西门子电源6SL3130-6AE15-0AB1详细说明
均在Step7Template.mwp中编写,CPU类型选西门子S7—200系列226CN。
先说程序,测低速(每分钟1000转以下):LDI0.0
LDM20.1
CTUC0,+5000//设定增计数器上限
L***0.0
AM20.0
TONT37,+30//立即接通,延时三秒断开
L***0.0
OM20.0#p#分页标题#e#
ANT37
=M20.0//设定T37定时器复位信号
LDM20.0
LDM20.1
CTUC1,+20//设定增计数器C1上限
LDC1
MOVWC0,VW200
=M20.2
LDM20.2=M20.1//设定增计数器C1的复位信号
外围电路下面介绍,先讲程序。由I0.0作输入口,T37延时三秒后给C1一个信号,C1计1,然后T37被复位,再延时,3秒后C1计2,…
直到C1计到20。20个三秒就是一分钟,期间I0.0口的脉冲信号由C0计数器计数,计满一分钟就把结果移到VW200中。脉冲信号由外围电路得到。
以上程序能测一千以下的转速,实验时上限是一千四百多吧。由于该程序用的是低速计数器,转速较高时,受PLC时钟周期影响,在一分钟时转速还未记好,C0就被清零,所以会有上限。接下来我们用PLC内部不受时钟周期影响的高速计数器来测高速(一千转以上):
L***0.1
CALLSBR_0//调用高速计数器初始化子程序
L***0.0
AM20.0
TONT37,+100//设定计时器值,延时10秒
L***0.0
OM20.0ANT37
=M20.0//立即接通延时十秒断开
LDT37
MOVDHC0,VD100//I0.0为高速计数器HC0输入口,计数结果移入VD100
MOVDVD100,VD200
MUL+6,VD200//计数结果乘以6,放入VD200
LDT37
CALLSBR_0//T37计时到,调用高速计数器初始化子程序
SBR_0//高速计数器初始化子程序#p#分页标题#e#
L***0.0
MOVB16#F8,SMB37//设置控制位:增计数;已使能;
MOVD+0,SMD38//装载CV
MOVD+0,SMD42//装载PV
HDEF0,0
HSC0
以上程序测速范围为1000转以上,实验时测得zui高为2500+,因实验条件有限,上限未知。有人会有疑问:你怎么采用的是测10秒,然后将计数结果乘以6当做一分钟的转速,而不直接测一分钟的转速呢?因为转速结果zui后要用数码管显示出来,对观察者来说,10秒以后显示与一分钟后显示相比,前者更好一些。zui后我们采用的是6乘以10的策略。
zui后来说说外围电路吧。外围电路把转速转换成脉冲信号输入PLC,上面两段程序用的都是I0.0口。信号的转换和采集用霍尔传感器,

接法如图:VCC接24V,GND接电源负极,A接信号输入端I0.0,A端和24V间接电阻。接好后将霍尔元件平的一面朝被测物体固定好,如一个轮子,在轮子面上霍尔对应位置安装霍尔磁体。测速原理:轮子每转一圈,磁体和霍尔元件接触一次(其实是接近),它们接触时带来A端电压的降低,由此给PLC一个脉冲信号。磁体和霍尔之间间距3至5mm。安装时注意磁体的正反面。
好了,测转速就先说这么多。经过以上这些,测得的数据只是放在PLC的内存里,我们可以在软件里监测PLC运行情况,看到这些数据。是不是有点麻烦,有没有更好的方法能看到这些数据?当然,可以用LED数码管来把数据显示出来
3.在TIA 博途中添加库文件,并将库中的Easy_SINA_Pos功能块拖拽到左侧"程序块"中

4.在OB1中调用Easy_SINA_Pos功能块,为功能块各参数添加变量:

注意:对功能块参数HWI DSTW及HWI DSZW的赋值可以通过点击参数,在下拉菜单中选择对应的西门子报文111选项。
也可以参看下图,在设备视图的报文属性中查询硬件标识符的数值:

5. FB38002功能块输入输出参数说明
| ModePos | INT | 运行模式: 1 = 相对定位 2 = 定位 4 = 主动回零 7 = 按速度点动 |
| EnableAxis | BOOL | 伺服运行命令: 0 = 停止(OFF1) 1 = 启动 |
| Jog1 | BOOL | 点动信号1 |
| Jog2 | BOOL | 点动信号2 |
| MDIPosition | DINT | MDI运行模式下的位置设定值[LU] |
| MDIVelocity | DINT | MDI运行模式时的速度设定值[1000LU/min] |
| ExecuteMode | BOOL | 激活请求的模式 |
| RefCamInput | BOOL | 回零开关信号 |
| RefDirection | BOOL | 选择回零开始的方向: 0 = 正向寻零 1 = 反方向寻零 |
| AckError | BOOL | 故障复位 |
| HWLimitEnable | BOOL | 激活硬件限位开关: 1 = 激活 |
| SWLimitEnable | BOOL | 激活软件限位开关: 1 = 激活 |
| HWIDSTW | HW_IO | 符号名或SIMATIC S7-1x00设定值槽的HW ID |
| HWIDSTW | HW_IO | 符号名或SIMATIC S7-1x00设定值槽的HW ID |
S7-1500PLC的常用模块,S7-1500PLC是模块化结构设计的PLC,各个单独模块之间可以进行广泛组合和扩展,它的主要组成部分有电源模块(PM/PS)、*处理器模块(CPU)、导轨(RACK)、信号模块(SM)、通信模块(CP/CM)和工艺模块(TM)等。
(1)、电源模块(PM/PS)
用于向CPU以及其扩展模块提供+24V DC电源。
PM:无背板总线、不占用槽位,无固件版本(类似PS307)PS:有背板总线,占用槽位,有固件版本(类似PS407)
(2)、*处理器模块(CPU)
主要包括以下几种
标准CPU(比如:CPU1511-1PN)紧凑型CPU(比如:CPU1512C-1PN)分布式模块CPU(比如:CPU1510SP-1PN工艺型CPU(比如:CPU1511T-1PN)故障安全CPU模块(比如:CPU1511F-1PN)通过标红的字母可以区分是什么类型的CPU
(3)、导轨(RACK)
是安装S7-1500各类模块的机架,是特制的异形板,标准长度为160/245...2000,可以根据实际选用。S7-300/1200/1500的导轨上无背板总线。但S7-400有背板总线,*。
(4)、存储卡(SD)
用于存储PLC程序,可由PC直接读取,不支持热插拔。50万次读取寿命,大32GB
注:S7-300的MMC,PC不能直接读取需用准用读卡器设备。
(5)、信号模块(SM)
是数字量I/O模块和模拟量I/O模块的总称。信号模块主要有SM521(数字量输入)、SM522(数字量输出)、混合模块SM523、SM531(模拟量输入)、SM532(模拟量输出)和混合模块SM534。
基本型:BA标准型:ST高性能:HF(6)、工艺模块(TM)
主要用于对实时性和存储量要求高的控制任务。
计数模块(高速输入):TM Count2位置检测模块(高速输入):TM Poslnput2PTO模块(高速输出):TM PTO(7)、通信模块(CP/CM)
用于PLC之间、PLC与计算机和其他智能设备之间的通信,可将PLC接入以太网、PROFIBUS和AS-I网络,或用于串行通信。它可以减轻CPU处理通信的负担,并减少对通信功能的编程工作。
主要有两大类:
PRIFIBUS:CM 1542-5、CP1542-5PROFINET:CM 1542-1、CP1543-1(8)ET-200分布式外围设备模块
是西门子基于PRIFIBUS或PROFINET的分布式控制模块,应用很广。
1、ET200SP:是一种多功能的按位模块化的分布式I/O系统,体积比较小,要安装在控制柜里。
2、ET200MP:是一种多通道的分布式I/O系统,可以使用S7-1500的模块,要安装在控制柜内,使用广泛。
西门子6ES7522-1BL10-0AA0
变频器与软启动器的区别和联系变频器和软启动器其实是俩种*不同用途的产品。变频器主要用在电机调速的地方,变频器拥有软启动器以及其他启动器的性能的同时,在启动特性上较其他的启动器装置也有很大的优势。西门子PLC维修方法有哪些。由于这些控制和监视的要求,使PLC发展成了取代继电器线路和进行顺序控制为主的产品。PLC厂家在原来CPU模板上逐渐增加了各种通讯接口,现场总线技术及以太网技术也同步发展,使PLC的应用范围越来越广泛。

西门子在制造工业中存在大量的开关量为主的开环的顺序控制,它按照逻辑条件进行顺序动作号按照时序动作;另外还有与顺序、时序无关的按照逻辑关系进行连锁保护动作的控制;以及大量的开关量、脉冲量、计时、计数器、模拟量的越限报警等状态量为主的-离散量的数据采集监视
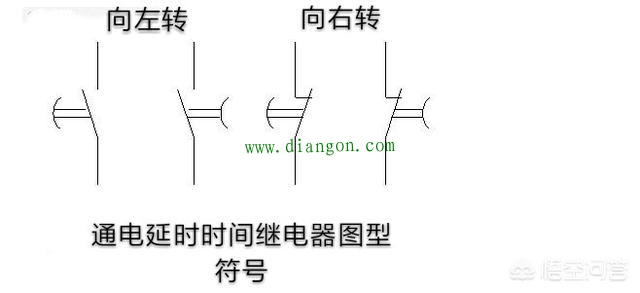
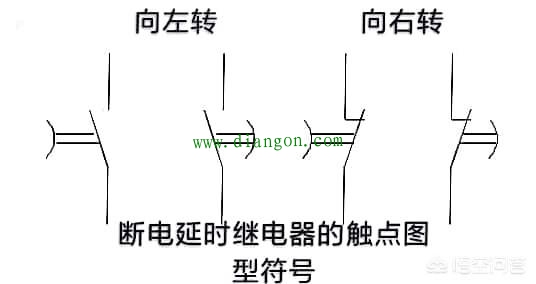
| 断电延时时间继电器的触点,是在继电器通电工作后触点动作,继电器断电后,延时时间到达预置设定的时间触点恢复原始状态。 通电延时时间继电器的触点,在继电器通电工作后,延时时间到达设定的时间触点动作。继电器断电后触点恢复原始状态。
|