兰州西门子一级代理商
S7-300采用了模块式结构,主要由机架(RACK)、电源模块(PS)、*处理单元模块( CPU)、接口模块(IM)、信号模块(SM)、功能模块(FM)和通信处理器(CP)等部分组成,如图2-1所示。S7-300的模块都有名称,同样名称的模块根据接口名称和功能的不同,又有不同的规格,在PLC的硬件组态中,以定货号为准。
图2-1 S7-300的硬件组成
(1)*处理器单元模块
各种型号的CPU模块有不同的性能,如有的CPU模块集成了数字量和模拟量的I/O通道,有的CPU集成了PROFIBUS-DP的通信接口。CPU模块面板上有状态指示灯、模式转换开关、24 V电源端子、电池盒和存储卡插槽。
(2)电源模块
电源模块(PS)用于将220 V交流电转换为24 V直流电,供给CPU和其他模块使用。电源模块的额定输出电流有2A、SA和10A三种,电源模块的面板上有工作开关和状态指示灯,当电源过载时指示灯会闪烁。
(3)信号模块
信号模块(SM)包括数字量和模拟量的I/O模块,它们作为PLC的过程输入和输出通道。信号模块主要有数字量输入模块SM321、数字量输出模块SM322、模拟量输入模块SM331和模拟量输出模块SM332。模拟量输入模块可以输入热电量、热电阻、直流4~20 mA和直流0~10 V等多种不同类型和不同量程的模拟量信号。信号模块通过背板总线将现场的过程信号传递给CPU。
(4)功能模块
功能模块(FM)主要用于对实时性和存储容量要求较高的特殊控制任务,如计数器模块、快速/慢速进给驱动位置控制模块、电子凸轮控制器模块、步进电动机定位模块、伺服电动机定位模块、定位和连续路径控制模块、闭环控制模块、工业标识系统的接口模块、称重模块、位置输入模块和超声波位置解码器等。
(5)通信处理器
通信处理器(CP)用于PLC与PLC之间、PLC与计算机之间、PLC与其他智能设备之间的通信,它可以将PLC连人PROFIBUS现场总线、AS-1现场总线和工业以太网,或用于实现点对点通信等。通信处理器可以减轻CPU处理通信的负担,并减少用户对通信的编程工作。
(6)接口模块
接口模块(IM)用于组成多机架系统时连接主机架(CR)和扩展机架(ER)。S7 -300通过主机架和3个扩展机架,zui多可以配置32个信号模块.功能模块和通信处理器(需要相应的CPU支持)
 S7-400 PLC模拟量I/O模块
S7-400 PLC模拟量I/O模块
模拟量输入模块SM431将从控制现场采集来的模拟量信号转换成S7-400内部处理用的数字量信号,可组态的分辨率从13位到16位,其性能特性如表2-34所示。

自由口通信
与上位机的通信通过PC Access,操作人员可以轻松通过上位机读取S7-200 SMART 的数据,从而实现设备监控或者进行数据存档管理。(PC Access 是专门为S7-200 系列PLC 开发的OPC 服务器协议,专门用于小型PLC 与上位机交互的OPC 软件)
运动控制
三轴 100 kHz 高速脉冲输出,*实现定位.
运动控制基本功能
标准型晶体管输出CPU 模块,ST40/ST60 提供3 轴100 kHz 高速脉冲输出,支持PWM(脉宽调制)和PTO 脉冲输出
在PWM 方式中,输出脉冲的周期是固定的,脉冲的宽度或占空比由程序来调节,可以调节电机速度、阀门开度等
在PTO 方式(运动控制)中,输出脉冲可以组态为多种工作模式,包括自动寻找原点,可实现对步进电机或伺服电机的控制,达到调速和定位的目的
CPU 本体上的Q0.0,Q0.1 和Q0.3 可组态为PWM 输出或高速脉冲输出,均可通过向导设置完成上述功能
PWM 和运动控制向导设置为了简化您应用程序中位控功能的使用,STEP 7- Micro/WINSMART 提供的位控向导可以帮助您在几分钟内全部完成PWM、PTO 的组态。该向导可以生成位控指令,您可以用这些指令在您的应用程序中对速度和位置进行动态控制。PWM 向导设置根据用户选择的PWM 脉冲个数, 生成相应的PWMx_RUN 子程序框架用于编辑。运动控制向导***多提供3 轴脉冲输出的设置,脉冲输出速度从20 Hz 到100 kHz 可调。
运动控制功能特点
提供可组态的测量系统,输入数据时既可以使用工程单位(如英寸或厘米),也可以使用脉冲数
提供可组态的反冲补偿
支持、相对和手动位控模式
支持连续操作
提供多达32 组运动动包络,每组包络***多可设置16 种速度
提供4 种不同的参考点寻找模式,每种模式都可对起始的寻找方向和***终的接近方向进行选择
运动控制的监控为了帮助用户开发运动控制方案,STEP 7- Micro/WIN SMART 提供运动控制面板。其中的操作、组态和包络组态的设置使用户在开发过程的启动和测试阶段就能轻松监控运动控制功能的操作。
使用运动控制面板可以验证运动控制功能接线是否正确,可以调整组态数据并测试每个移动包络
显示位控操作的当前速度、当前位置和当前方向,以及输入和输出LED(脉冲LED 除外)的状态
查看修改在CPU 模块中存储的位控操作的组态设置
编程

便利的指令库在PLC 编程中,一般将多次反复执行的相同任务编写成一个子程序,将来可以直接调用。使用子程序可以更好地组织程序结构,便于调试和阅读。STEP 7- Micro/WIN SMART 提供便利的指令库功能,将子程序转化成指令块,与普通指令块一样,直接拖拽到编程界面就能完成调用。指令库功能提供了密码保护功能,防止库文件被随意查看或修改。另外,西门子公司提供了大量完成各种功能的指令库,均可轻松添加到软件中
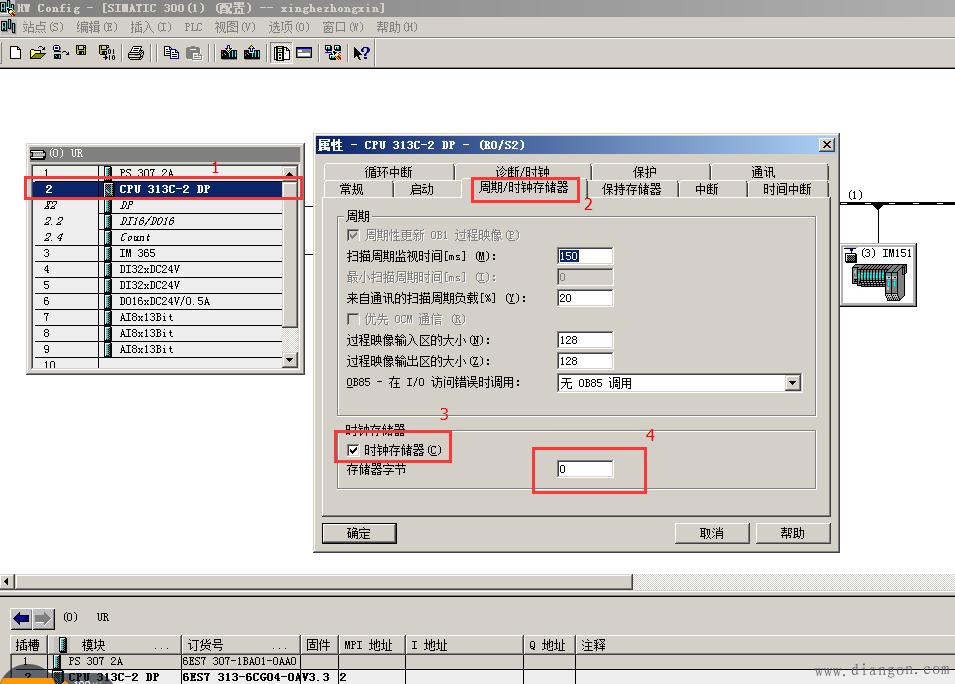
步:硬件组态
在硬件组态中双击CPU
弹出“属性”界面勾选“周期/时钟存储器”(clock memory)
勾选“时钟存储器”
然后填写地址 如图填写0就代表MB0
具体操作如下图:
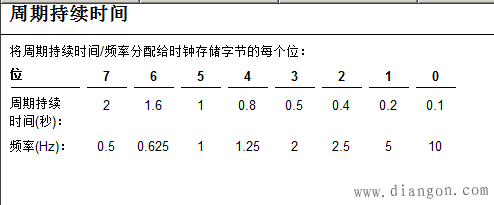
如下图所示 MB0中7个位对应的时间脉冲(此时间脉冲为方波,不是上升沿!)
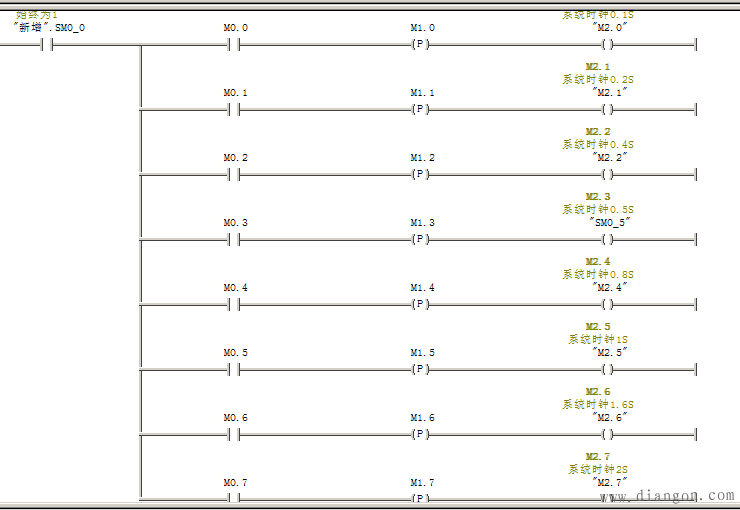
第二步:程序书写
如下图
之前设置的时钟存储器为MB0
由于设置的系统时钟为方波型,不能直接用于计时,需要做成上升沿(每隔N秒一次上升沿)
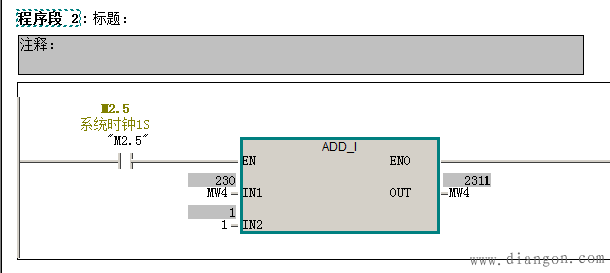
第三步:计时
可以通过用ADD_I指令来实现计时
将之前做的每隔一秒钟导通的上升沿作为使能,每隔1S中自加1一次,来实现计时