
西门子模块6ES136-6BA00-0CA0型号介绍





西门子模块6ES136-6BA00-0CA0型号介绍
S7-200 SMART CPU 模块本体集成1 个以太网接口和1 个RS485 接口,通过扩展CM01 信号板,其通信端口数量多可增至3 个。可满足小型自动化设备连接触摸屏、变频器等第三方设备的众多需求。
以太网通信
所有CPU 模块标配以太网接口,支持西门子S7 协议、TCP/IP 协议、有效支持多种终端连接:
可作为程序下载端口(使用普通网线即可)
与SMART LINE HMI 进行通信
通过交换机与多台以太网设备进行通信,实现数据的快速交互
多支持4 个设备通信
串口通信
S7-200 SMART CPU 模块均集成1 个RS485 接口,可以与变频器、触摸屏等第三方设备通信。如果需要额外的串口,可通过扩展CM01 信号板来实现,信号板支持RS232/RS485 自由转换,多支持4 个设备。串口支持下列协议:
Modbus-RTU
PPI
USS
自由口通信
与上位机的通信
通过PC Access,操作人员可以轻松通过上位机读取S7-200 SMART 的数据,从而实现设备监控或者进行数据存档管理。
(PC Access 是专门为S7-200 系列PLC 开发的OPC 服务器协议,专门用于小型PLC 与上位机交互的OPC 软件)
运动控制
三轴 100 kHz 高速脉冲输出,.
运动控制基本功能
标准型晶体管输出CPU 模块,ST40/ST60 提供3 轴100 kHz 高速脉冲输出,支持PWM(脉宽调制)和PTO 脉冲输出
在PWM 方式中,输出脉冲的周期是固定的,脉冲的宽度或占空比由程序来调节,可以调节电机速度、阀门开度等
在PTO 方式(运动控制)中,输出脉冲可以组态为多种工作模式,包括自动寻找原点,可实现对步进电机或伺服电机的控制,达到调速和定位的目的
CPU 本体上的Q0.0,Q0.1 和Q0.3 可组态为PWM 输出或高速脉冲输出,均可通过向导设置完成上述功能
PWM 和运动控制向导设置
为了简化您应用程序中位控功能的使用,STEP 7- Micro/WINSMART 提供的位控向导可以帮助您在几分钟内全部完成PWM、PTO 的组态。该向导可以生成位控指令,您可以用这些指令在您的应用程序中对速度和位置进行动态控制。
PWM 向导设置根据用户选择的PWM 脉冲个数, 生成相应的PWMx_RUN 子程序框架用于编辑。
运动控制向导多提供3 轴脉冲输出的设置,脉冲输出速度从20 Hz 到100 kHz 可调。
运动控制功能特点
提供可组态的测量系统,输入数据时既可以使用工程单位(如英寸或厘米),也可以使用脉冲数
提供可组态的反冲补偿
支持、相对和手动位控模式
冗余模式说明
升级到V4.0的环网冗余的WBM菜单

图5 升级到V4.0的环网冗余的WBM菜单
Enable ring redundancy使能环网冗余:
如果模块是环网的一部分,则需使能;否则取消使能。
Redundancy Mode冗余模式:设置模块在环网中的角色。
Automatic Redundancy Detection自动冗余检测用于自动设置冗余模式。
在 "Automatic Redundancy Detection" 模式下,X-200工业以太网交换机自动检测在环网中是否有一个"HSR Manager". 如果有,设备自动适应"HSR Client"的角色.如果没有发现HSR manager ,所有设置为"Automatic Redundancy Detection"的设备相互协商以建立那个设备作为"MRP Manager"的角色. 其它设备自动设置成"MRP Client"模式.
MRP Client 介质冗余客户端用以选择"MRP Client" 角色。
在采用 MRP的环网中, 至少有一个设备设置成"AutomaticRedundancy Detection" 或"MRP Manager (Auto)/Client"模式. 其它的设备可以选择"MRP Client" 角色. 如果环网中所有设备除了一个设备设置成"MRP Client", 这台设备自动适应 "MRP Manager"角色.如果环网有非Siemens设备,选择"MRP Client" 模式。
MRP Manager(Auto)/Client:介质冗余管理器(自动)/客户端
如果设置成这个模式, 这台设备企图自动适应 "MRP Manager"角色。如果环网中有几个设备设置成这个"MRP Manager(Auto)/Client"模式, 其中的一个设备自动采用"MRP Manager"模式。其它设备采用"MRP Client"模式.
HSR Client:高速冗余客户端
如果工业以太网交换机X-200希望使用用热备功能,可以选择"HSR Client"角色。
HSR Manager 当设置 HSR 环网时, 只有一个模块必须被设成HSR manager模式。
注意:
在基本的设定中, "Automatic Redundancy Detection" 模式被预先选择。
6.总结和注意事项
SCALANCE X200升级到V4.X后可用MRP和HSR方法构成环网。X-200以太网交换机从版本V3.1及更低版本、X-300 and X-400以太网交换机从版本V2.3及更低版本、OSMs/ESMs只支持介质冗余HSR方法. 如新老版本混合构成的环网,只能用HSR 方法。
在环网中断后,MRP方法网络重组时间为0.2秒;HSR方法网络重组时间为0.3秒.
如采用本文第四章的缺省环网端口,不需要额外的设置就能互联形成一个MRP环网。缺省的模式"Automatic Redundancy Detection" 自动设置成环。
如果设置一个HSR环,只能有一个设备设置成"HSR Manager"模式。环网中所有其它的设备必须设置成"Automatic Redundancy Detection"或"HSR Client".
MRP和HSR方法在一个环网中,不能混合使用。
故障处理经验:
如果环网管理器出现other RM in ring的报警,可查看是否环网断线或确实设置了多个RM.正常时交换机RM为常亮绿灯,闪烁绿灯为不正常状态。
必须确保实际环网端口和设置的环网端口一致
(plc编程初学者的)请高手勿喷!那么大家请看下图,如图1:
首先什么是:点动控制呢?大家看一下下面这个图,如图2:
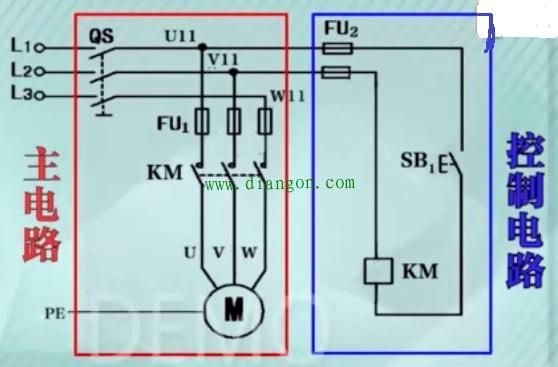
这个是一个传统的控制电路,我们这个电路它分为:主电路和控制电路两部分。 1、主电路有:QS(断路器)、FU(熔断器)、KM(接触器主触点)M(电动机)所组成。2、控制电路(也称为辅助电路):由FU(熔断器)、SB(常开触点)、KM(接触器线圈)构成。大家:再看下面这个图,如图3:
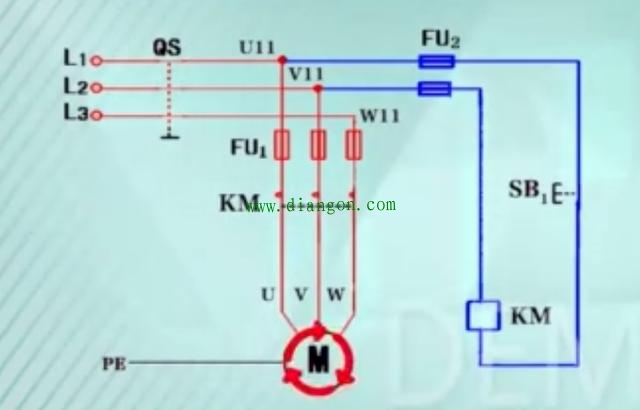
在电路工作时,我们按下按钮SB1,接触器线圈得电,衔铁吸合带动三对主触点闭合,电动机接通三相电源启动正转,当我们把按钮放开后,接触器线圈断电,电动机断电停止转动,这种控制方式我们称之为点动控制。它主要用于设备的升降、定点移动控制、以及生产设备的调试,在我们实际的应用当中,接触器控制电路相对体积较大,长时间的机械运动会导致按钮、接触器等元器件的可靠性降低,用到的触点也是有限的,如果我们要改变控制功能,那么电路还需要重新搭建,工作量比较大而且容易出错,正对这些不足,我们就引用PLC来实现,那么什么是PLC呢?请大家再看下面这个图,如图4:

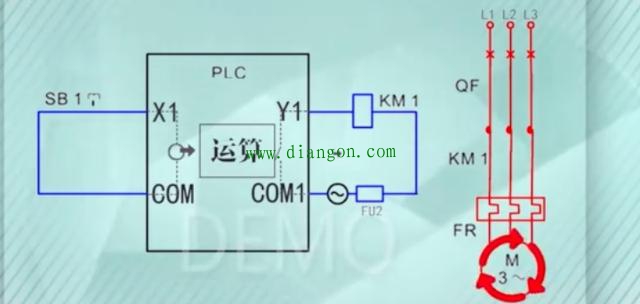
这里我们以三菱公司生产的FX2NPLC为例:左边有那麽多螺丝的是PLC的信号输入点X主要适用于按钮、开关、传感器等输入信号。右边这一块呢,它是PLC的输出点Y,用来向外部接触器、电磁阀、指示灯、报警装置等输出设备发送信号、中间有CPU和存储器、主要是控制整个系统、协调系统内部各部分的工作,以及存储程序和数据的功能。如果改变控制功能,只需要修改内部程序,外部电路不需要我们去重新调整,以便于我们调试,硬件又错误少,PLC内部程序中内部继电器的使用也不受限制。那么我们用PLC如何实现电动机的点动控制呢?大家请看下图,如图5:
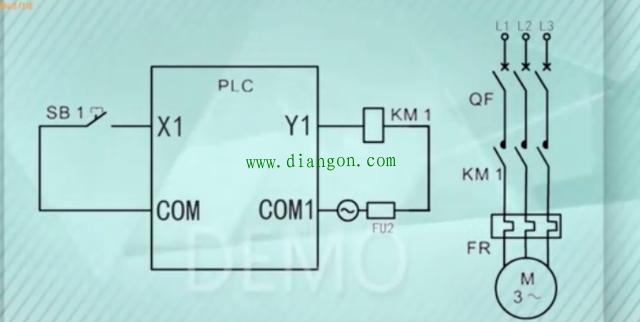
常开按钮SB1接到PLC的输入点X1,当我们把SB1按钮按下输入回路就接通了,X1就得到一个IO信号,X1的IO信号送到PLC内部进行运算,就输出一个信号,输出的信号Y1将输出回路接通,KM1线圈得电,对应的主电路中的KM主触点就吸合了,我们再看下面这个图,如图6:
我们和上面的图对比一下。PLC内部是根据什么来进行控制运算的呢?我们再往下看,如图7:
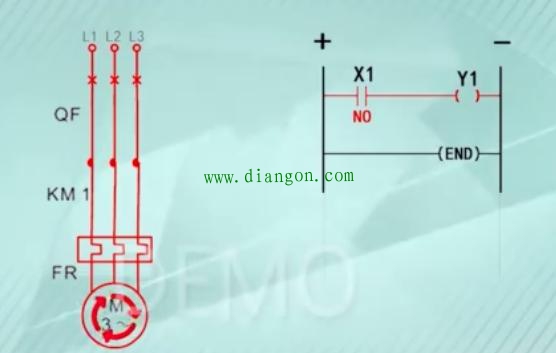
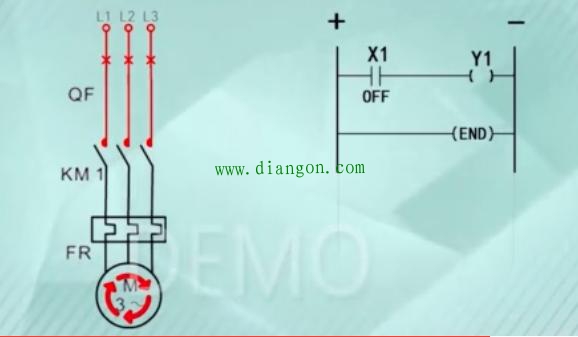
我们看啊,左边那根竖线是左母线,右边那根是右母线,右母线我们可画可不画,我们假想,做母线接电源的正极,右母线接电源的负极,输入继电器X1设置成常开触点的形式,串联输出线圈Y1,当X1等于NO状态时,就好比两条母线之间的回路接通了,我们可认为有个假想的电流流过该回路,看下图,如图8:
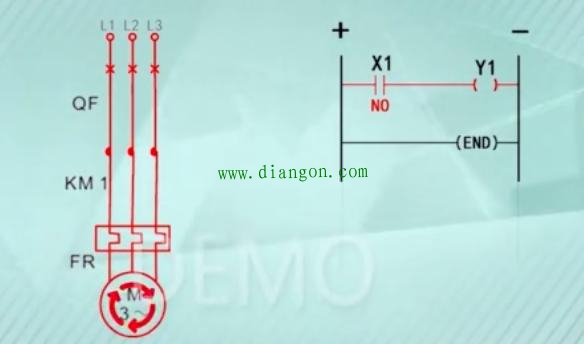
线圈就得电导通了,大家看见没有,右上角那个梯形图红色的那根线,对应的Y1触点(线圈)就会动作,主电路中的接触器KM1主触点吸合电动机就正转工作。看见没有?左边KM1主触点吸合了,变成直线了,同时变红了证明得电了,当我们松开按钮的时候,又看下面的图,如图9:
这个图有点多,大家别骂我哈,主要是想让大家弄懂弄明白。
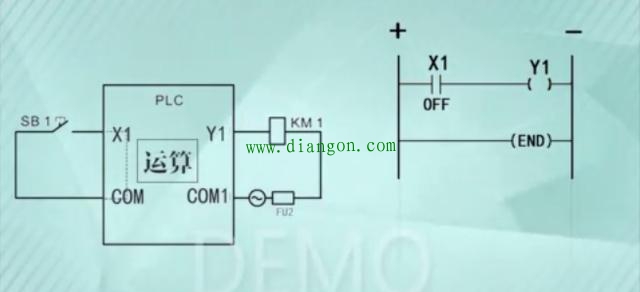
如上图,我们松开按钮时,也就是说X1处于OFF的时候母线之间的回路开路,Y1线圈就断电了,主触点复位断开,电动机就会失电停止工作。这样点动控制的设计就完成了,我们把设计的这个图叫做《梯形图》,这就是PLC内部的运算控制。后我们借助GX仿真软件把设计好的梯形图写入到PLC当中去。如图10:
连接好外部X和Y的供电电路,按下启动按钮,电动机启动,松开按钮电动机停止工作。
