6SL3330-7TE41-0AA3详细说明






6SL3330-7TE41-0AA3详细说明
S7-200 SMART CPU 模块本体集成1 个以太网接口和1 个RS485 接口,通过扩展CM01 信号板,其通信端口数量*多可增至3 个。可满足小型自动化设备连接触摸屏、变频器等第三方设备的众多需求。
以太网通信
所有CPU 模块标配以太网接口,支持西门子S7 协议、TCP/IP 协议、有效支持多种终端连接:可作为程序下载端口(使用普通网线即可)
与SMART LINE HMI 进行通信
通过交换机与多台以太网设备进行通信,实现数据的快速交互
*多支持4 个设备通信
串口通信
S7-200 SMART CPU 模块均集成1 个RS485 接口,可以与变频器、触摸屏等第三方设备通信。如果需要额外的串口,可通过扩展CM01 信号板来实现,信号板支持RS232/RS485 自由转换,*多支持4 个设备。串口支持下列协议:Modbus-RTU
PPI
USS
自由口通信
与上位机的通信
通过PC Access,操作人员可以轻松通过上位机读取S7-200 SMART 的数据,从而实现设备监控或者进行数据存档管理。
(PC Access 是专门为S7-200 系列PLC 开发的OPC 服务器协议,专门用于小型PLC 与上位机交互的OPC 软件)
三轴 100 kHz 高速脉冲输出,完美实现定位.
运动控制基本功能
标准型晶体管输出CPU 模块,ST40/ST60 提供3 轴100 kHz 高速脉冲输出,支持PWM(脉宽调制)和PTO 脉冲输出
在PWM 方式中,输出脉冲的周期是固定的,脉冲的宽度或占空比由程序来调节,可以调节电机速度、阀门开度等
在PTO 方式(运动控制)中,输出脉冲可以组态为多种工作模式,包括自动寻找原点,可实现对步进电机或伺服电机的控制,达到调速和定位的目的
CPU 本体上的Q0.0,Q0.1 和Q0.3 可组态为PWM 输出或高速脉冲输出,均可通过向导设置完成上述功能
西门子PLC模块6ES7214-1AD23-0XB8 PWM 和运动控制向导设置
为了简化您应用程序中位控功能的使用,STEP 7- Micro/WINSMART 提供的位控向导可以帮助您在几分钟内全部完成PWM、PTO 的组态。该向导可以生成位控指令,您可以用这些指令在您的应用程序中对速度和位置进行动态控制。
PWM 向导设置根据用户选择的PWM 脉冲个数, 生成相应的PWMx_RUN 子程序框架用于编辑。
运动控制向导*多提供3 轴脉冲输出的设置,脉冲输出速度从20 Hz 到100 kHz 可调。运动控制功能特点
提供可组态的测量系统,输入数据时既可以使用工程单位(如英寸或厘米),也可以使用脉冲数
提供可组态的反冲补偿
支持、相对和手动位控模式
支持连续操作
提供多达32 组运动动包络,每组包络*多可设置16 种速度
提供4 种不同的参考点寻找模式,每种模式都可对起始的寻找方向和*终的接近方向进行选择
运动控制的监控
为了帮助用户开发运动控制方案,STEP 7- Micro/WIN SMART 提供运动控制面板。其中的操作、组态和包络组态的设置使用户在开发过程的启动和测试阶段就能轻松监控运动控制功能的操作。使用运动控制面板可以验证运动控制功能接线是否正确,可以调整组态数据并测试每个移动包络
显示位控操作的当前速度、当前位置和当前方向,以及输入和输出LED(脉冲LED 除外)的状态
查看修改在CPU 模块中存储的位控操作的组态设置

PLC机型的选择步骤与原则
随着PLC技术的发展,PLC产品的种类也越来越多。不同型号的PLC,其结构形式、性能、容量、指令系统、编程方式、价格等也各有不同,适用的场合也各有侧重。因此,合理选用PLC,对于提高PLC控制系统的技术经济指标有着重要意义。
PLC的选择主要从PLC的机型、容量、I/O模块、电源模块、特殊功能模块、通信联网能力等方面加以综合考虑。
西门子触摸屏变量指针的应用 在有的项目中,们需要在触摸屏上来实现多路数值的显示,比如说们需要显示通过模拟量模块采样过来的温度值。因选择的触摸屏的画面比较小,们不能在触摸屏上显示全部的温度值的时候,如果要实现这样的功能,可能会选择在多个画面来做这个温度的显示,但对于西门子的触摸屏来说,们可以使用它的变量指针化的这个功能来实现在一个画面上对所有的温度值进行显示,但同时它也有缺点,就是在同一时刻只能显示一个数字
PLC机型的选择
PLC机型选择的基本原则是在满足功能要求及保证可靠、维护方便的前提下,力争的性能价格比。选择时主要考虑以下几点:
(一) 合理的结构型式
PLC主要有整体式和模块式两种结构型式。
整体式PLC的每一个I/O点的平均价格比模块式的便宜,且体积相对较小,一般用于系统工艺过程较为固定的小型控制系统中;而模块式PLC的功能扩展灵活方便,在I/O点数、输入点数与输出点数的比例、I/O模块的种类等方面选择余地大,且维修方便,一般于较复杂的控制系统。
(二) 安装方式的选择
PLC系统的安装方式分为集中式、远程I/O式以及多台PLC联网的分布式。
集中式不需要设置驱动远程I/O硬件,系统反应快、成本低;远程I/O式适用于大型系统,系统的装置分布范围很广,远程I/O可以分散安装在现场装置附近,连线短,但需要增设驱动器和远程I/O电源;多台PLC联网的分布式适用于多台设备分别独立控制,又要相互联系的场合,可以选用小型PLC,但必须要附加通讯模块。
用户通过以下步骤可配置Smart 1000 IE与S7-200 SMART CPU的PPI通信。 步:在WinCC flexible的主工作窗口中,展开左侧树形项目结构,选择“项目”>“通讯”>“连接”,双击“连接”图标以打开“连接设置”的属性窗口。 第二步:在“连接”窗口中双击名称下方的空白表格,或者右击鼠标选择快捷菜单中的“添加连接”可以添加与CPU的连接。 第三步:添加连接后,根据项目需求用户可以修改默认的连接名称“连接_x”,并选择“通讯驱动程序”和是否在线。由于连接的设备是S7-200 SMART CPU,所以在“通讯驱动程序”下方的下拉菜单处选择“SIAMTIC S7 200 SMART”作为通讯驱动程序,同时在线连接。 第四步:设置连接参数。先选择Smart 1000 IE的接口为“IF1 B”,即触摸屏的RS422/485物理接口。选中该接口后,该接口的参数设置窗口将在其下方自动显示。设置触摸屏的通信波特率为187500,站地址为1。 接着在“网络”窗口选择“PPI”为通信双方的通信协议。 后在“PLC设备”窗口设置CPU的站地址,此处设置CPU的站地址为2 注意:CPU的地址必须不同于HMI设备的地址,二者不能重复。 第五步:设置S7-200 SMART CPU的波特率和站地址。在STEP 7 Micro/WIN SMART软件的项目树中选择“系统块”,然后按“回车”键,即可打开如所示的“系统块”窗口。为CPU的RS485端口设置的站地址和波特率必须与图6的配置保持一致,CPU的站地址为2,通信波特率为187.5 kbps。
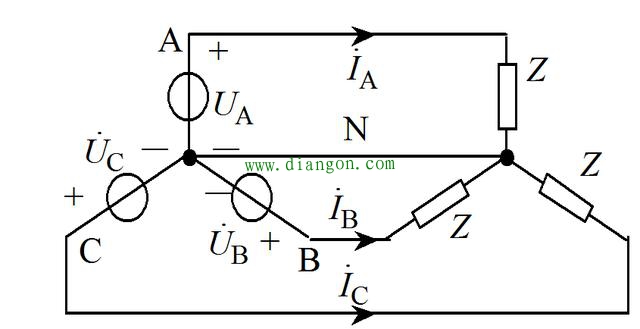
| 1.三相负载的星形(Y)连接法
|