

PLC主要有整体式和模块式两种结构型式。
整体式PLC的每一个I/O点的平均价格比模块式的便宜,且体积相对较小,一般用于系统工艺过程较为固定的小型控制系统中;而模块式PLC的功能扩展灵活方便,在I/O点数、输入点数与输出点数的比例、I/O模块的种类等方面选择余地大,且维修方便,一般于较复杂的控制系统。
通过IM360/361扩展,可扩展3个机架,机架(CR)到扩展机架(ER)及
在工控领域,公司以精益求精的经营理念,从产品、方案到服务,致力于塑造一个“****”品牌,以实现可的发展。
多年以来,公司坚持“以客户为本,与客户共同发展”的思想,全力以赴为工矿用户、设计单位、工程公司提供高性价比、高性、高可靠性的整体解决方案。

PLC的控制方式属于存储程序控制,其控制功能是通过存放在存储器内的程序来实现的,若要对控制功能作必要修改,只需改变控制程序即可,这就实现了控制的软件化。可编程控制器的优点在于"可"字,从软件来讲,其控制程序可编辑、可修改;从硬件上讲,其外部设备配置可变。构建一个PLC控制系统的重心就在于控制程序的编制,但外部设备的选用也将对程序的编制产生影响。因此在进行程序设计时应结合实际需要,硬、软件综合考虑。本文就硬、软两方面,选取梯形图为编程语言,以松下电工FPO-C32型PLC为例,对PLC使用过程中易出现的几个问题及解决方法进行了分析。
一、外部输入设备的选用与PLC输入继电器的使用
1. 外部输入信号的采集
PLC的外部设备主要是指控制系统中的输入输出设备,其中输人设备是对系统发出各种控制信号的主令电器,在编写控制程序时必须注意外部输入设备使用的是常开还是常闭触点,并以此为基础进行程序编制。否则易出现控制错误。
在PLC内部存储器中有于输入状态存储的输入继电器区,各输入设备(开关、按钮、行程开关或传感器信号)的状态经由输入接口电路存储在该区域内,每个输入继电器可存储一个输入设备状态。PLC中使用的"继电器"并非实体继电器,而是"软继电器",可提供无数个常开、常闭触点用于编程。每个"软继电器"仅对应PLC存储单元中的一位(bit),该位状态为"1",表示该"软继电器线圈"通电,则程序中所有该继电器的触点都动作。输入继电器作为PLC接收外部主令信号的器件,通过接线与外部输入设备相联系,其"线圈"状态只能由外部输入信号驱动。输入信号的采集工作示意图如图1。
输入继电器线圈其状态取决于外部设备状态
PLC输入信号采集示意图
图1中,输入设备选用的是按钮SB0的常闭触点,输入继电器X0的线圈状态取决于SB0的状态。该按钮未按下时,输入继电器X0线圈状态为"1"通电状态,程序中所有X0触点均动作,即常开触点接通,常闭触点断开;若按下该按钮,则输入继电器X0线圈状态为"0"断电状态,程序中所有X0触点均恢复常态。如果输入继电器连接的输入设备是按钮SB0的常开触点,则情况恰好相反:在该按钮未按下时,输入继电器X0线圈状态为"0"断电状态,程序中所有X0触点均不动作;若按下该按钮,输入继电器X0线圈状态为"1"通电状态,程序中所有X0触点均动作。
2. 停车按钮使用常闭型
由于PLC在运行程序判别触点通断状态时,只取决于其内存中输入继电器线圈的状态,并不直接识别外部设备,因此编程时,外部设备的选用与程序中的触点类型密切相关。这是一个在对照电气控制原理图进行PLC编程时易出现的问题。典型的例子是基本控制--"起保停控制"中的停车控制。
图2 "起保停控制"电气原理图
图2为"起保停控制"电气原理图,在该系统中,按钮SB0用于停车控制,因此使用其常闭触点串联于控制线路。SBl为起动按钮,使用其常开触点。若使用相同的设备(即停车SB0用常闭触点,起动SBl用常开触点),利用PLC进行该控制,则需编程梯形图程序(图3):
图3 "起保停控制"梯形图程序(停车按钮使用常闭触点)
I/O分配:SB0--X0,SBl--Xl,输出Y0
该梯形图中停车信号X0使用的是常开触点串联在控制线路中,这是因为外部停车设备选取按钮常闭触点所致,不操作该按钮,则输出Y0正常接通,若按下该按钮,输出Y0断电。
3. 停车按钮使用常开型
若希望编制出符合我们平时阅读习惯的梯形图程序(图4),则在选用外部停车设备时需使用按钮SB0的常开触点与X0相连。
图4 "起保停控制"梯形图程序(停车按钮使用常开触点)
图3、4梯形图完成相同的控制功能,程序中停车信号X0使用的触点类型却不相同,其原因就是连接在输入继电器X0上的外部停车按钮触点类型选用不同。图4所示梯形图程序更加符合我们的阅读习惯,也更易分析其逻辑控制功能,因此在PLC构成控制系统中,外部开关、按钮无论用于起动还是停车,一般都选用常开型,这是一个在使用PLC时需要格外注意的问题。
相位接反了,限位器还起作用吗?直接贸然的回答就是:没用。为什么呢?造成的问题严重吗?有办法改进吗?我们还是看看背后的故事吧。
既然已经涉及到限位器了,一般来讲,控制电路就需要对电机实施正反转控制。如图,是比较基本的点动正/反转控制线路图(上半部分为主线路,下半部分为控制线路)。
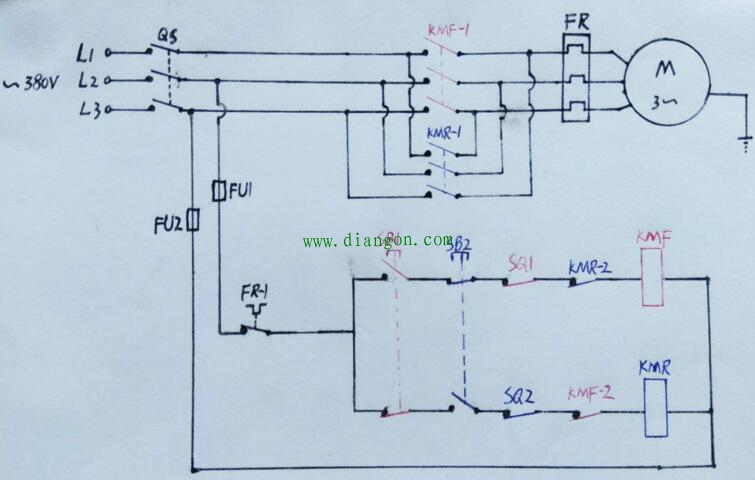
简单的说明一下:这里SB1和SB2为复合点动开关,用于人工操作,这种开关本身就带有互锁功能,按照常规,该线路依旧设置有互锁开关,即KMR-2与KMF-2。另外:图中的SQ1与SQ2为限位开关,QS为电源总开关,FU1与FU2为熔断器,FR为热保护继电器。
正常情况下,按下SB1,KMF线圈带电,KMF-1闭合,KMF-2断开,电机开始转动,我们假定此时为正转,设备的动作为向上行驶,当碰到限位开关SQ1时,SQ1将断开,KMF线圈因而断电,电机不再正向转动,设备也不能再向上行驶;按下SB2也是类似的控制,但电机反转,设备的动作为向下行驶。
若主线路接线时,接反相了会怎样呢?按下SB1,同样是KMF线圈带电,KMF-1闭合,KMF-2断开,电机转动,但此时由于反相,电机将会是反转,设备向下行驶,碰到的限位开关将是SQ2。就是说,一直按着SB1,电机一直反转,不会再有限位开关将SQ1所在支路断开,限位不起作用了。
从电路图来看,反相后,限位开关起不到该有的作用,这很明显。但很多非专业人士,或不求甚解的人,总是会被“限位”二字迷惑:以为“限位”就是能限制住设备的位置,装了“限位”就不可能逃出限制范围。
笔者就遇到过一件至今想来依然后怕的事。工地整改,要将塔吊的供电配电箱换一下。在拆掉旧配电箱上的线路时,当时也确实是记下了相位顺序,用脑子记的,后来就按照记忆,在新配电箱上按照相位顺序接了线路。由于种种原因,并没有提醒塔吊操作人员可能存在反相。该塔吊操作工也是较“猛”的一个人,上去后,就直接放“塔吊钩子”。正常来讲,就是塔吊小臂的钢绳往下放,钩子往下落。http://www.diangon.com/m417881.html但正如大家想的,相位接反了,“放钩子”变成了“收钩子”,由于那“小臂钩子”上的钢绳在上次停止作业时,就属于比较收拢的状态,又由于操作比较“猛”,钩子上方的钢绳很快收的没有,继而拉断,钩子轰然落地。万幸没有砸到人,但该事故也足以让人冷汗冒一身。
就事故本身来说,不合规范处太多:没有正确记录相位顺序,没有通知相关人员整改情况,没有改后试运营,等等等等。但对“限位”的过分相信也是很重要的原因,确实,当时包括塔吊操作人员在内的许多人都说:“塔吊上装有限位啊!”
虽然过份依赖“限位”可能会出问题,但话说回来,“限位”毕竟还是很重要的安全保护手段。那我们能不能让这份保护更加坚固呢?笔者思来想去,也只有应付的一个笨方法:加“保护限位”。(查资料也没怎么查到。)
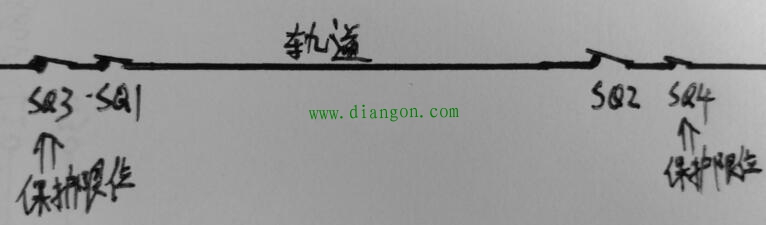
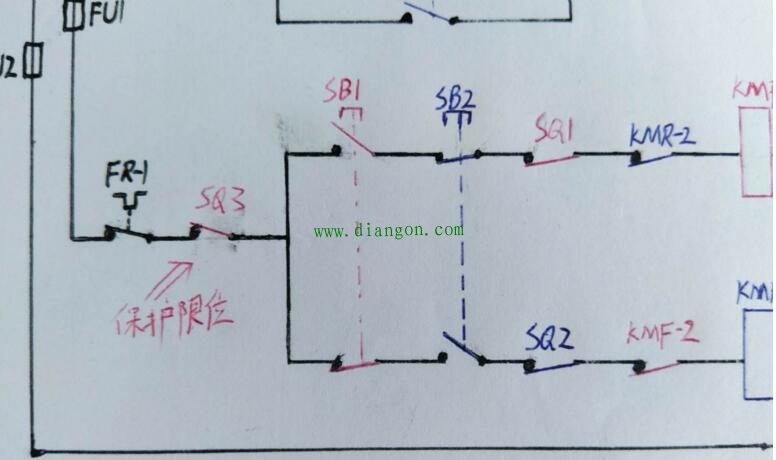
所谓“保护限位”,就是在限位开关之外再加“限位”,这个限位开关接在控制线路的主干路上(如图标记处),根据情况加一个或两个。
当出现类似反相这种情况时,设备越过常规限位开关后,就会碰到“保护限位”,于是整个线路断电。当然,该情况断电后需要检修调试。但毕竟这是不经常发生的事(这也许是一般设备都不设“保护限位”的原因吧?),并且相比较出现恶性事故,应该还算是划算的。
