
锦州西门子代理商






锦州西门子代理商
电源舱是一个基本的轨道空间系统,它将增加航天飞机轨道器的供电能力,以支持空间实验室飞行,并将为那些供电能力要求高、飞行时间长和有人值守工作的航天飞机的各种载荷提供*的自由飞行供电方式。
电源舱的功用如下:(1)允许航天飞机轨道器和空间实验室维持有意义的轨道飞行时间,大大超过基本空间运输系统所能提供的7天时间,无需航天飞机及其有效载荷付出多大代价;(2)为航天飞机载有效载荷的飞行提供能源、散热能力和姿态控制,并改善其对环境的污染;(3)电源舱本身是一个高性能宇宙飞行器,它为自由飞行的有效载荷提供能源、散热能力、姿控、数据管理和间断的人工管理;(4)为未来的科学发展和空间技术应用活动提供能力基础;(5)推动技术与应用的发展,支持太阳能卫星的论证。
Pic1. 导入新的GSD文件
2. 系统的硬件组态
2.1 S7 300组态
在项目中加入Simatic 300 Station,进行相应组态插入相应的300CPU,其硬件组态见Pic2。
Pic2. 315-2DP硬件组态
双击CPU集成DP口,设置为DP Slave模式,见Pic3所示。
Pic3. 315-2DP的DP口组态
为了使300CPU能够与H系统进行通讯,应在300CPU内组态相应的与H系统的通讯区域。实际上是在300CPU的I/O区域内申请相应的通讯区域。I 区对应于从H系统接受的数据,Q区对应于向H系统发送的数据,点击Configuration页面,进行相应输入输出映象区设置,此处组态了4字节输入、4字节输出,见Pic4所示。
Pic4. 315-2DP的通讯区域设置
Pic5. 接口参数设置
注意:通讯区域的组态中设置Consistency为ALL,且地址Address应与300 CPU I/O地址区分开,避免两者的重叠。
2.2 冗余系统组态
H系统中插入IM157时,请选择“Interface module for PROFIBUS-DP"选项,如下图Pic6所示。
Pic6. IM157 总线系统选择
如下图Pic7所示,加入S7 300从站站点。
Pic7. 加入CPU315-2DP从站
类似于为普通的ET200M从站组态插槽,为相应的S7-300站点组态接口数据,将如下图Pic8中的模块拖拽到相应的S7 300站点的插槽中,注意,需要从第4槽开始,且需要和S7 300硬件组态中的通讯接口的配置相对应。见上图Pic4中,S7-300配置了4字节输入、4字节输出,则此处要配置4字节输出、4字节输入。终配置如下图Pic9所示。
Pic8. 作为DP-Slave 的315-2DP中可插入的模块
注:该接口的设置必须和S7 300中的接口设置相对应,S7 300处选择consistency为ALL,此处则需要选择tot. lgth.的模块,不能选择unit的模块。
Pic9. H系统中315-2DP中的模块
终组态如下图Pic10所示。
Pic10. 硬件组态
3. S7-300和冗余系统下的编程
实际进行通讯时,只要把H系统的I/Q区与315-2DP的Q/I区对应即可。本例中的通讯地址对应关系见下表。
| H系统 | CPU 315-2DP |
| Q 6…9 | I 2…5 |
| I 528…531 | Q 2…5 |
Table1.通讯区域对应表
无需为S7 300和冗余系统编制任何通讯程序,通讯数据通过上面配置的输入/输出接口区进行自动的读写。各控制器内如果需要读取这些数据,只需要通过上表中的相应地址直接读取即可。
西门子6FC5247-0AA06-0AA0
SINUMERIK 550系统
在1973-1981,西门子推出在SINUMERIK 550系统。这一代系统开始应用微型计算机和微处理器。在此系统中,PLC(可编程逻辑控制器)集成到控制器。
 SINUMERIK 3系统
SINUMERIK 3系统
在1982-1983,西门子推出SINUMERIK 3系统
 SINUMERIK 840C系统
SINUMERIK 840C系统
在1984-1994,西门子推出SINUMERIK 840C系统。西门子从此时起开始开放NC数控自定义功能,公布PC和HMI开放式 软件包 。此时的西门子敏锐地掌握了 数控机床 业界的显著趋势:开放性。基于系统的开放性,西门子显著地扩大了其OEM机床制造商定制他们的设备的可能性。
 SINUMERIK 840D系统
SINUMERIK 840D系统
 SINUMERIK 810D系统
SINUMERIK 810D系统
SINUMERIK810D/840D系统的PLC部分使用的是西门子SIMATIC S7-300的软件及模块,在同一条导轨上从左到右依次为电源模块(Power Supply),CPU模块,接口模块(Interface Module)及信号模块(Signal Module)。PLC模块的CPU与NC的CPU是集成在CCU或NCU中的。
电源模块(PS)是为PLC和NC提供电源的+24V和+5V。
接口模块(IM)是用于级之间互连的。
信号模块(SM)使用与机床PLC输入/输出的模块,有输入型和输出型两种
1、驱动电源:MASTERDRIVE MC/SIMODRIVE 610/650/660/611/611-A/611-D/611-U/等。
2、伺服电源:6SN1145、6SN1146全系列型号(10KW~156KW)各类报警、输出电压过低、过压、炸机等故障。
3、伺服驱动单元(驱动板):6SN118全系列型号。
4、伺服驱动器:伺服驱动器6SN1123全系列型号(10KW~120KW)。
5、伺服电机:1PH系列、 1FT系列、1FK系列(轴承SKF、绕组、法兰、端盖、编码器、抱闸等故障均可维修),我公司维修伺服电机加 急三个工作日即可修复,绕组浸漆及烘干需要两天,轻重负载测试需。
6、手持控制单元(手轮):6FX2007全系列型号。(虚显、无执行反应、元点车、无显示、电源加不上、通信故障等)
7、老系统主轴伺服驱动:6SC660系列、6SC650系列、6SC620系列、6SC610系列、6SC6110系列、6SC6111系列、6SC6112系列、 6SC6100系列、6SCY120系列、6SC6130系列、6SC6140系列、6SC6170等全系列型号均可维修测试。
伺服驱动电源模块
伺服系统:是使物体的位置、方位、状态等输出,能够跟随输入量(或给定值)的任意变化而变化的自动控制系统。
(2)在自动控制系统中,能够以一定的准确度响应控制信号的系统称为随动系统,亦称伺服系统。
伺服的主要任务是按控制命令的要求,对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制得非常灵活方便。
1.3 伺服系统的组成
伺服系统可分为开环、半闭环、闭环控制系统6SN1118-0DH12-0AA0具有反馈的闭环自动控制系统由位置检测部分、偏差放大部分、执行部分及被控对象组成。
1.4 伺服系统的性能要求
伺服系统必须具备可控性好,稳定性高和适应性强等基本性能。说明一下,可控性好是指讯号消失以后,能立即自行停转;稳定性高是指转矩随转速的增加而均匀下降;适应性强是指反应快、灵敏、响态品质好。
1.5 伺服系统的种类通常根据伺服驱动机的种类来分类,有电气式、油压式或电气—油压式三种。
伺服系统若按功能来分,则有计量伺服和功率伺服系统;模拟伺服和功率伺服系统;位置伺服和加速度伺服系统等。电气式伺服系统根据电气信号可分为DC直流伺服系统和AC交流伺服系统二大类。
AC交流伺服系统又有异步电机伺服系统和同步电机伺服系统两种售后服务,售后保质期,保证,让您满意。
伺服进给系统的用途:
(1)伺服系统:是使物体的位置、方位、状态等输出,能够跟随输入量(或给定值)的任意变化而变化的自动控制系统。
(2)在自动控制系统中,能够以一定的准确度响应控制信号的系统称为随动系统,亦称伺服系统。伺服的主要任务是按控制命令的要求,对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制得非常灵活方便。
1.3 伺服系统的组成伺服系统可分为开环、半闭环、闭环控制系统6SN1118-0DH12-0AA0具有反馈的闭环自动控制系统由位置检测部分、偏差放大部分、执行部分及被控对象组成。
1.4 伺服系统的性能要求伺服系统必须具备可控性好,稳定性高和适应性强等基本性能。说明一下,可控性好是指讯号消失以后,能立即自行停转;稳定性高是指转矩随转速的增加而均匀下降;适应性强是指反应快、灵敏、响态品质好。
1.5 伺服系统的种类通常根据伺服驱动机的种类来分类,有电气式、油压式或电气—油压式三种。伺服系统若按功能来分,则有计量伺服和功率伺服系统;模拟伺服和功率伺服系统;位置伺服和加速度伺服系统等。电气式伺服系统根据电气信号可分为DC直流伺服系统和AC交流伺服系统二大类。AC交流伺服系统又有异步电机伺服系统和同步电机伺服系统两种售后服务,售后保质期,保证,让您满意。

伺服驱动系统(Servo System)简称伺服系统,是一种以机械位置或角度作为控制对象的自动控制系统,例如数控车床等。使用在伺服系统中的驱动电机要求具有响应速度快、定位准确、转动惯量(使用在电机系统中的伺服电机转动惯量较大,为了能够和丝杠等机械部件直接相连。伺服电机有一种专门的小惯量电机,为了得到*的响应速度。但这类电机的过载能力低,当使用在进给伺服系统中时,必须加减速装置。转动惯量反映了系统的加速度特性,在选择伺服电机时,系统的转动惯量不能大于电机转数惯量的3倍)较大等特点,这类专用的电机称为伺服电机。当然,其基本工作原理和普通的交直流电动机没有什么不同。该类电机的专用驱动单元称为伺服驱动单元,有时简称为伺服,一般其内部包括电流、速度/或位置闭环
我们是否遇到过这样的问题:将DB块下载到CPU,此DB块数据初始化,或者wincc对应的输入值被清零,我们新手如何避免这样的问题?
下面我们看一下DB块的界面:

这是DB块的声明模式,也是我们创建DB块的界面。
我们要说的是他的数据视图(视图->数据视图)
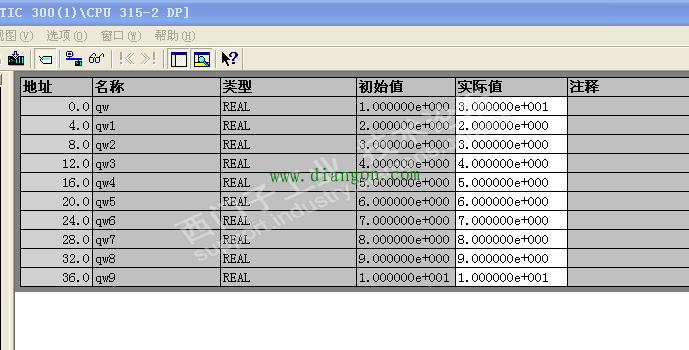
这里面多了一个实际值,要说的就是他。
我个人感觉把他称呼为实际值不是太准确,也容易与CPU运行中实际值混淆,叫离线实际值更确切一点。其实我们每次下载DB块时,都是将这里面的数值下载到CPU,而非初始值。
离线实际值在我们次点数据视图切换时生成(如果未切换过,则是下载时生成),生成后,即使再更改初始值,也不会变化,只能手动更改。但是注意一点如果DB块的个是INT格式,则它的值是0(估计程序默认的,毕竟初始化也不是太重要)。如果大家下载DB块时想要按初始值开始,个人建议好执行一次初始化数据块(数据视图模式:编辑->初始化数据块)。
回到我们的问题:如果更改数据块后下载,不想更改原先的数据,可以这样操作:在SIMATIC Manager主页面点击在线,将此数据块上载替换原数据块(此时可以看一下这个数据块的离线实际值,和在线实际值一致),然后在这个数据块中更改,再下载,就可以做到不丢失原数据了。
