

西门子6ES7214-1BD23-0XB8大量库存
交流伺服控制器具有以下特点:
1、全数字化
交流伺服控制器是全数字化技术,其速度控制范围为0hz~500hz,控制精度标准为~0.02hz(特殊要求时可做到0.0025hz)。该控制器可以满足数控铣镗床进行大范围的稳定、准确的高精度速度控制的需求。
2、高可靠的调速和过载性能
与相比较,其速度曲线呈线性(速度曲线如图1),使得加工过程时机床在频繁地起、停、正转、反转和制动控制的工况条件下连续正常地运行而速度不产生波动。而且,该系统具有优良的超载特性,在铭牌额定转速下可以做到300%的额定转矩输出,完全有别于一般变频器的工作曲线(见图2),保证了重载加工过程中在负载大范围波动的情况下机床依然可以平稳运行。

图1 时光伺服控制器速度曲线
3、转速和转矩的解耦独立控制
交流伺服控制器可以实现三相异步电机任意转速与转速的“解耦控制”。从而保证了负载力矩变化时速度恒定。同样,时光伺服控制器可以保持在稳速运行情况下(低速0.3r/min下大扭矩输出、无波动爬行)实时地改变输出转矩以满足加工复杂曲面的大型工件的要求。

图2 一般通用“变频器”与“伺服控制器”的主要性能区别
4、三相交流异步电机的选型
目前国内三相交流异步电机生产技术十分成熟,可靠性高,容量可达数百kw以上;低速回转平稳、转矩大(无弱磁问题);
用户可根据需要选用专门设计的;也可以使用通用型三相异步电机,只需在电机后轴部加装编码器即可,而无需做其它的硬件改动。因此进行老机型改造和新机型设计都十分方便。
以下为编码器接线图介绍,与连接,以欧姆龙cpm1a为例:
1.npn集电极开路输出
接线方式如下图所示:
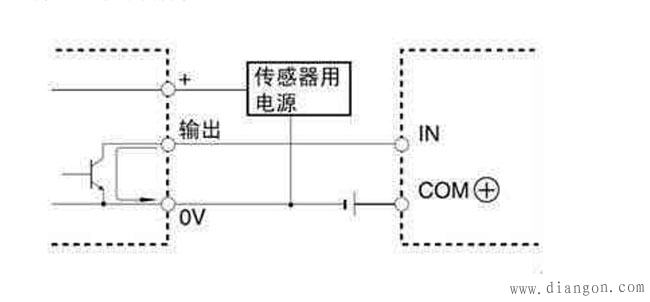
此接线方式应用于当的工作电压与plc的输入电压不同时,取编码器晶体管部分,另外串入,以无电压形式接入plc。但是需要注意的是,外接电源的电压必须在dc30v以下,开关容量每相35ma以下,超过这个工作电压,则编码器内部可能会发生损坏。
接线方式描述:编码器的褐线接编码器工作电压正极,蓝线接编码器工作电压负极,输出线依次接入plc的输入点,蓝线接外接电源负极,外接电源正极接入plc的输入com端。
2.电压输出
接线方式如下图所示:
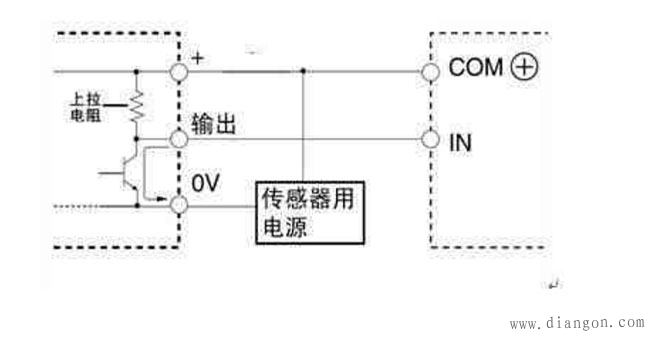
接线方式描述:编码器的褐线接电源正极,输出线依次接入plc的输入点,蓝线接电源负极,再从电源正极端拉根线接入plc输入com端。
3.pnp集电极开路输出
接线方式如下图所示:

接线方式描述:编码器的褐线接工作电压正极,蓝线接工作电压负极,输出线依次接入plc的输入com端,再从电源负极端拉根线接入plc的输入com端。
4.线性驱动输出
接线方式描述:输出线依次接入后续设备相应的输入点,褐线接工作电压的正极,蓝线接工作电压的负极。
以下为旋转编码器接线图介绍,与计数器连接,以h7cx(omron制)为例
h7cx输入信号分为无电压输入和电压输入。
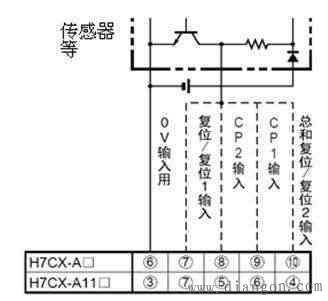
1.无电压输入
以无电压方式输入时,只接受npn输出信号。
(1)npn集电极开路输出的编码器接线方式如下图所示:

接线方式描述:褐线接电源正极,蓝线接电源负极,再从电源负极端拉根线接6号端子,黑线和白线接入8和9号端子,如果需要自动复位,则橙线接入7号端子。
(2)npn电压输出的编码器接线方式如下图所示:
接线方式与npn集电极开路输出方式一样。
2.电压输入
(1)npn集电极开路输出的编码器接线方式如下图所示:

(2)pnp集电极开路输出的编码器接线方式如下图所示:


图1杯形转子伺服的结构图
控制电动机的类型很多,这里只介绍常用的伺服电动机和步进电动机两种。
一、伺服电动机
伺服电动机的控制任务是将电压信号转换为转矩和转速以驱动控制对象。
1、交流伺服电动机
交流伺服电动机就是两相。它的定子上装有两个绕组:励磁绕组和控制绕组。它们在空间相隔90o,如图1所示。
为了减小转动惯量,转子通常用铝合金或铜合金制成的空心薄壁圆筒,称为杯形转子。此外,转子也可制成笼型。
图2是交流伺服电动机的接线图。励磁绕组1与c串联后接到交流上,其电压为 。控制绕组2常接在放大器的输出端,控制电压
。控制绕组2常接在放大器的输出端,控制电压 即为放大器的输出电压。
即为放大器的输出电压。
 |
| 图2 交流伺服电动机的接线图 |
选择适当的电容值,可使两个绕组中的电流 和
和 的相位差近于90o。这样,就产生两相旋转磁场,和电容分相式单相异步电动机一样,转子便转动起来。
的相位差近于90o。这样,就产生两相旋转磁场,和电容分相式单相异步电动机一样,转子便转动起来。
当电源电压 为一常数而信号控制电压
为一常数而信号控制电压 的大小和相位改变时,就可控制电动机的转速和转向。当控制电压变为零时,电动机立即停转。
的大小和相位改变时,就可控制电动机的转速和转向。当控制电压变为零时,电动机立即停转。
交流伺服电动机的输出功率一般是0.1~100w,其电源频率有50hz和400hz等多种。
图3所示是交流伺服电动机在热电偶温度计的自动平衡电位计电路中应用的一例。在测量温度时,将开关合在b点,利用电位计电阻 段上的电压降来平衡热电偶的电动势。当两者不相等时,就产生不平衡电压(即差值电压)
段上的电压降来平衡热电偶的电动势。当两者不相等时,就产生不平衡电压(即差值电压) 。不平衡电压经变流器变换为交流电压,而后经电子放大器放大。放大器的输出端接交流伺服电动机的控制绕组。于是电动机便转动起来,从而带动电位计电阻的滑动触点。滑动触点的移动方向,正好是使电路平衡的方向。一旦达到平衡(
。不平衡电压经变流器变换为交流电压,而后经电子放大器放大。放大器的输出端接交流伺服电动机的控制绕组。于是电动机便转动起来,从而带动电位计电阻的滑动触点。滑动触点的移动方向,正好是使电路平衡的方向。一旦达到平衡( ),电动机便停止转动。这时电阻
),电动机便停止转动。这时电阻 上的电压降
上的电压降 恰好与热电动势
恰好与热电动势 相等。如果将
相等。如果将 保持为标准值,那么,电阻
保持为标准值,那么,电阻 的大小就可反映出热电动势或直接反映出被测温度的大小来。当被测温度高低发生变化时,
的大小就可反映出热电动势或直接反映出被测温度的大小来。当被测温度高低发生变化时, 的极性不同,也就是控制电压的相位不同,从而使伺服电动机正转或反转再达到平衡。
的极性不同,也就是控制电压的相位不同,从而使伺服电动机正转或反转再达到平衡。
 |
| 图3自动平衡电位计电路的原理图 |
为了使电流 保持为恒定的标准值,在测量前或校验时,可将开关合在a点,将标准电池(其电动势为
保持为恒定的标准值,在测量前或校验时,可将开关合在a点,将标准电池(其电动势为 )接入。而后调节
)接入。而后调节 ,使
,使 ,即使
,即使 。这时的电流
。这时的电流 即等于标准值。可变电阻器
即等于标准值。可变电阻器 的滑动触点也常用伺服电动机来带动,以自动满足
的滑动触点也常用伺服电动机来带动,以自动满足 的要求。
的要求。
2、直流伺服电动机
直流伺服电动机的结构和一般他励直流电动机一样,只是为了减小转动惯量而做得细长一些。通常采用电枢控制,就是励磁电压 一定,建立的磁通φ也是定值,而将控制电压
一定,建立的磁通φ也是定值,而将控制电压 加在电枢上,其接线图如图4所示。由于信号电压较小,故需放大。
加在电枢上,其接线图如图4所示。由于信号电压较小,故需放大。
 |
| 图4直流伺服电动机的接线图 |
由式(4.11.4)可知,在一定负载转矩下,当磁通不变时,如果升高电枢电压,电动机的转速就升高;反之,降低电枢电压,转速就下降;当 时,电动机立即停转。要电动机反转,可改变电枢电压的极性。
时,电动机立即停转。要电动机反转,可改变电枢电压的极性。
直流伺服电动机通常应用于功率稍大的系统中,其输出功率一般为1~600w。
现以随动系统为例来说明直流伺服电动机的应用。
图5是采用电位器的位置随动系统的示意图。θ和 为电位器
为电位器 和
和 的轴的角位移(旋转角度),它们分别正比于电压
的轴的角位移(旋转角度),它们分别正比于电压 和
和 。
。 是控制指令,
是控制指令, 是被调量,被控机械与
是被调量,被控机械与 的轴联接。差值电压
的轴联接。差值电压 经放大后去控制伺服电动机,电动机经过传动机抅带动被控机械,使
经放大后去控制伺服电动机,电动机经过传动机抅带动被控机械,使 跟随θ而变化。
跟随θ而变化。
 |
| 图5位置随动系统的示意图 二、 |
