
6ES7331-7KF02-0AB0参数详细






6ES7331-7KF02-0AB0参数详细
自锁,是在接触器线圈得电后,利用自身的常开辅助触点保持回路的接通状态,一般对象是对自身回路的控制。
如把常开辅助触点与启动的电动开关并联,这样,当启动按钮按下,接触器动作,辅助触电闭合,进行状态保持,此时再松开启动按钮,接触器也不会失电断开。一般来说,在启动按钮和辅助按钮并联之外,还要在串联一个按钮,起停止作用。点动开关中作启动用的选择常开触点,做停止用的选常闭触点。
互锁,说得是几个回路之间,利用某一回路的辅助触点,去控制对方的线圈回路,进行状态保持或功能限制。一般对象是对其他回路的控制。
联锁,就是设定的条件没有满足,或内外部触发条件变化引起相关联的电气、工艺控制设备工作状态、控制方式的改变。
“在一个回路中,即有自锁又有互锁的就叫做“联锁""这种说法并不科学,也不全面。
自锁触头的作用是保证电动机的连续运行。互锁触头的作用是防止误操作造成短路。

(1)自锁电路的原理:
按启动正转按钮SB2→KM1线圈通电吸合→KM1主触点接通(电动机正转)
└─ KM1-1合──────────┘
KM1-1的作用是保证SB2松开后,KM1的线圈能够继续得电吸合,电动机能够连续运行。接触器KM1的线圈得电与触点 KM1-1的闭合,是相互依存的关系,这就是“自锁"。
按启动反转按钮SB3,KM2线圈通电吸合,过程与正转相同。
(2)互锁的原理:
如果在KM1通电,电动机正转中,不慎按了反转按钮SB3,KM2和KM1都吸合通电,将造成主电路短路。为此,把KM!的常闭触点KM1-2 串联在KM2的线圈中回路,在KM1吸合时KM2不可能通电。用同样的方法,在KM1吸合时KM2也不可能通电。KM1和KM2的这种相互制约的关系,就是“互锁
西门子PLC控制器6ES7314-6EH04-0AB0
通过双击Microbox 427桌面上的站组态管理器快捷方式或双击系统托盘上的小电脑图标打开站组态管理器。查看“站组态管理器Station Configuration Editor"中PC站的属性,并将其设置为Way3,与硬件组态中名称一致。并确保站组态管理器中各虚拟槽位上安装的组件与Step 7项目中的硬件组态中PC站各槽位上安装的组件一致,如图12所示。
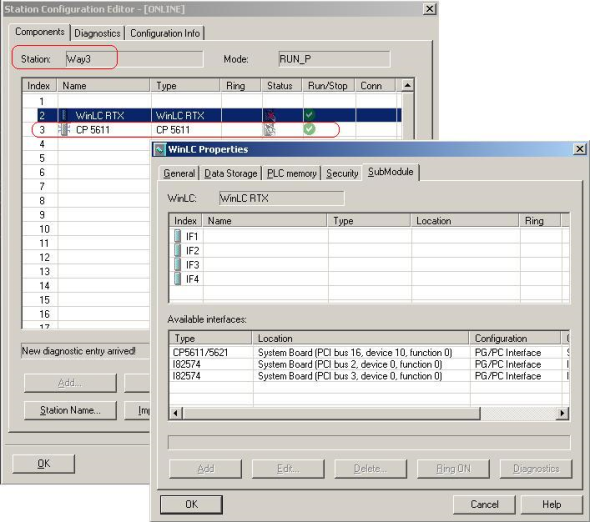
图12
用PROFIBUS 电缆连接编程设备(本例为安装有CP5611的PC)的PROFIBUS接口和Microbox 427集成的PROFIBUS接口。然后,通过Step 7菜单“Options"打开“Set PG/PC Interface"界面,如图13所示,选择访问点为“S7ONLINE (STEP7) ? CP5611(PROFIBUS)",点击“OK"完成设置。启动WinLC RTX之后便可下载PC站的组态和程序。

图13
本例中,编程器通过PC站上的PROFIBUS通信卡CP5611路由到SoftBus,再与WinLC RTX连接,如图14所示。
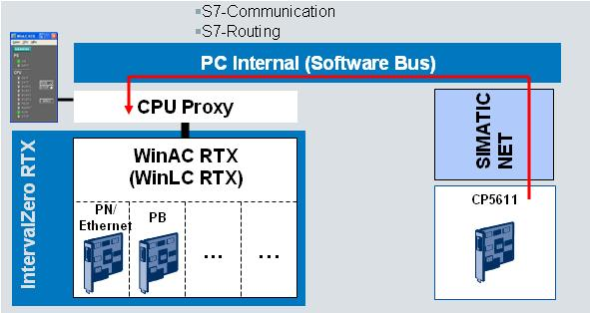
图14
方式4:
如图15所示,有一台预装有WinAC RTX 的Microbox 427,组态PC站名称为Way4。Microbox 427的以太网接口组态为PC 站的通信卡,而非WinLC RTX子模块 (SubSlot)。
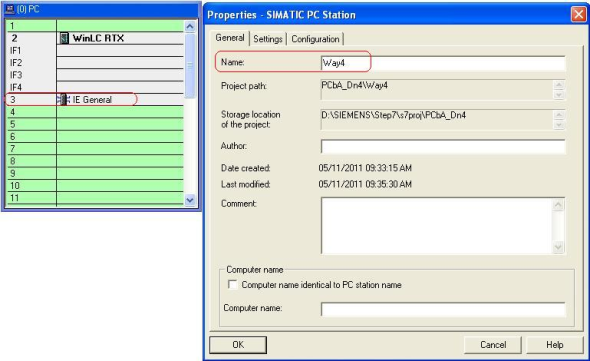
图15
通过双击Microbox 427桌面上的站组态管理器快捷方式或双击系统托盘上的小电脑图标打开站组态管理器。查看“站组态管理器Station Configuration Editor"中PC站的属性,并将其设置为Way4,与硬件组态中名称一致。并确保站组态管理器中各虚拟槽位上安装的组件与Step 7项目中的硬件组态中PC站各槽位上安装的组件一致,如图16所示。
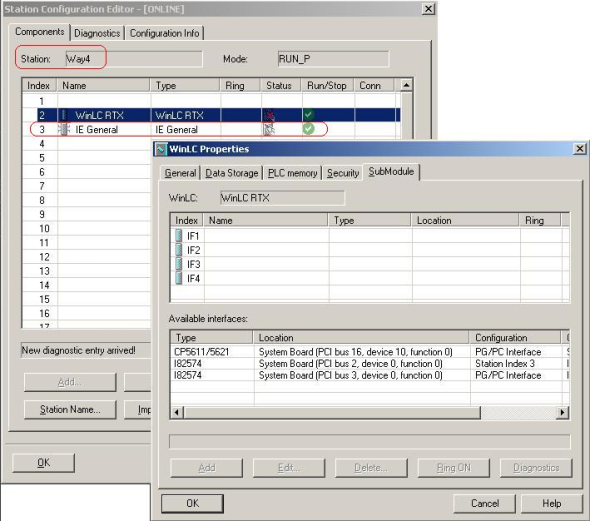
图16
用以太网线连接编程设备的以太网接口和Microbox 427上被组态为PC 站的通信卡的以太网接口。然后,通过Step 7菜单“Options"打开“Set PG/PC Interface"界面,如图17所示,选择访问点为“S7ONLINE (STEP7) ? TCP/IP Broadcom NetXtreme 57xx …",点击“OK"完成设置。启动WinLC RTX 之后便可下载PC站的组态和程序。

图17
本例中,编程器通过PC站上的以太网通信卡IE General路由到SoftBus,再与WinLC RTX连接,如图18所示。

图18
方式5:
可通过WinLC RTX的控制面板菜单中的“Restore…(恢复)"选项来将备份的组态和程序下载到WinLC RTX中。在此之前需要对组态和程序进行备份,打开WinLC RTX的操作面板,如图19所示。
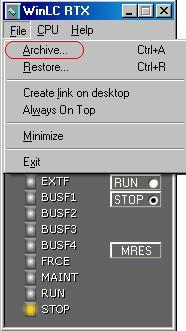
图19
通过菜单“File?Archive…"打开备份界面,如图20所示。在打开窗口中选择备份文件存放路径并输入备份文件名,如“WinLC_RTX_Bak", 点击“Save"按钮即可完成备份。
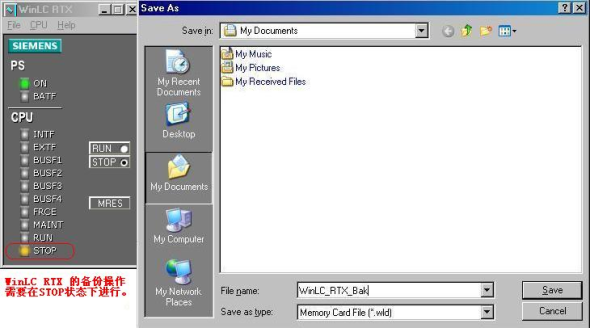
图20
如果要恢复备份,可通过菜单“File?Restore…"打开恢复界面,如图21所示。选择要恢复的备份文件,点击“Open"按钮即开始恢复备份的组态和程序。
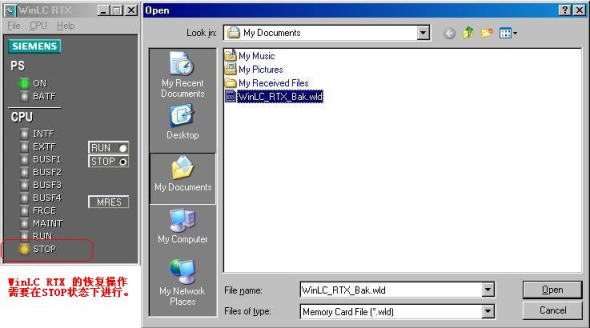
图21
在恢复完成后会弹出图22所示提示,点击“OK"按钮完成整个恢复过程。
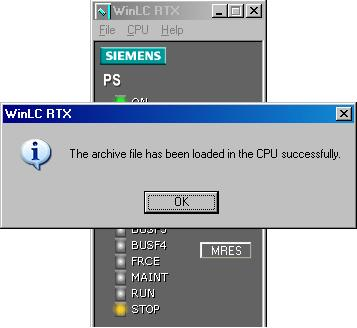
图22
注意:
WinLC RTX 的组态和程序的备份和恢复操作需要在WinLC RTX 处在STOP 状态下才能进行
西门子S7-200CPU的通信口可以设置为自由口模式。选择自由口模式后,用户程序就可以完全控制通信端口的操作,通信协议也完全受用户程序控制。 S7-200CPU上的通信口在电气上是标准的RS-485半双工串行通信口。此串行字符通信的格式可以包括: 一个起始位 7或8位字符(数据字节) 一个奇/偶校验位,或者没有校验位 一个停止位 自由口通信速波特率可以设置为1200、2400、4800、9600、19200、38400、57600或112500。 凡是符合这些格式的串行通信设备,理论上都可以和S7-200CPU通信。 自由口模式可以灵活应用。Micro/WIN的两个指令库(USS和ModbusRTU)就是使用自由口模式编程实现的。 在进行自由口通信程序调试时,可以使用PC/PPI电缆(设置到自由口通信模式)连接PC和CPU,在PC上运行串口调试软件(或者Windows的HyperTerminal-超级终端)调试自由口程序。 USB/PPI电缆和CP卡不支持自由口调试。 自由口通信要点 应用自由口通信首先要把通信口定义为自由口模式,同时设置相应的通信波特率和上述通信格式。用户程序通过特殊存储器SMB30(对端口0)、SMB130(对端口1)控制通信口的工作模式。详见下图
CPU通信口工作在自由口模式时,通信口就不支持其他通信协议(比如PPI),此通信口不能再与编程软件Micro/WIN通信。CPU停止时,自由口不能工作,Micro/WIN就可以与CPU通信。 通信口的工作模式,是可以在运行过程中由用户程序重复定义的。 如果调试时需要在自由口模式与PPI模式之间切换,可以使用SM0.7的状态决定通信口的模式;而SM0.7的状态反映的是CPU运行状态开关的位置(在RUN时SM0.7="1",在STOP时SM0.7="0") 自由口通信的核心指令是发送(XMT)和接收(RCV)指令。在自由口通信常用的中断有“接收指令结束中断”、“发送指令结束中断”,以及通信端口缓冲区接收中断。 与网络读写指令(NetR/NetW)类似,用户程序不能直接控制通信芯片而必须通过操作系统。用户程序使用通信数据缓冲区和特殊存储器与操作系统交换相关的信息。 XMT和RCV指令的数据缓冲区类似,起始字节为需要发送的或接收的字符个数,随后是数据字节本身。如果接收的消息中包括了起始或结束字符,则它们也算数据字节。 调用XMT和RCV指令时只需要指定通信口和数据缓冲区的起始字节地址。 XMT和RCV指令与NetW/NetR指令不同的是,它们与网络上通信对象的“地址”无关,而仅对本地的通信端口操作。如果网络上有多个设备,消息中必然包含地址信息;这些包含地址信息的消息才是XMT和RCV指令的处理对象。 由于S7-200的通信端口是半双工RS-485芯片,XMT指令和RCV指令不能同时有效。 XMT和RCV指令 XMT(发送)指令的使用比较简单。RCV(接收)指令所需要的控制稍多一些。 RCV指令的基本工作过程为: 在逻辑条件满足时,启动(一次)RCV指令,进入接收等待状态 监视通信端口,等待设置的消息起始条件满足,然后进入消息接收状态 如果满足了设置的消息结束条件,则结束消息,然后退出接收状态 所以,RCV指令启动后并不一定就接收消息,如果没有让它开始消息接收的条件,就一直处于等待接收的状态;如果消息始终没有开始或者结束,通信口就一直处于接收状态。这时如果尝试执行XMT指令,就不会发送任何消息。 所以确保不同时执行XMT和RCV非常重要,可以使用发送完成中断和接收完成中断功能,在中断程序中启动另一个指令。 在《S7-200系统手册》和Micro/WIN在线帮助中关于XMT和RCV指令的使用有一个例子。这个例子非常经典,强烈建议学习自由口通信时先做通这个例子。例程,见下图 字符接收中断 S7-200CPU提供了通信口字符接收中断功能,通信口接收到字符时会产生一个中断,接收到的字符暂存在特殊存储器SMB2中。通信口Port0和Port1共用SMB2,但两个口的字符接收中断号不同。 每接收到一个字符,就会产生一次中断。对于连续发送消息,需要在中断服务程序中将单个的字符排列到用户规定的消息保存区域中。实现这个功能可能使用间接寻址比较好。 对于高通信速率来说,字符中断接受方式需要中断程序的执行速度足够快。 一般情况下,使用结束字符作为RCV指令的结束条件比较可靠。如果通信对象的消息帧中以一个不定的字符(字节)结束(如校验码等),就应当规定消息或字符超时作为结束RCV指令的条件。但是往往通信对象未必具有严格的协议规定、工作也未必可靠,这就可能造成RCV指令不能正常结束。这种情况下可以使用字符接收中断功能。如下图
|






