周口西门子模块代理商






周口西门子模块代理商
装载存储器
可以防止装载存储器(存储卡)执行操作。要防止从内部装载存储器到外部装载存储器的操作,请按照以下步骤操作:
1. 在 STEP 7 中,从 CPU 设备组态的“常规”(General) 属性中选择“保护”(Protection)。
2. 在“外部装载存储器”(External Load Memory)
部分,选择“禁用从内部装载存储器到外部装载存储器的操作”(Disable copy from internal load memory to external load memory)。
有关该属性对 CPU 存储卡的影响,另请参见在 CPU 中存储卡 (页 152)主题。
7.6.2 专有技术保护
专有技术保护可防止程序中的一个或多个代码块(OB、FB、FC 或
DB)受到未经的访问。 用户创建以对代码块的访问。
保护会防止对代码块进行未的读取或修改。如果没有,只能读取有关代码块的以下信息:
● 块标题、块注释和块属性
● 传送参数(IN、OUT、IN_OUT、Return)
● 程序的调用结构
● 交叉引用中的全局变量(不带使用时的信息),但局部变量已隐藏
将块组态为“专有技术”保护时,只有在输入后才能访问块内的代码。 使用代码块的“属性”(Properties) 任务卡组态该块的专有技术保护。
打开代码块后,从“属性”(Properties) 中选择“保护”(Protection)。
1. 在代码块的“属性”(Properties) 中,单击“保护”(Protection)
按钮显示“专有技术保护”(Know-how
protection) 对话框。
2. 单击“定义”(Define) 按钮输入。输入并确认后,单击“确定”(OK)。
7.6.3 保护
附加特性允许程序块,以用于特定存储卡或
CPU。该特性对于保护您的知识产权特别有用。当您将程序块与特定设备在一起时, 就会将程序或代码块为仅用于特定存储卡或
CPU。此特性允许用户通过电子(例如通过 Internet
或电子邮件)或发送存储卡的分配程序或代码块。保护可用于 OB (页 204)、FB
(页 206) 和 FC (页 205)。S7-1200 CPU 支持三种类型的块保护:
● 与 CPU 的序列号进行绑定
● 与存储卡的序列号进行绑定
● 与强制性动态绑定
使用代码块的“属性”(Properties) 任务卡将块到特定 CPU 或存储卡。
1. 打开代码块之后选择“保护”(Protection)。
2. 在“保护”(Copy protection) 任务下的下拉列表中,选择要使用的保护的类型。
3. 对于与 CPU 或存储卡序列号的绑定,可以在下载时序列号,也可以输入存储卡或
CPU 的序列号。
说明
序列号区分大小写。
对于与强制性的动态绑定,定义下载或块所必须使用的。
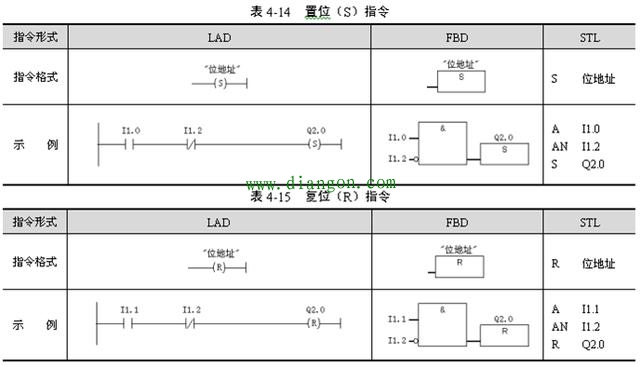
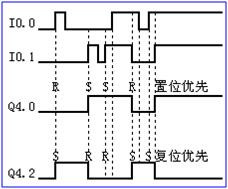
| RS触发器为“置位优先”型触发器(当R和S驱动信号同时为“1”时,触发器终为置位状态);SR触发器为“复位优先”型触发器(当R和S驱动信号同时为“1”时,触发器终为复位状态)。RS触发器和SR触发器的“位地址”、置位(S)、复(S)及输出(Q)所使用的操作数可以是:I、Q、M、L、D。
|



| 置位(S)和复位(R)指令根据RLO的值来决定操作数的信号状态是否改变,对于置位指令,一旦RLO为“1”,则操作数的状态置“1”,即使RLO又变为“0”,输出仍保持为“1”;若RLO为“0”,则操作数的信号状态保持不变。对于复位操作,一旦RLO为“1”,则操作数的状态置“0”,即使RLO又变为“0”,输出仍保持为“0”;若RLO为“0”,则操作数的信号状态保持不变。这一特性又被称为静态的置位和复位,相应地,赋值指令被称为动态赋值。 PS:解释一下RLO,在西门子S7系列plc中,RLO= “逻辑运算结果”,在二进制逻辑运算中用作暂时存储位。RLO即result of logic operation 状态字的位称为逻辑运算结果,该位用来存储执行位逻辑指令或比较指令的结果,RLO的状态为“1”,表示有能流流到梯形图中的运算点处,为“0”则表示无能流流到该点处。
|