
6ES7321-1FH00-0AA0型号规格






6ES7321-1FH00-0AA0型号规格
通用模糊控制器在PLC上的实现
现代控制系统中的模糊控制能方便地解决工业领域中常见的非线性、时变、大滞后、强耦合、变结构、结束条件苛刻等复杂问题。可编程控制器以其高可靠性、编程方便、耐恶劣环境、功能强大等特性很好地解决了工业控制领域普遍关心的可靠、安全、灵活、方便、经济等问题,这两者的结合,可在实际工程中广泛应用。该文研究了通用模糊控制器在PLC上实现的几种算法,用离线计算、在线查表插值的方法实现模糊控制。
为了满足不同执行机构对控制量形式的要求,采用增量式/位置式模糊控制输出的算法,在增量式模糊控制输出时,可实现手动与自动之间的无扰动切换。为了消除由于频繁动作引起的振荡,采用了带死区的模糊控制算法。此外,一般的在线查表模糊控制器中存在着模糊量化取整环节,即当误差E与误差变化率EC不等于模糊语言值(例如NB,NM,NS,ZO,PS,PM或PB)时,E和EC取整,这时从查询表中查到的控制量U只能近似地反映模糊控制规则,因此产生误差。由于量化误差的存在,不仅使模糊控制器的输出U不能准确地反映其控制规则,而且会造成调节死区,在稳态阶段,使系统产生稳态误差,甚至会产生颤振现象。文中提出的二元三点插值法可从根本上消除量化误差和调节死区,克服由于量化误差而引起的稳态误差和稳态颤振现象。图1—1给出了通用模糊控制器的基本组成结构。

二、通用模糊控制器在PLC上的设计实现
图2—1 增量式输出模糊控制系统框图

确定各模糊变量的隶属函数类型;**输入、输出变量的模糊化;制定模糊控制规则;确定模糊推理算法;模糊输出变量的去模糊化;按所需的格式保存计算结果生成查询表。
实际应用中广泛采用的二维模糊控制器多选用受控变量和输入给定的偏差E和偏差变化率EC作为输入变量,因为它已能够比较严格的反映受控过程中输入变量的动态特性,可满足大部分工程需要,同时也比三维模糊控制器计算简单,模糊控制规则容易理解。对于多变量模糊控制器可利用模糊控制器本身的解耦特点,通过模糊关系方程分解,在控制器结构上实现解耦,即将一个多输入多输出(MI—MO)的模糊控制器,分解成若干个多输入单输出(MI—SO)的模糊控制器,这样就可采用单变量模糊控制器的设计方法。该文研究了二维通用模糊控制器的设计。为了便于由用户在线控制时决定是增量式输出还是位置式输出,输出变量取调节量的变化U,这也有利于通过对调节量变化U的调整,使系统偏差减少。
由于模糊控制器的控制品质受控制器输出方式的影响,对不同的受控对象提供位置式输出和增量式输出这两种选择方式。位置式输出算法的缺点是输出的u(k)对应的是执行机构的实际位置,如果计算机出现故障,会引起由于u(k)的大幅度变化而导致执行机构位置的大幅度变化。如果采用增量式算法时,计算机输出的是控制增量Δu(k)对应的本次执行机构位置(例如阀门开度)的增量,图2—1为增量式输出模糊控制系统框图,阀门实际位置的控制量即控制量增量的积累![]() 是利用算式u(k)=u(k-1)+Δu(k)通过执行软件来完成。
是利用算式u(k)=u(k-1)+Δu(k)通过执行软件来完成。
模糊控制算法的实现是通过模糊推理所得,但该结果是一个模糊矢量,不能直接用于控制被控对象,必须转换为一个执行机构可以接受的**量。将所有可能输入状态的非模糊输出以同样方法计算后形成如表2—1所示的查询表,该表以数据模块形式存入计算机程序中,当一组输入给定时,可由该表查出相应的输出值。该方法将复杂的模糊计算融进查询表中,在实际使用时节省计算时间,并使控制变得简单明了。

2、在线部分设计
计算机离线运算得到的模糊控制器的总控制表经过系统在线反复调试、修改,后以数据模块形式存入PLC系统内存中,由一个查询该表的子程序管理。查询子程序的流程如图2—2所示,图中fielde、fieldec及fieldu分别表示误差E、误差变化率EC和控制量U的论域范围。由流程图可知,控制器的调节方式有手动和自动两种,输出方式有增量式和位置式输出两种。如果输出方式选择为增量式输出,则可以实现手动调节方式到自动调节方式的无冲击切换。



(1)二元三点插值
给定矩型域上n×m个结点(xi,yj)的函数值zij=(xi,yj),其中i=0,1,…,n-1;j=0,1,…,m-1,在两个方向上的坐标分别为x0<x1<…<xn-1,y0<y1<…<ym-1,利用二元三点插值公式可计算出插值(u,v)处的函数近似值w=z(u,v)。表2—1用函数形式表示为Uij=f(Ei,ECj),其中i=1,2,…,k1;j=1,2,…,k2。设某个采样周期的输入为E、EC,则需求出U=f(E,EC)的值。
采用二元三点插值法运算相当于E与EC在其论域内的分档数趋于无穷大,这样不仅能够满足表2—1所给出的查询表制定的控制规则,而且还在控制规则表内的相邻分档之间以线性插值方式补充了无穷多个新的、经过细分的控制规则,更加充实完善了原来的控制规则,并从根本上消除了量化误差和调节死区,克服了由于量化误差而引起的稳态误差和稳态颤振现象,显著改善了系统的性能,尤其是稳态性能。
(2)带死区的模糊控制算法
为了避免控制动作过于频繁,消除由于频繁动作引起的震荡,带死区的控制算法是一个好的解决办法。
![]()
上式中,死区e0是一个可调节的参数,其具体数值可根据实际控制对象由实验确定。若e0值太小,使控制动作过于频繁,达不到稳定被控对象的目的;若e0值太大,则系统将产生较大的滞后。
带死区的模糊控制器的系统结构如图2—3所示,此控制系统实际上是一个非线性系统。即当|e(k)|≤|e0|时,模糊控制器输出为零;当|e(k)|>|e0|时,模糊控制器有适当的输出。

三、应用实例
电机调速控制系统见图3—1,模糊控制器的输入变量为实际转速与转速给定值之间的差值e及其变化率ec,输出变量为电机的电压变化量u。图3—2为电机调试输出结果,其横坐标为时间轴,纵坐标为转速。当设定转速为2 000r/s时,电机能很快稳定运行于2 000r/s;当设定转速下降到1 000r/s时,转速又很快下降到1 000r/s稳定运行。


6SL3000-0CE15-0AA0电抗器
正因为这样,图形和图形IO域先前的 “透明"行为已经改变,就像画面的透明区域一样。
当从 V11 或 V12 升级到 V13 版本时必须更改对象的设置。(同样适用于移植 WinCC Flexible 项目至 TIA Portal V13 或更高版本。) 也可使用透明色工具(在TIA V14 之前版本)或手动更改每个画面(所有TIA版本)。
用透明色工具集中修改
在此条目的后可下载到透明色工具,可以集中的检查每个画面的修改,而不必逐个检查和改变每个屏幕,并会在预览窗口中显示设置修改的结果。
注意:
使用透明化工具之前请遵守以下条款:
* 透明化工具与TIA WinCC V14 不兼容,如果您使用的是TIA WinCC V14,您需要手动修改设置根据下方的提示。
* 需要在 WinCC V13 SP1安装透明化工具。
* 如果使用的不同版本中的同一个面板,必须多次使用该透明工具来在所有版本中编辑,一次只能有一个版本被更改。
* 如果已经更改了面板实例的 "Transparent Color" 或者 "Graphics" 属性接口,这种行为在透明化工具中是不被认可的。
说明:
1. 在此条目后下载此文件并且在WinCC(TIA 博途)的电脑上解压文件。
2. 关闭 TIA 博途。
3. 双击"Transparency tool - Setup.exe" 文件打开。
4. 阅读并接受许可条件。在选择的一个目录中解压文件。
5. 打开目录,双击 "Setup.exe"安装。
注意事项:
如果在步骤4的后一个对话框中选择“打开提取位置"选项,则目标目录会自动打开。
图. 01
6. 打开WinCC (TIA 博途) 项目升级操作面板。
7. 在项目树中右键单击操作面板或者选择 "Languages and resources > Graphics",在弹出菜单中选择 "Change transparency option" 。
图. 02
8. 列表中显示所有图形和图形 IO 域透明像素和 "Transparency"属性启用情况,如果启用选项 "Use the screen background color for preview",预览窗口将显示同样的背景颜色。
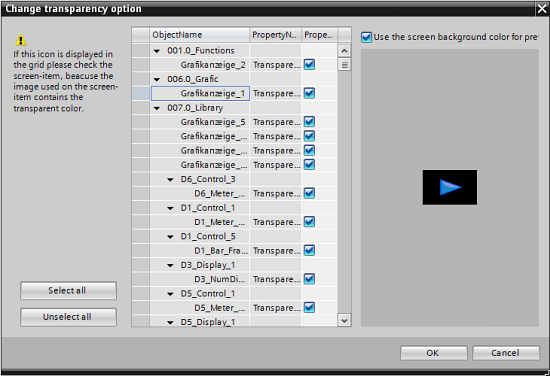
图. 03
9. 可以为每一个对象编辑 "Transparency" 属性,或者使用 "Select all" 和 "Unselect all" 按钮。
10. 如果对象上显示警告图标,建议检查该对象。在这种情况下是画面含有透明像素的颜色设置为透明色。如果启用了 "Transparency"选项,透明像素颜色显示黑色。如果 "Transparency"选项没有启用,背景显示原来的颜色。在这种情况下,应该更改初的文件。
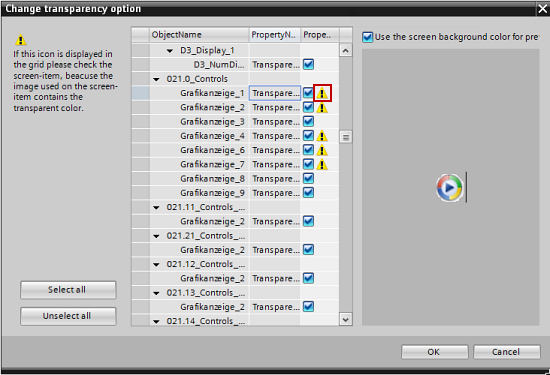
图. 04
11. 在图形IO域中,可以使用箭头按钮在预览窗口中检查所有图形列表中的画面。
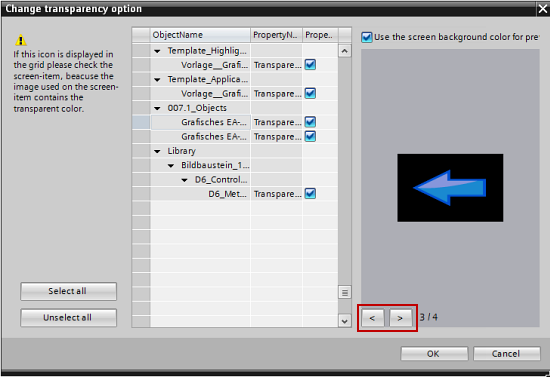
图. 05
12. 如果使用透明工具更改面板的 "Transparency" 属性,有这个属性的新版本面板将被在库中创建并且在项目实例中更新。参考注意事项。
| plc选型的基本原则是:所选的 PLC 应能够满足控制系统的功能需要。 1. PLC 结构的选择 在相同功能和相同 I/O 点数的情况下,整体式 PLC 比模块式 PLC 价格低。 2. PLC 输出方式的选择 不同的负载对 PLC 的输出方式有相应的要求。继电器输出型的 PLC 可以带直流负载和交流负载;晶体管型与双向晶闸管型输出模块分别用于直流负载和交流负载。 3. I/O 响应时间的选择 PLC 的响应时间包括输入滤波时间、输出电路的延迟和扫描周期引起的时间延迟。 4. 联网通信的选择 若 PLC 控制系统需要联入工厂自动化网络,则所选用的 PLC 需要有通信联网功能,即要求 PLC 应具有连接其它 PLC 、上位计算机及 CRT 等接口的能力。 5. PLC 电源的选择 电源是 PLC 干扰引入的主要途径之一,因此应选择优质电源以助于提高 PLC 控制系统的可靠性。一般可选用畸变较小的稳压器或带有隔离变压器的电源,使用直流电源时要选用桥式全波整流电源。 6. I/O 点数及 I/O 接口设备的选择 ( 1 )输入模块的输入电路应与外部传感器或电子设备(例如变频器)的输出电路的类型相配合,好能使二者直接相连。 ( 2 )选择模拟量模块时应考虑使用变送器,以及执行机构的量程是否能与 PLC 的模拟量输入 / 输出模块的量程匹配。 ( 3 )使用旋转编码器时,应考虑 PLC 的高速计数器的功能和工作频率是否能满足要求。 7. 存储容量的选择 PLC 程序存储器的容量通常以字或步为单位,用户程序存储器的容量可以作粗略的估算。一般情况下用户程序所需的存储器容量可按照如下经验公式计算: 程序容量 =K ×总输入点数 / 总输出点数 对于简单的控制系统, K=6 ;若为普通系统, K=8 ;若为较复杂系统, K=10 ;若为复杂系统,则 K=12 。在选择内存容量时同样应留有裕量,一般是运行程序的 25% 。不应单纯追求大容量,在大多数情况下,满足 I/O 点数的 PLC ,内存容量也能满足。 |
