
西门子电机6SL3120-2TE15-0AA4参数详细






西门子电机6SL3120-2TE15-0AA4参数详细
关于200与G110变频器通信问题,想请教各位高工们,请各位详细指教,现有1台200PLC和14台G110变频器,之间采用USS通信,14台变频器的控制可以多段速频率实时控制,控制频率由屏上设置,并且14台的实际运行频率需要反馈给PLC后,再屏上显示,14台电机运行方式有时同时控制,也可能错开控制,而且每个电机多需要2段速·和正反转控制,先想请教高工们:USS库的用法。1.先定义需要控制的变频器数量,波特率,同时在变频器设置相对应的通信属性,2.USS控制块的用法,本人也用1台PLC和1台G110通信过,能运行,频率也可设置,也就是单台通信能达到预期的效果,现在迷惑之处是,14台,是需要14个USS控制块调用吗?USS控制块好像是USS_CTRL,如果是,每个USS控制块占用397个字节,那么14个所需要的字节量=14*397个字节吗?并且14个USS控制块要像MODBUS库那样写轮回控制(靠前者完成位触发后者所需要的库吗),具体怎样轮回控制要怎样写?前辈们:请详细写出程序例子,本人在此谢过!!!如果14USS控制块不需要轮回触发,就直接分别同时调用它,这样可以同时分别控制电机运行吗?这样端口会通信不了,会错吗?
答:1、USS协议库指令,归根结底是一个子程序集,它包含了若干个子程序。这些子程序的运行会占用变量区。由于子程序运行时,会占用这些变量区,所以用户不能用。否则运行出错。我的学生就犯过这种错误,导致uss指令运行时始终有错误代码1。(这种错误,编译不会提示有错误的。除非你没有指定库指令的存储器区,程序编译会出错,当然也就别提程序运行了)
2、理解上面这一点,回想C语言的运行,显然,无论你驱动多少个变频器。所占用的都是那397个字节。因为他们调用的都是同一个子程序。
3、进一步讲,所谓的USS指令库,其本质就是PLC的自由口通信,只不过西门子写了一个通用程序集,简化了用户的工作。
4、针对你PLC与单台变频器通信已经成功。相关设置及编程对你而言应该不成问题。一次初始化(定义PLC的某一端口使用USS协议通信),多次调用USS_CTRL(或USS_CTRL_P1)指令就可以完成对多台变频器的驱动。关键是要理解初始化中active的含义:这是一个32位的整数,第0位为1,表示地址为“0”的变频器加入uss通信,第1位为1,表示地址为“1”的变频器加入uss通信,以此类推,1个S7-200可以对32个变频器控制。需要引起注意的是,很多人,先调试了一台,指定了库指令变量区,后来加入多台,不经意中很容易使用已经分配给通信的变量区。造成运行错误。
5、单台运行通过了,进而调试多台,可能出现检查程序正确,但就是没法运行成功的情况。这时候,请检查“总线终端电阻”开关的设置,只有首尾置“ON”,第二个,在USS 总线上的各个器件之间要求有一个公共的 0 V 基准 (端子号 10) ,既要把这个端子串联起来并与PLC的COM端相连。单台调试时,可以不连,多台总线式通信务必连接。第三,同时应该记住USS协议是串行通信协议,其物理联接方式应该是串行联接,而不能是树
任何闭环控制系统的首要任务是要稳(稳定)、快(快速)、准(准确)的响应命令。PID调整的主要工作就是如何实现这一任务。
增大比例系数P将加快系统的响应,它的作用于输出值较快,但不能很好稳定在一个理想的数值,不良的结果是虽较能有效的克服扰动的影响,但有余差出现,过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏。积分能在比例的基础上消除余差,它能对稳定后有累积误差的系统进行误差修整,减小稳态误差。微分具有超前作用,对于具有容量滞后的控制通道,引入微分参与控制,在微分项设置得当的情况下,对于提高系统的动态性能指标,有着显著效果,它可以使系统超调量减小,稳定性增加,动态误差减小。
,P—比例控制系统的响应快速性,快速作用于输出,好比"现在"(现在就起作用,快),I—积分控制系统的准确性,消除过去的累积误差,好比"过去"(清除过去积怨,回到准确轨道),D—微分控制系统的稳定性,具有超前控制作用,好比"未来"(放眼未来,未雨绸缪,稳定才能发展)。当然这个结论也不可一概而论,只是想让初学者更加快速的理解PID的作用。
在调整的时候,你所要做的任务就是在系统结构允许的情况下,在这三个参数之间权衡调整,达到**控制效果,实现稳快准的控制特点。
比例控制可快速、及时、按比例调节偏差,提高控制灵敏度,但有静差,控制精度低。积分控制能消除偏差,提高控制精度、改善稳态性能,但易引起震荡,造成超调。微分控制是一种超前控制,能调节系统速度、减小超调量、提高稳定性,但其时间常数过大会引入干扰、系统冲击大,过小则调节周期长、效果不显著。比例、积分、微分控制相互配合,合理选择PID调节器的参数,即比例系数KP、积分时间常数τi和微分时间常数τD,可迅速、准确、平稳的消除偏差,达到良好的控制效果。
1. 比例环节
成比例地反映控制系统的偏差信号e(t),偏差一旦产生,控制器立即产生控制作用,以减小偏差。当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
P参数越小比例作用越强,动态响应越快,消除误差的能力越强。但实际系统是有惯性的,控制输出变化后,实际y(t)值变化还需等待一段时间才会缓慢变化。由于实际系统是有惯性的,比例作用不宜太强,比例作用太强会引起系统振荡不稳定。P参数的大小应在以上定量计算的基础上根据系统响应情况,现场调试决定,通常将P参数由大向小调,以能达到*快响应又无超调(或无大的超调)为**参数。
优点:调整系统的开环比例系数,提高系统的稳态精度,减低系统的惰性,加快响应速度。
缺点:仅用P控制器,过大的开环比例系数不仅会使系统的超调量增大,而且会使系统稳定裕度变小,甚至不稳定。
2. 积分环节
控制器的输出与输入误差信号的积分成正比关系。主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数T,T越大,积分作用越弱,反之则越强。
为什么要引进积分作用?
比例作用的输出与误差的大小成正比,误差越大,输出越大,误差越小,输出越小,误差为零,输出为零。由于没有误差时输出为零,因此比例调节不可能完全消除误差,不可能使被控的PV值达到给定值。必须存在一个稳定的误差,以维持一个稳定的输出,才能使系统的PV值保持稳定。这就是通常所说的比例作用是有差调节,是有静差的,加强比例作用只能减少静差,不能消除静差(静差:即静态误差,也称稳态误差)。
为了消除静差必须引入积分作用,积分作用可以消除静差,以使被控的y(t)值*后与给定值一致。引进积分作用的目的也就是为了消除静差,使y(t)值达到给定值,并保持一致。
积分作用消除静差的原理是,只要有误差存在,就对误差进行积分,使输出继续增大或减小,一直到误差为零,积分停止,输出不再变化,系统的PV值保持稳定,y(t)值等于u(t)值,达到无差调节的效果。
但由于实际系统是有惯性的,输出变化后,y(t)值不会马上变化,须等待一段时间才缓慢变化,因此积分的快慢必须与实际系统的惯性相匹配,惯性大、积分作用就应该弱,积分时间I就应该大些,反之而然。如果积分作用太强,积分输出变化过快,就会引起积分过头的现象,产生积分超调和振荡。通常I参数也是由大往小调,即积分作用由小往大调,观察系统响应以能达到快速消除误差,达到给定值,又不引起振荡为准。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。PI控制器不但保持了积分控制器消除稳态误差的“记忆功能”,而且克服了单独使用积分控制消除误差时反应不灵敏的缺点。
优点:消除稳态误差。
缺点:积分控制器的加入会影响系统的稳定性,使系统的稳定裕度减小。
3. 微分环节
反映偏差信号的变化趋势,并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。
为什么要引进微分作用?
前面已经分析过,不论比例调节作用,还是积分调节作用都是建立在产生误差后才进行调节以消除误差,都是事后调节,因此这种调节对稳态来说是无差的,对动态来说肯定是有差的,因为对于负载变化或给定值变化所产生的扰动,必须等待产生误差以后,然后再来慢慢调节予以消除。
但一般的控制系统,不仅对稳定控制有要求,而且对动态指标也有要求,通常都要求负载变化或给定调整等引起扰动后,恢复到稳态的速度要快,因此光有比例和积分调节作用还不能完全满足要求,必须引入微分作用。比例作用和积分作用是事后调节(即发生误差后才进行调节),而微分作用则是事前预防控制,即一发现y(t)有变大或变小的趋势,马上就输出一个阻止其变化的控制信号,以防止出现过冲或超调等。
D越大,微分作用越强,D越小,微分作用越弱。系统调试时通常把D从小往大调,具体参数由试验决定。
如:由于给定值调整或负载扰动引起y(t)变化,比例作用和微分作用一定等到y(t)值变化后才进行调节,并且误差小时,产生的比例和积分调节作用也小,纠正误差的能力也小,误差大时,产生的比例和积分作用才增大。因为是事后调节动态指标不会很理想。而微分作用可以在产生误差之前一发现有产生误差的趋势就开始调节,是提前控制,所以及时性更好,可以*大限度地减少动态误差,使整体效果更好。但微分作用只能作为比例和积分控制的一种补充,不能起主导作用,微分作用不能太强,太强也会引起系统不稳定,产生振荡,微分作用只能在P和I调好后再由小往大调,一点一点试着加上去。
自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势。这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。PD控制只在动态过程中才起作用,对恒定稳态情况起阻断作用。因此,微分控制在任何情况下都不能单独使用。
优点:使系统的响应速度变快,超调减小,振荡减轻,对动态过程有“预测”作用。
在低频段,主要是PI控制规律起作用,提高系统型别,消除或减少稳态误差;在中高频段主要是PD规律起作用,增大截止频率和相角裕度,提高响应速度。因此,控制器可以全面地提高系统的控制性能
电机是把电能转换成机械能的机电设备。电网输入的电能经电机内部气隙磁场实现机电能量转换,由电机轴伸输出机械功率驱动各类设备运转。通俗点讲,电机内气隙是电能转换为机械能的无形媒介,轴伸则是电机与机械传动系统的有形联结。今天,就和大家聊聊电机与机械传动系统联结型式,各类联结究竟有哪些特点,为什么必须选择这种联结方式。
电机与机械传动系统联结方式理论上可以有可拆卸和不可拆卸两大类,但几乎所有应用系统中电机作为通用性独立模块存在,必须具有互换性,故而只有可拆卸联结结构型式。恰恰因可拆卸、互换性这一基本特征,电机轴伸才只有圆柱轴伸、圆锥轴伸、花键轴伸三种,实际输出联结形式分为圆柱轴伸平键联结、圆锥轴伸平键联结、圆柱轴伸切向键联结和花键联结,其中花键联结时根据负荷和精度要求设计为矩形花键轴伸和渐开线花键轴伸。
一、电机常用轴伸型式
1.圆柱轴伸平键联结
圆柱轴伸平键联结*为常见,没有特殊要求或缺省默认情况均为平键联结圆柱轴伸。这种轴伸不需要过高的加工设备和操作技能,粗糙度、尺寸精度和对中精度容易保证,可满足绝大多数应用场合结构强度、配合精度要求。
2.圆锥轴伸平键联结
圆锥轴伸平键联结多用于要求频繁正反转、耐振、耐冲击、重载起动等场合,一般轴伸锥度1:10、轴端带锁紧装置。普通机加设备和*基本的操作技能均能胜任锥轴伸加工,应用规模仅次于圆柱轴伸,共同作为标准轴伸联结输出型式。
3.圆柱轴伸切向键联结
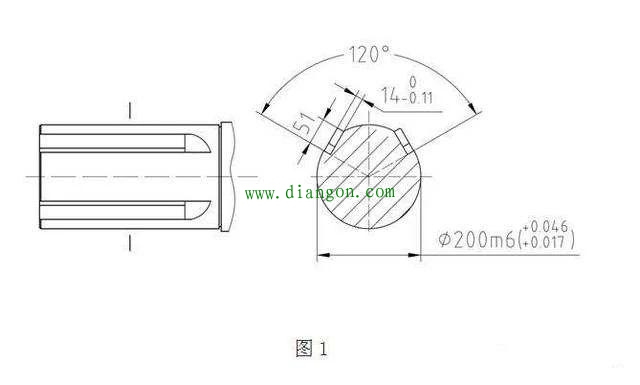
圆柱轴伸切向键联结主要用于轴径大于100mm 、对中性要求不高且载荷较大的重型机械中。切向键由两个斜度为1:100的普通楔键组成,相互平行的两窄面为工作面,一个工作面在通过轴心线的平面内,工作时工作面上的挤压力沿轴的切线作用,即靠工作面的挤压来传递转矩。一个切向键只能传递单向转矩,若要传递双向转矩,必须用两个切向键,并错开120~135反向安装,如图1所示。
4.花键轴伸
当平键强度不能满足设计要求时,则应考虑设计花键轴伸。花键联结是由多个键齿与键槽在轴和轮毂孔的周向均布而成,分为矩形花键和渐开线花键。
花键齿较多、工作面积大、承载能力较高;键均匀分布,各键齿受力较均匀;齿轴一体且齿槽浅、齿根应力集中小,强度高且对轴的强度削弱减少;轴上零件对中性好、导向性较好。所有这些平键无可比拟的优点,注定花键*适合于用作电机轴伸。但花键加工必须配备专用设备和刃具,检测计量难度大、加工成本高,只在高精度、特殊应用或普通轴强度无法满足设计要求的场合才选用。
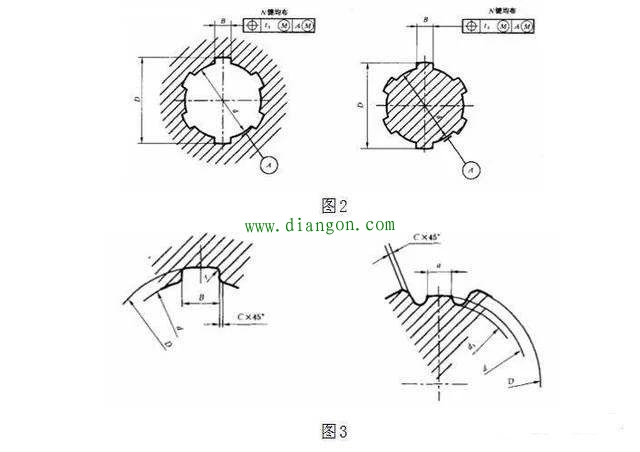
图2为矩形花键结构型式,图3为键槽截面形状。矩形花键采用小径定心方式,即外花键和内花键的小径作为配合表面。特点:1)定心精度高,定心的稳定性好;2)可以利用磨削的方法消除热处理产生的变形。矩形花键的标记代号依次包括键数N、小径d、大径D、键宽B。如花键规格6×23×26×6,表示键数6、小径φ23、大径φ26、键宽6,花键副:6×23H7/f7×26H10/a11×6H11/d10。
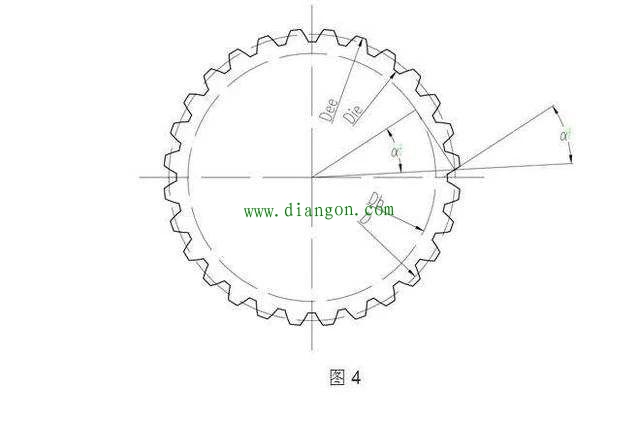
图4为渐开线花键轴截面尺寸,特点为:1)载荷较大,定心精度要求较高,齿廓为渐开线;2)受载时齿上有径向分力、能起自动定心作用;3)各齿载荷作用均匀,强度高,寿命长;4)压力角有30°、37.5°、45°,压力角愈大、载荷能力愈小、自定心能力愈强;5)模数2.5~10,*少齿数为10。
齿数24、模数2.5、30°圆齿根、公差等级为5级、配合类别H/h的渐开线花键副表示为:INT/EXT 24z ×2.5m×30R×5H/5h。
简而言之,电机轴伸与设备直接对接,尺寸加工精度要求非常高,涉及电机质量的问题也很多。
二、轴伸不合适导致的具体问题
1.轴伸直径
与设备配套采用联轴器轴向对接或采用皮带轮传动联接,无论哪种联接都会涉及轴伸与联轴器的配合。如果直径偏大或与联轴器、皮带轮等设备接口配合过紧,会导致无法安装或配合面严重损伤,*终的结果是因配套性不好导致设备运行总体效率低下;相反,如果配合过于松动,电机与设备配合会出现晃动,轴伸与联轴器之间会出现径向的相对移动,导致联接键受损并伴有严重杂音,同时,电机轴伸键槽和联轴器键都会受损,严重时导致设备无法工作。
2.轴伸长度
轴伸长度与决定电机与设备轴向对接空间的关键尺寸,如果轴伸过长且采用轴向对接方式,势必会导致设备与电机相对空间过于紧张,致使电机和设备轴向受力严重,出现轴承受力损毁的事实。该问题对于皮带轮传动的情况相对要好一些,但作为电机生产企业,要保证客户各种安装方式的要求,所以该尺寸必须严格控制。
3.轴伸根部处置
该环节是不少电机厂家遇到的问题,一是根部处置能否保证联轴器安装到位,二是根部过渡圆角的加工不合理,容易引起应力集中。有的电机厂家轴加工时该处圆角处置非常随意,有的甚至是采用扎刀方式加工,*终导致该处应力过于集中,*终的结果是电机带载运行时轴齐根断裂。值得一提的是,不仅仅轴伸根部应力集中问题断轴,轴承位根部也因一模一样的问题常出现断轴故障案例。
4.轴伸键槽宽度、深度和对称度
键槽宽度、深度负超差,导致轴与联轴器无法安装,反之,如果尺寸正超差,则会导致电机运行带载时因键的移动致使键槽受损,甚至导致电机与设备转动的不同步。对于对称度问题,如果不符合要求,将无法与联轴器联接。
轴伸是电机与设备配套的接口,接口联结方式直接决定了负荷能常大,选用时应以适宜、实用、安全可靠为原则,尽可能通过*经济稳妥的手段满足客户需求
