西门子电机6SL3120-1TE32-0AA3详细说明






西门子电机6SL3120-1TE32-0AA3详细说明
主要支持的硬件有:
(1)电源(PS)
电源模块提供了机架和CPU内部的供电电源,置于1号机架的位置。
(2)中央处理器(CPU)石家庄西门子(中国)授权总代理商石家庄西门子(中国)授权总代理商石家庄西门子(中国)授权总代理商为模块分配参数,通过嵌入的MPI总线处理编程设备和PC、模块、其它站点之间的通讯,并可以为进行DP主站或从站操作装配一个集成的DP接口。置于2号机架。
(3)接口模块(IM)
接口模块将各个机架连接在一起。不同型号的接口模块可支持机架扩展或PROFIBUS DP连接。置于3号机架,没有接口模块时,机架位置为空。
(4)信号模块(SM)
通常称为I/O(输入/输出)模块。测量输入信号并控制输出设备。信号模块可用于数字信号和模拟信号,还可用于进行连接,如传感器和启动器的连接。
(5)功能模块(FM)
用于进行复杂的、重要的但独立于CPU的过程,如:计算、位置控制和闭环控制。
(6)通讯处理器(CP)
模块化的通讯处理器通过连接各个SIMATIC站点,如:工业以太网,PROFIBUS或串行的点对点连接等。
后三个模块在机架上可以任意放置,系统可以自动分配模块的地址。
需要说明的是,每个机只能安装8个信号模块、功能模块或通讯模块。如果系统任务超过了8个,则可以扩展机架(每个带CPU的中央机架可以扩展3个机架)。
各个模块的性能具体如下:
(1)电源模块(PS)
电源模块用于将SIMATIC S7-300 连接到120/230V AC电源。
(2)CPU模块
各种CPU 有各种不同的性能,例如,有的CPU 上集成有输入/输出点,有的CPU上集成有PROFI- BUS-DP通讯接口等。
以上只是列出了部分指标,设计时还要参看相应的手册。
(3)接口模块
接口模块用于多机架配置时连接主机架(CR)和扩展机架 (ER)。S7-300通过分布式的主机架(CR)和3个扩展机架(ER),可以操作多达32个模块。运行时无需风扇。
(4)信号模块
信号模块用于数字量和模拟量输入/输出,又分DI/DO(数字量输入/输出)和AI/AO(模拟量输入/输出)模块。
①数字量输入模块:
②数字量输出模块:
③数字输入/输出模块:
④继电器输出模块:
⑤模拟量输入模块
⑥模拟量输出模块:
⑦模拟量输入/输出模块:
(5)功能模块
西门子S7-300功能模块模块适用于各种场合,功能块的所有参数都在STEP7中分配,操作方便,而且不必编程。包括:计数器模块(FM350),定位模块(FM351),凸轮控制模块(FM352),闭环控制模块(FM355)等许多用于特定场合的模块。
(6)通讯模块(CP)
S7-300通讯模块是用于连接网络和点对点通讯用的模块,比如:用于S7-300和SIMATIC C7通过PROFIBUS通讯的模块CP343-5,用于S7-300和工业以网通讯的模块CP343-1及CP343-1 IT等
一、选型型号
CP 243-1 是一种通讯处理器,设计用于在S7-200 自动化系统中运行。它可用于将S7-200 系统连接到工业以太网(IE)中。CP 243-1 有助于 S7 产品系列通过因特网进行通讯。因此,可以使用STEP 7 Micro/WIN 32,对S7-200 进行远程组态、编程和诊断。而且,一台S7-200 还可通过以太网与其它S7-200、S7-300 或S7-400 控制器进行通讯。并可与OPC 服务器进行通讯。
在开放式SIMATIC NET 通讯系统中,工业以太网可以用作协调级和单元级网络。在技术上,工业以太网是一种基于屏蔽同轴电缆、双绞电缆而建立的电气网络,或一种基于光纤电缆的光网络。工业以太网根据标准IEEE 802.3 定义
配置主从通讯方式
根据实际使用的主从通讯方式,定义传输的数据,下表以网络通讯为例的主从通讯数据表(仅作参考,实际设定根据需要定义):
3.3 配置主从工作模式
完成基本调试后,确定电机的优化、运行都正常后,根据配置的主从方案,来进行主从工作模式的设置。
3.3.1 配置直接转矩分配方式
在直接转矩工作模式时,主机工作在速度模式,从机工作在转矩模式,而从机设定为转矩控制方式共有两种不同的方法:
a. 通过参数直接选择转矩工作模式
选择从机转矩工作模式P1300=22 or 23(图11),
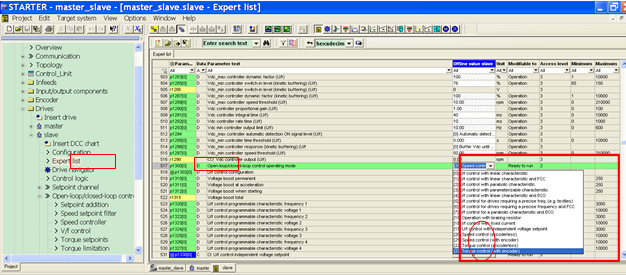
图11 电机工作模式设定
然后在转矩的给定值P1503处()选则主机的转矩设定值r079(实际值r080也可以,但是设定值相对波动小)(图12)。
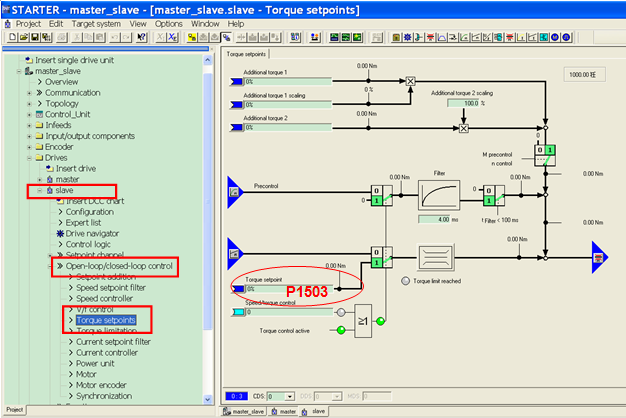
图12
将从机的控制字命令源连接到主机的控制字,用来得到相同的启动逻辑,保证主从设备的同时启动、停止,并实现故障保护。(图13 )
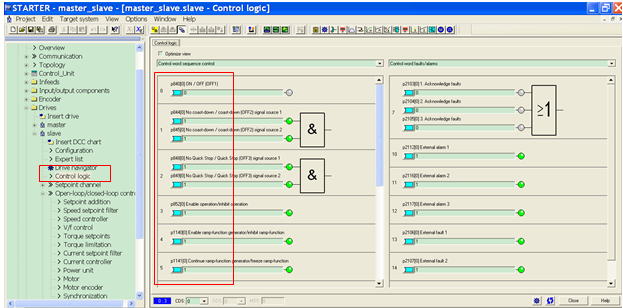
图13
b. 通过参数切换,旁路速度调节器的输出到转矩直接设定
选择从机转矩工作在速度模式,P1300=20 or 21,然后设定P1501切换速度模式到转矩模式,P1503转矩设定源链接主机的转矩设定r079(图15),
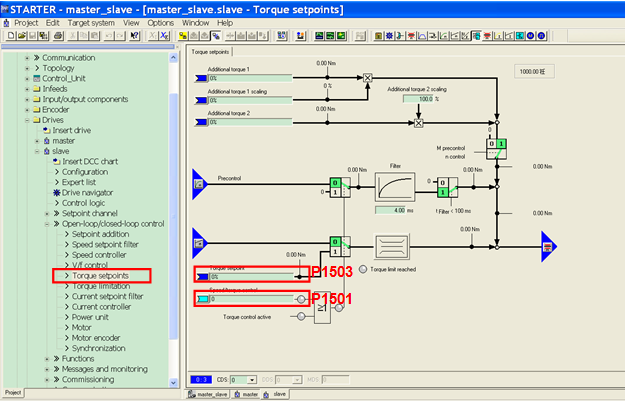
图15
3.3.2 速度偏差与转矩限幅方式
在速度偏差与转矩限幅时,主机从机都工作在速度模式,P1300=20or 21,从机的设定速度在主机设定速度的基础上附加一个偏差速度?V(通常10%,仅作参考),超前或滞后的关系由实际的电机位置决定见下图:
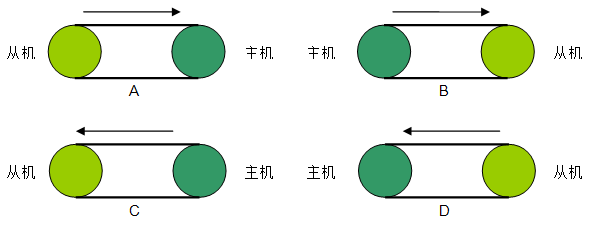
图16
A方案工作时:从机的速度设定值滞后主机速度设定值,Nset从= Nset主-?V;
B方案工作时:从机的速度设定值超前主机速度设定值,Nset从= Nset主+?V;
C方案工作时:从机的速度设定值超前主机速度设定值,Nset从= Nset主+?V;
D方案工作时:从机的速度设定值滞后主机速度设定值,Nset从= Nset主-?V;
然后设定转矩限幅的源P1522连接到主机的转矩设定值r079(如图17)
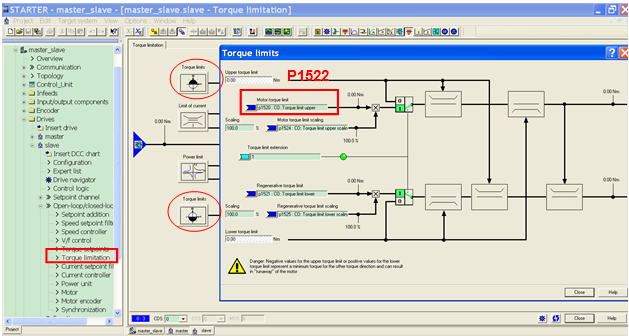
图17
当启动后,由于速度偏差的存在,从机与主机间的材料迅速拉紧,从机的速度环快速进入饱和状态,输出转矩由转矩限幅决定,从而实现了主从负荷分配。
同时对于可能断带的材料,该方式起到很好的保护作用。当材料断开,从机从速度环快速退饱和,转入速度闭环,不会导致飞车
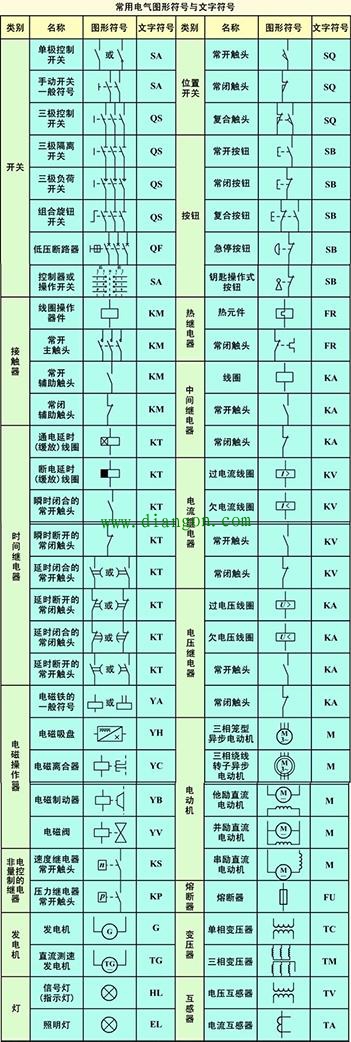
| 1、结合电工基础理论识图 要想搞清电路的电气原理,必须具备电工基础知识,如三相异步电动机的旋转方向是由通入电动机的三相电源的相序决定的,改变电源的相序可改变电动机的转向。 2、结合电器元件的结构和工作原理识图 看电路图时应搞清楚电器元件的结构、性能、在电路中的作用、相互控制关系,才能搞清电路的工作原理。 3、结合典型电路识图 一张复杂的电路图细分起来是由若干典型电路组成,因此熟悉各种典型电路,能很快分清主次环节。 4、结合电路图的绘制特点识图 绘制电气原理图时,主电路绘制在辅助电路的左侧或上部,辅助电路绘制在主电路的右侧或下部。同一元件分解成几部份,绘在不同的回路中,但以同一文字符号标注。回路的排列,通常按元件的动作顺序或电源到用电设备的连接顺序,水平方向从左到右、垂直方向从上到下绘出。了解电气图的基本画法,就容易看懂电路的构成情况,搞清电器的相互控制关系,掌握电路的基本原理。
|