6ES7511-1AK02-0AB0安装调试







6ES7511-1AK02-0AB0安装调试
西门子plc的立即写操作
对于立即写(Immediate Write)功能,必须如下面举例所示,生成符号程序段。
对于有时间限制的应用,可以以比每OB1 扫描循环一次的正常情况快的速度,将一个数字
量输出的当前状态发送到输出模板。立即写功能可以在扫描立即写逻辑程序级的同时,将
一个数字量输出写入输出模板。否则,当 Q存储区使用 P存储状态更新时,必须等到下一
OB1扫描循环结束。
为了将一个输出立即写入输出模板,应使用外围输出(PQ)存储区,而不使用输出(Q)
存储区。外围输出存储区可以作为一个字节、一个字或一个双字读取。因此,通过一个线
圈元素,不能更新一个单独的数字量输出。为了将一个数字量输出的状态立即写入输出模
板, 包含相关位的Q存储器的字节、 字或双字可以有条件地复制到相应的PQ存储器中 (直
接输出TPC1062K的模板地址)。
小心
• 由于 Q 存储器的整个字节被写入输出模板,当进行立即输出时,该字节中的所有输出
位都将被更新。
• 如果一个输出位在不应发送到输出模板中的整个程序中出现中间状态(1/0),立即写
功能会造成危险情况(输出瞬时脉冲)。
• 作为一般设计规则,在一个MT6100I的程序中,外部输出模板只能认为是一个线圈。如果遵守该
设计规则,可以避免使用立即输出时的大多数潜在问题。
举例
等效于立即写入外围数字量输出模板 5通道1的梯形逻辑程序段。
寻址输出Q字节 (QB5) 的位状态可以修改, 也可以保持不变。 Q5.1被赋给程序段1 中I0.1
的信号状态。QB5被复制到相应的直接外围输出存储区(PQB5)。
字PIW1包含I1.1的立即状态。 PIW1与 W#16#0002进行与 (AND) 逻辑运算。 如果 PB1
中的 I1.1(第 2位)为“1",则结果非“0"。如果 WAND_W 指令的结果不等于“0",
则接点“A<>0"通过电压
20 Hz 至 2 kHz 下为 1 g
对于 SIMOTICS M-1PH8 型号的所有主轴电机,以下限值适用于从外部源传送到电机的(引入)振动值:
振动
频率
1PH808/1PH810/1PH813/1PH816
的振动值
< 6.3 Hz
振动位移 s
≤ 0.16 mm (0.006 in)
6.3 ... 250 Hz
振动速度 Vrms
≤ 4.5 mm/s (0.18 in/s)
> 250 Hz
振动加速度 a
≤ 10 m/s2 (32.8 ft/s2)
对于采取强制通风冷却的电机,轴向和径向加速度的限值限制在 10 m/s2 (32.8 ft/s2)。
振动
频率
以下电机的振动值:
1PH818/1PH822/1PH828/1PH835
1PH718/1PH722/1PH728
1PL618/1PL622/1PL628
< 6.3 Hz
振动位移 s
≤ 0.25 mm (0.099 in)
6.3 ... 63 Hz
振动速度 Vrms
≤ 7.1 mm/s (0.28 in/s)
> 63 Hz
振动加速度 a
≤ 4.0 m/s2 (13.1 ft/s2)
对于 SIMOTICS T-1FW3 型号的所有转矩电机,以下限制适用于从外界引入电机的(引入)振动值:
振动
频率
1FW3 的振动值
< 6.3 Hz
振动位移 s
≤ 0.26 mm (0.01 in)
6.3 ... 63 Hz
振动速度 Vam
≤ 7.1 mm/s (0.28 in/s)
> 63 Hz
振动加速度 a
≤ 4.0 m/s2 (13.1 ft/s2)
运行不受限制的温度范围:-15 至 +40 °C(5 至 104 °F)
若以额定频率运行,冷却液温度为 40 °C (104 °F) 且安装高度为海拔 1000 m,则可以在额定功率(额定转矩)下按照连续工作制 (S1) 工作,且符合 EN 60034-1。
除了 SIMOTICS M-1PH8 电机外,所有电机均适用于温度等级 155 (F) 并根据 155 (F) 温度等级使用。SIMOTICS M-1PH8 电机适用于温度等级 180 (H)。对于所有其它情况,必须应用下表给出的系数来确定容许输出(转矩)。
自冷式 SIMOTICS T-1FW6 电机的冷却剂温度范围为 -5 °C 至 +40 °C(23 °F 至 104 °F)。
安装海拔
冷却剂温度
(环境温度)
m (ft)
< 30 °C
(86 °F)
30 ... 40 °C
(86 ... 104 °F)
45 °C
(113 °F)
50 °C
(122 °F)
1000 (3281)
1.07
1.00
0.96
0.92
1500 (4922)
1.04
0.97
0.93
0.89
2000 (6562)
1.00
0.94
0.90
0.86
2500 (8203)
0.96
0.90
0.86
0.83
3000 (9843)
0.92
0.86
0.82
0.79
3500 (11484)
0.88
0.82
0.79
0.75
4000 (13124)
0.82
0.77
0.74
0.71


选型和订货数据中的轴转矩单位为 Nm。
M rated = 9.55 × Prated × 1000/nrated
P rated 以 kW 为单位的额定功率
n rated 以 rpm 单位的额定转速
M rated 以 Nm 为单位的额定转矩
M rated = Prated × (5250/nrated)
P rated 以 hp 为单位的额定功率
n rated 以 rpm 单位的额定转速
M rated 以 lbf-ft 为单位的额定转矩
DURIGNIT IR 2000 绝缘材料系统DURIGNIT IR 2000 绝缘材料系统包含高质量的漆包线和绝缘材料,并用不含溶剂的树脂进行浸渍。
这样的绝缘材料系统可确保这些电机具有很高的机电稳定性、突出的实用价值和很长的使用寿命。
绝缘系统可以在很大程度上防止绕组因有害气体、烟雾、灰尘、油以及很高的空气湿度而受损。该系统可承受常规振动应力。
特性曲线
运行于变频器上的同步电机随磁场减弱的转矩特性(示例)
n n 额定转速
n max Inv 允许大高电气限制转速
n max mech 允许的高机械限制转速
M 0 静态扭矩
M rated 额定转速下的额定转矩
M max Inv 使用推荐的逆变装置可达到的大转矩
M max 允许的大转矩
电机保护
1.永宏plc: FBS-24MCT 1 台
2.GSK 伺服1 套: Di20-M10B(驱动器)/80SJT-M032E(电机)
3.DC24V 开关电源1 个
4.信号线若干
查看驱动器引脚定义并选择控制模式
位置控制模式:查看伺服引脚定义,这里用少的信号线实现电机转动。
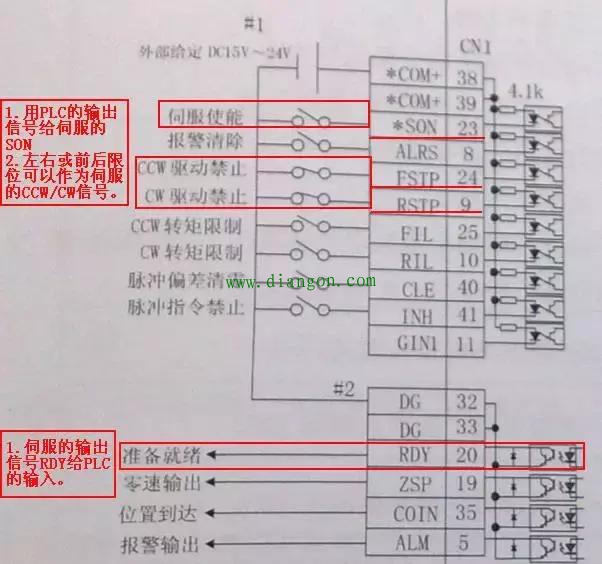
SON:为ON 时,开启伺服使能。当然伺服使能功能可以通过参数来修改,该信号可由参数PA54 设置。
PA54=0:只有当外部输入信号SON 为ON 时,电动机才能被使能;
PA54=1:驱动单元内部强制电动机使能,而不需要外部输入信号SON。
CCW/CW:驱动禁止信号,一般和行程开关配合使用,避免超程,该信号可由参数PA20 设置。
PA20=0:使用驱动禁止功能;
PA20=1:不使用驱动进制功能。
RDY:驱动单元准备好信号,当电机通电励磁时该信号有输出。
位置指令输入信号
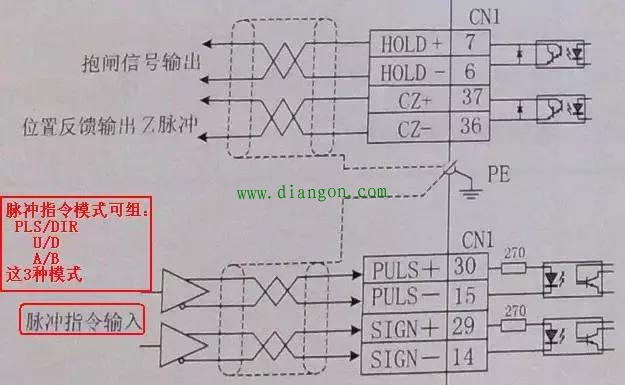
这里位置输入信号可以采用差分驱动或者单端驱动接法,由于选用的FBS-24MCT 为集电极开路
输出形式,所以采用单端驱动接法。
伺服驱动单端驱动方式限定外部电源大电压为25V 时,需要串接一个限流电阻R
依据:Vcc=24V,R=1.3KΩ~2KΩ;Vcc=12V,R=510KΩ~820KΩ;Vcc=5V,R=0;
频率限制为:
PLS/DIR:高脉冲频率500KHZ
U/D:高脉冲频率500KHZ
A/B:高脉冲频率300KHZ
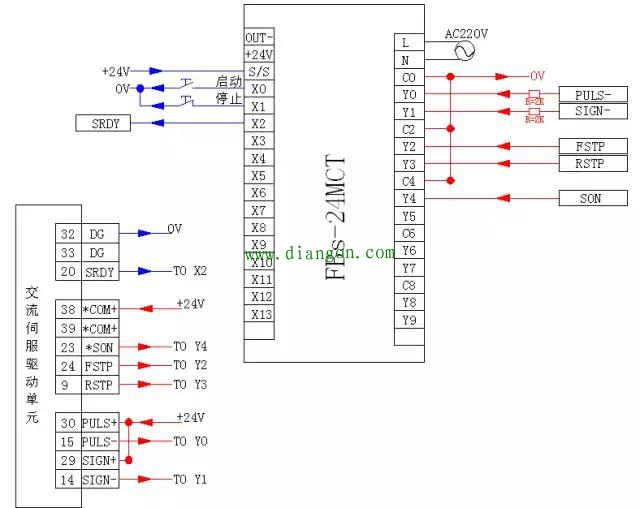
控制线制作
GSK 随机附带一个44 针插座,依据引脚图,把需要的控制信号接线出来。在这里把有可能用到
的信号线都接出来,但是这些信号在伺服控制中并不都是必要的,下图中用蓝色线表示伺服的输出
信号给PLC 的输入,红色表示PLC 的输出给伺服的输入,另外开关电源的正、负分别用红、蓝表示。
1)选取需要的控制信号
38引脚——24V、33引脚——0V
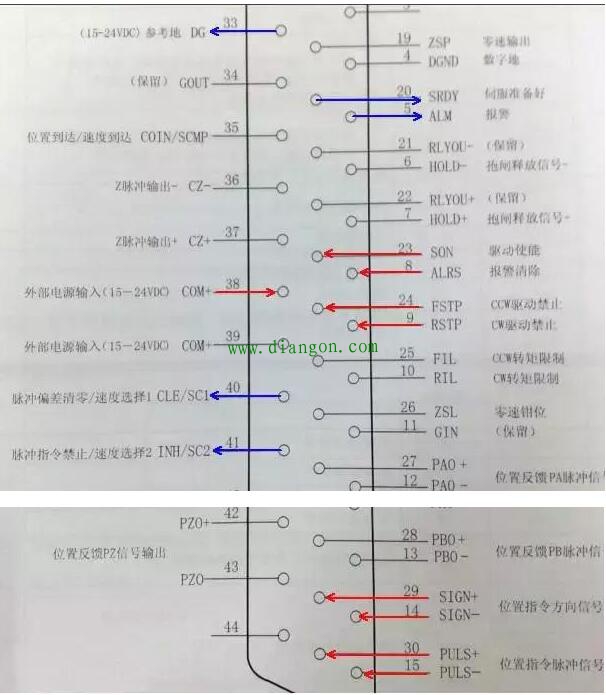
2)伺服同PLC 的接线图
这里从伺服给PLC 的输入信号只取了SRDY,PLC 给伺服的信号有SON、FSTP(CCW)、RSTP(CW)、PULS/SIGN 这几个信号。
伺服调试
取出驱动器、电机,电机至驱动的编码器连接线和电机至驱动的电源线,出厂都已配置好,这里只要按照指示接好即可。
把PLC 至驱动器的控制信号线接好。
1.伺服的手动调试
1)伺服参数设定
GSK 伺服上电之后,可以先采用驱动器本身自带的手动功能,该功能模式下,伺服的转动由驱动器按键来控制,进入PA 参数菜单,设置一下参数:
PA4=3:手动方式,在SR-菜单下操作,用↑、↓键进行加、减速操作。
PA20=1:驱动禁止功能无效,此时只是利用驱动器本身来调试,所以把CCWCW 功能先屏蔽。
PA54=1:驱动单元内部强制电机使能,而不需要外部输入信号SON。
参数设置完成以后,保存后下电。diangon.com
2)手动运行步骤
1.驱动器上电,显示R - 0,是电机运行速度监视窗口。
2.检查PA1 参数是否和使用的电机代码一致。
3.以上2 步都无误后,进入“SR- /SR-RED” 菜单下后,按↑、↓键开始运行电机。
2.PLC 控制运行伺服在手动调试下运行正常,现在进入PLC 的上位控制,该控制中PLC 的从伺服引入的IO 如下:
Input:
SRDY——X2
Output:
PULS-: Y0
SIGN-: Y1
CCW: Y2
CW: Y3
SON: Y4
为了控制方便,这里先把CCWCW 信号使能屏蔽。
1) 伺服参数设置
PA4=0: 位置方式。
PA12:电子齿轮倍频系数(电子齿轮分子),设为2。
PA13: 电子齿轮分频系数(电子齿轮分母),设为1。
PA14=0:位置方式下,脉冲输入模式:脉冲+方向。
PA15=0: 位置指令方向维持原指令方向。
PA20=1: 驱动禁止功能无效(即屏蔽CCW/CW 使能信号)。
PA54=0: 外部SON 使能。
参数修改完毕后,存储后下电,重新上电。
2) 相关计算
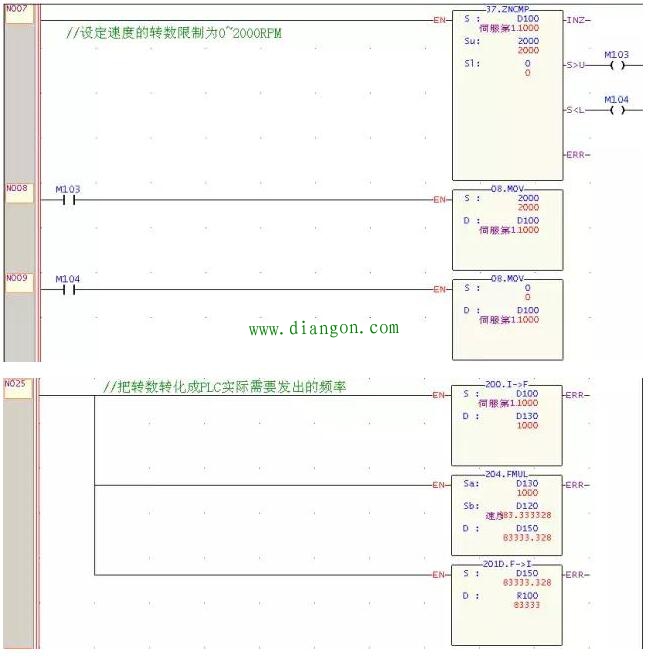
在这里先做一个伺服电机的多段速运行程序,运动过程
1.以速度1000RPM 转10 圈
2.接着以速度1200RPM 转20 圈
3.接着以速度1400RPM 转30 圈
4.接着以速度1600RPM 转40 圈
5.接着以速度1800RPM 转50 圈
6.接着以额定速度2000RPM 运行60 圈
7.停顿一定时间后,从第1 步开始重复。
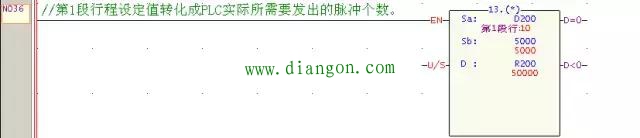
由手册知道,伺服每转1 圈,编码器反馈10000PS,又电子齿轮设定为2,所以PLC 每发出5000PS,伺服就转动1 圈
即段行程10 圈对应的脉冲数=10 圈×5000PS/圈=50000PS,其它段的行程脉冲计数同此式。
把伺服需要的速度转化成PLC 的脉冲数,以1000RPM 为例,假设PLC 需要发出的脉冲数为X,
电子齿轮设定是2,则有
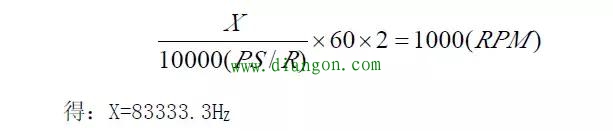
由此公式,可求得其它速度所对应的PLC 脉冲数。
3) PLC 参数的设置
FBS-24MCT 的脉冲输出点共有4 轴( 8 点),为Y0~Y7,默认Y0~Y3 为高速200K,Y4~Y7 为中速20K。
要使得PLC 的高速点输出脉冲时,需要先对这几个点的输出进行组态,点击永宏编程软件菜单栏中的“专案IO 组态”进入组态页面

4) 程序的编写
设置完成之后即可进入程序的编写。
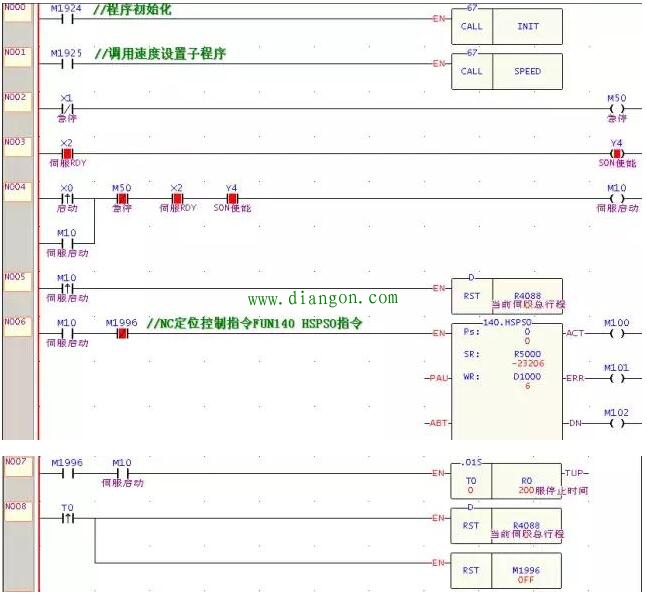
5) NC定位表格的编辑
用鼠标左键点击FUN140 指令,然后在英文输入状态下,按键盘上的Z 键进入NC 定位
表格的编写,终结果如下

6)子程序内容
INIT 子程序主要是做一些初始化,如下
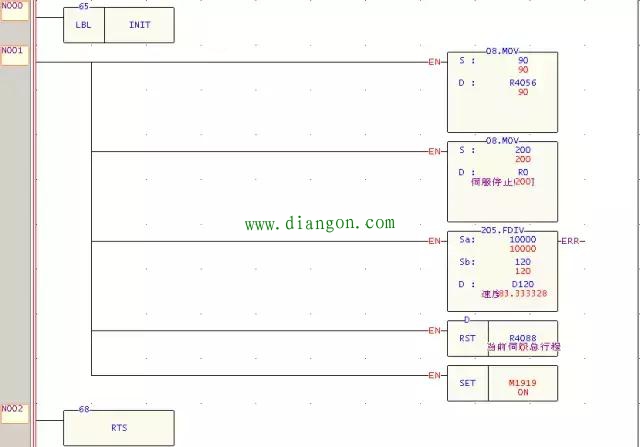
SPEED 子程序,主要把输入的速度和形成转化成PLC 所需要产生的脉冲个数,这里以第1段速度和行程的换算为例,由于这里伺服的额定转速为2000RPM,所以在速度设定的时候,要防止输入转数超过该值。
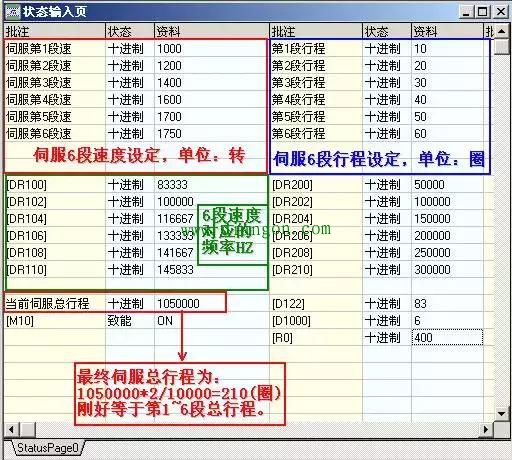
7) 上电运行调试
程序编写完成后,让PLC 处于RUN 状态,在输入页中进行数值监控,如下
总结:由于该示例中PLC 的输入信号只从伺服抓取了SRDY,其它点位的接入同SRDY 的接法一样。PLC输出给伺服的信号只有PLSDIR、SON 这3 个信号,其它信号的接法类似。GSK 伺服只需要极少的几根控制线就可以实现伺服的运转,永宏PLC 的定位指令全部在NC 表格中填写即可。
附图: