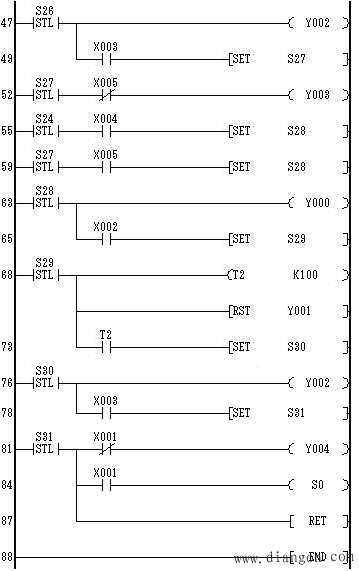
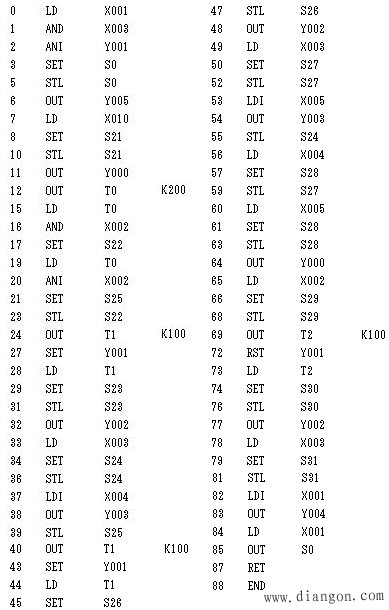
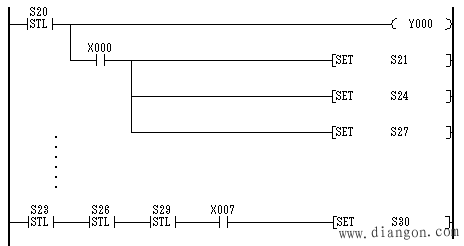
( a ) 梯形图
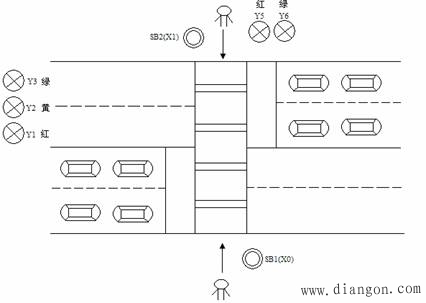
( b ) 指令表 图 并行序列对应的梯形图和指令表 下图所示为按钮式人行道红、绿灯交通管理器,它是一个并行分支与汇合序列。
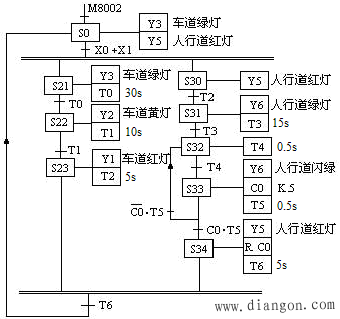
图 按钮式人行道交通灯示意图 正常情况下,汽车通行,即 Y3 绿灯亮、 Y5 红灯亮;当行人需要过马路时,则按下按钮 X0 (或 X1 ), 30s 后主干道交通灯的变化为绿→黄→红(其中黄灯亮 10s ),当主干道红灯亮时,人行道从红灯转成绿灯亮, 15s 后人行道绿灯开始闪耀,闪耀 5 次后转入主干道绿灯亮,人行道红灯亮。 下图是人行道交通灯的顺序功能图,该图既有并行分支,又有选择分支。
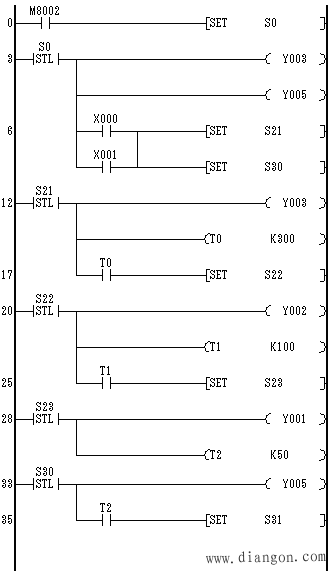
图 人行道交通灯顺序功能图 其步进梯形图和指令表分别见下图( a )和( b )。
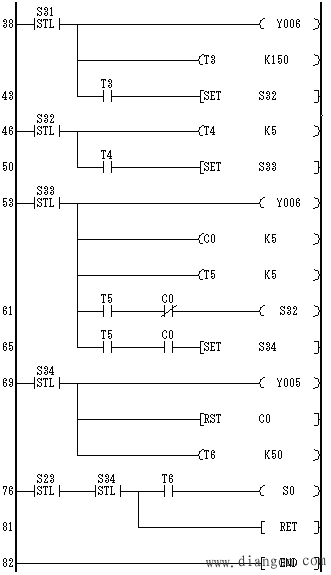
( a )梯形图
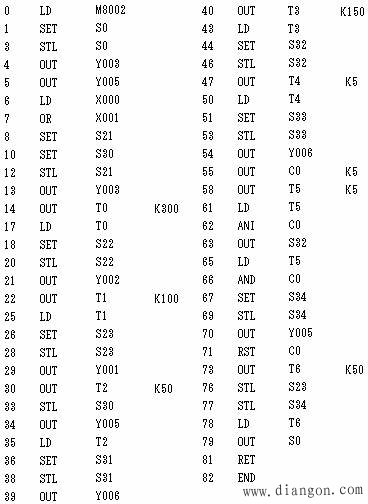
( b )指令表 图 人行道交通灯的步进梯形图和指令表 |