
西门子模块6ES7331-1KF02-0AB0参数详细







西门子模块6ES7331-1KF02-0AB0参数详细
在通信领域内,有两种数据通信方式:串行通信和并行通信。串行通信:是指使用一条数据线,将数据一位一位地依次传输,每一位数据占据一个固定的时间长度。特别使用于PC与PC、PC与外设之间的远距离通信。
串行接口按电气标准及协议来分包括RS-232-C、RS-422、RS485等。RS-232-C、RS-422与RS-485标准只对接口的电气特性做出规定,不涉及接插件、电缆或协议。
1) 串行通信由于没有一个标准的通信协议,所以自动化设备的通信协议非常多,常用的Modbus、Pofibus、Devicenet等,plc一般都带有标准的硬件单元,所以在使用这些协议时,程序上只需要建立标准数据连接表就可以,无需在按照协议格式,填写头、数据、校验等内容。
2) 但是遇到一些没有标准协议的设备,比如一些仪表采用的SWP协议,就需要在程序中按照第三方设备的协议格式,将数据完整的填写在PLC内存中,然后再使用串行通信指令,将数据由制定的通信接口发送出去,然后再按照响应数据的格式编写接收响应数据的程序,而且遇到变量数据,校验码又不能提前计算好写入内存,只能在程序中编写校验程序,这样不可避免造成程序的编写量非常大,程序非常繁琐。
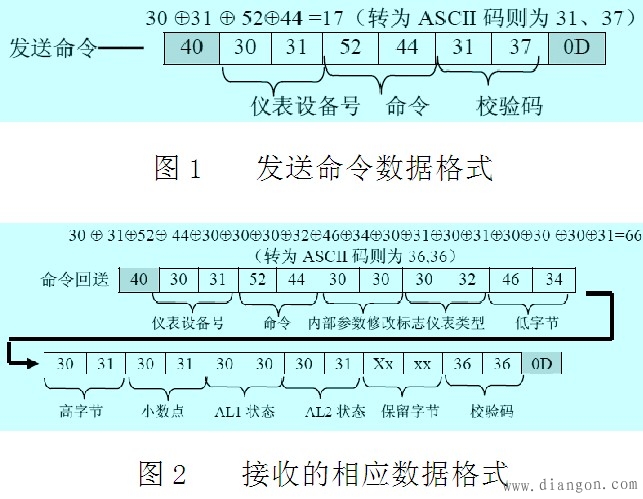
3) 如SWP系列仪表的通信协议,PLC读取仪表当前的数值(温度、压力等),需要按照协议内容发送命令,如“图1”PLC发送的数据(读取当前测量数值),“图2”仪表回送的响应数据,按照协议内容,该数据是一个ASC码格式的浮点数,在很长的响应数据中,只有“图2”中低字节、高字节、小数点,是当前需要的数据,所以需要在程序中使用数据处理指令,将有用的数据摘选出来,再将ASC码格式数据转换成16/10进制的数据,才完成仪表数据读取的工作。
梯形图的编程方式是指根据功能表图设计出梯形图的方法。为了适应各厂家的PLC在编程元件、指令功能和表示方法上的差异,下面主要介绍使用通用指令的编程方式、以转换为中心的编程方式、使用STL指令的编程方式和仿STL指令的编程方式。
为了便于分析,我们假设刚开始执行用户程序时,系统已处于初始步(用初始化脉冲M8002将初始步置位),代表其余各步的编程元件均为OFF,为转换的实现做好了准备。
1.使用通用指令的编程方式
编程时用辅助继电器来代表步。某一步为活动步时,对应的辅助继电器为“1"状态,转换实现时,该转换的后续步变为活动步。由于转换条件大都是短信号,即它存在的时间比它激活的后续步为活动步的时间短,因此应使用有记忆(保持)功能的电路来控制代表步的辅助继电器。属于这类的电路有“起保停电路"和具有相同功能的使用SET、RST指令的电路。
如图5-27a所示Mi-1、Mi和Mi+l是功能表图中顺序相连的3步,Xi是步Mi之前的转换条件。

图5-27 使用通用指令的编程方式示意图
编程的关键是找出它的起动条件和停止条件。根据转换实现的基本规则,转换实现的条件是它的前级步为活动步,并且满足相应的转换条件,所以步Mi变为活动步的条件是Mi-1为活动步,并且转换条件Xi=1,在梯形图中则应将Mi-1和Xi的常开触点串联后作为控制Mi的起动电路,如图5-27b所示。当Mi和Xi+1均为“l"状态时,步Mi+1变为活动步,这时步Mi应变为不活动步,因此可以将Mi+1=1作为使Mi变为“0"状态的条件,即将Mi+1的常闭触点与Mi的线圈串联。也可用SET、RST指令来代替“起保停电路",如图5-27c所示。
这种编程方式仅仅使用与触点和线圈有关的指令,任何一种PLC的指令系统都有这一类指令,所以称为使用通用指令的编程方式,可以适用于任意型号的PLC。
如图5-28所示是根据液压滑台系统的功能表图(见图5-26b)使用通用指令编写的梯形图。开始运行时应将M300置为“1"状态,否则系统无法工作,故将M8002的常开触点作为M300置为“1"条件。M300的前级步为M303,后续步为M301。由于步是根据输出状态的变化来划分的,所以梯形图中输出部分的编程极为简单,可以分为两种情况来处理:
1)某一输出继电器仅在某一步中为“1"状态,如Y1和Y2就属于这种情况,可以将Y1线圈与M303线圈并联,Y2线圈与M302线圈并联。看起来用这些输出继电器来代表该步(如用Y1代替M303),可以节省一些编程元件,但PLC的辅助继电器数量是充足、够用的,且多用编程元件并不增加硬件费用,所以一般情况下全部用辅助继电器来代表各步,具有概念清楚、编程规范、梯形图易于阅读和容易查错的优点。
2)某一输出继电器在几步中都为“1"状态,应将代表各有关步的辅助继电器的常开触点并联后,驱动该输出继电器的线圈。如Y0在快进、工进步均为“1"状态,所以将M301和M302的常开触点并联后控制Y0的线圈。注意,为了避免出现双线圈现象,不能将Y0线圈分别与M301和M302的线圈并联
西门子S120连接电缆6SL3060-4AF30-0AA0
1. 步
顺序控制设计法基本的思想是将系统的一个工作周期的划分为若干个顺序相连的阶段,这些阶段称为步(Step),可以用编程元件,(例如辅助继电器M和顺序控制继电器S)来代表各步。步是根据输出量的状态变化来划分的,在任何一步之内,各输出量的ON/OFF状态不变,但是相邻两步输出量总的状态是不同的,步的这种划分方法使代表各步的编程元件的状态与各输出量的状态是之间有着极为简单的逻辑关系。

送料小车开始停在左测限们开关X2处(见图17),按下起动按钮X0,X2变为ON,打开贮料斗的闸门,开始装料,同时用定时器T0定时,10s后关闭贮料斗的闸门,Y0变为ON,开始右行,碰到限位开关X1后停下来卸料(Y3为ON),同时用定时器T1定时;5s后Y1变为ON,开始左行,碰到限位开关X2后返回初始状态,停止运行。

根据Y0~Y3的ON/OFF状态的变化,显然一个工作周期可以分为装料,右行、卸料和左行这4步,另外还应设置等待起动的初始步,分别用M0~M4来代表这5步,图17左上部是小车运动的空间示意图,左下部是是有关编程元件的波形图(时序图),右边是描述该系统的顺序功能图,图中用矩形方框表示步,方框中可以用数字表示该步的编号,一般用代表该步的编程元件的元件的元件号作为步的编号,如M0等,这样在根据顺序功能图设计梯形图较为方便。
2. 初始步
与系统的初始状态相对应的步称为初始步,初始状态一般是系统等待起动命令的相对静止的状态。初始步用双线方框表示,每一个顺序功能图至少应该有一个初始步。
3. 活动步
当系统正处于某一步所在的阶段时,该步处于活动状态,称该步为“活动步"。步处于活动状态时,相应的动作被执行:处于不活动状态时,相应的非存储型动作被停止执行。
4. 与步对应的动作或命令
可以将一个控制系统划分为被控系统和施控系统,例如在数控车床系统中,数控装置是施控系统,而车床是被控系统。对于被控系统,在某一步中要完成某些“动作"(action);对于施控系统,在某一步中则要向被控系统发出某些“命令"(command)。为了叙述方便,
下面将命令或动作统称为动作,并用矩形框中的文字或符号表示,该矩形框应与相应的符号相连。
如果某一步有几个动作,可以用图18中的两种画法来表示,但是并不隐含这些动作之间的任何顺序。说明命令的语句应清楚地表明该命令是存储型的还是非存储型的。例如某步的存储型命令“打开1号阀并保持",是指该步为活动步时打开,该步为不活动时继续打开;非存储型命令“打开1号阀",是指该步为活动步时打开,为不活动步时关闭。
除了以上的基本结构之外,使用动作的修饰词(见表1)可以在一步中完成不同的动作。修饰词允许在不增加逻辑的情况下控制动作。例如,可以使用修饰词L来限制配料阀打开的时间。
表1 动作的修饰词
N
非存储型
当步变为不活动步时动作终止
S
置位(存储)
当步变为不活动步时动作继续,直到动作被复位
R
复位
被修饰词S,SD,SL,或DS起动的动作被终止
L
时间限制
步变为活动步时动作被起动,直到步变为不活动步或设定时间到
D
时间延迟
步变为活动步时延迟定时器被起动,如果延迟之后步仍然是活动的,动作被起动和继续,直到步变不活动步
P
脉冲
当步变为活动步,动作被起动并且只执行一次
SD
存储与时间延迟
在时间延迟之后动作被起动,一直到动作被复位
DS
延迟与存储
在延迟之后如果步仍然是活动的,动作被起动直到被复位
SL
存储与时间限制
步变为活动步时动作被起动,一直到设定的时间到或动作被复位
在图17中,定时器T0的线圈应在M1为活动步时“通电",M1为不活动步时断电,从这个意义上来说,T0的线圈相当于步M1的一个动作,所以将T0作为步M1的动作来处理。步M1下面的转换条件T0由在时时间到时闭合的T0的常开触点提供。因此动作框中的T0对应的是T0的线圈,转换条件T0对应的是T0的常开触点
梯形图沿袭了继电器控制电路的形式,它是在电器控制系统中常用的继电器、接触器逻辑控制基础上简化了符号演变来的,形象、直观、实用。
梯形图的设计应注意以下三点:
(一)梯形图按从左到右、从上到下的顺序排列。每一逻辑行起始于左母线,然后是触点的串、并联接,后是线圈与右母线相联。
(二)梯形图中每个梯级流过的不是物理电流,而是“概念电流",从左流向右,其两端没有电源。这个“概念电流"只是形象地描述用户程序执行中应满足线圈接通的条件。
(三)输入继电器用于接收外部输入信号,而不能由PLC内部其它继电器的触点来驱动。因此,梯形图中只出现输入继电器的触点,而不出现其线圈。输出继电器输出程序执行结果给外部输出设备,当梯形图中的输出继电器线圈得电时,就有信号输出,但不是直接驱动输出设备,而要通过输出接口的继电器、晶体管或晶闸管才能实现。输出继电器的触点可供内部编程使用
两处卸料小车自动控制的梯形图如图6-18b所示,它是在图6-17b的基础上根据新的控制要求修改而成的。小车在次碰到X5和碰到X3时都应停止右行,所以将它们的常闭触点与Y0的线圈串联。其中X5的触点并联了中间元件M100的触点,使X5停止右行的作用受到M100的约束,M100的作用是记忆X5是第几次被碰到,它只在小车第二次右行经过X5时起作用。为了利用PLC已有的输入信号,用起保停电路来控制M100,它的起动条件和停止条件分别是小车碰到限位开关X5和X3,即M100在图6-18a中虚线所示路线内为ON,在这段时间内M100的常开触点将Y0控制电路中X5常闭触点短接,因此小车第二次经过X5时不会停止右行。
为了实现两处卸料,将X3和X5的触点并联后驱动Y3和T1。调试时发现小车从X3开始左行,经过X5时M100也被置位,使小车下一次右行到达X5时无法停止运行,因此在M100的起动电路中串入Y1的常闭触点。另外还发现小车往返经过X5时,虽然不会停止运动,但是出现了短暂的卸料动作,为此将Y1和Y0的常闭触点与Y3的线圈串联,就可解决这个问题。系统在装料和卸料时按停止按钮不能使系统停止工作,请读者考虑怎样解决这个问题。
西门子S120连接电缆6SL3060-4AC30-0AA0
根据图16所示的功能流程图,设计出梯形图程序。

1使用起保停电路模式的编程
对应的状态逻辑关系为:

对应的梯形图程序如图17所示。
2使用置位、复位指令的编程
对应的梯形图程序如图18所示。

3使用顺序控制指令的编程
对应的功能流程图如图19所示。对应的梯形图程序如图20所示。



(3)并行分支及编程方法
并行分支也分两种,图21a为并行分支的开始,图21b为并行分支的结束,也称为合并。并行分支的开始是指当转换条件实现后,同时使多个后续步激活。为了强调转换的同步实现,水平连线用双线表示。在图21a中,当工步2处于激活状态,若转换条件e=1,则工步3、4、5同时起动,工步2必须在工步3、4、5都开启后,才能关断。并行分支的合并是指:当前级步6、7、8都为活动步,且转换条件f成立时,开通步9,同时关断步6、7、8
