
西门子模块6ES7216-2AD23-0XB8厂家供应






西门子模块6ES7216-2AD23-0XB8厂家供应
系统中ET200eco从站中选用了8DI和16DI两种模板,模板结构紧凑,模板的供电采用7/8‘电源线,模板的通讯采用M12通讯接头。接线灵活而快速,方便拔插。其接口模块上带有2个旋转式编码开关用于profibus地址分配。
网络设备按照适应工业现场环境的程度,以及生产线的布局来考虑选用不同防护等级。控制箱中的模块采用防护等级为20的ET200S I/O模块,对应每个控制箱的还有一个防护等级为67的ET200eco模块,置于生产线滚轮下方,由于该模块需要接触到现场较为恶劣的生产环境,因此需要有防水防油防尘等功能。
3 目标控制系统
3.1 系统设计
汽车发动机装配线是一个对发动机顺序装配的流水线工艺过程。由于工艺的繁琐性,工程的计算机控制系统考虑采用分散控制和集中管理的分布式控制模式,采用以PLC为核心构成的计算机控制系统,各独立工位控制系统之间通过网络实现数据信息、资源共享。该装配线在整个生产过程中较为关键,由于每个工位之间是流水线生产,因此每个环节的控制都必须具备高可靠性和一定的灵敏度,才能保证生产的连续性和稳定性。从站中的每个ET200S站和其对应的 ET200eco站共同构成一个工位, ET200eco主要是采集现场数据之用。ET200S站的模块置于小型控制箱内, 对于工位的基本操作有两种方式,就地控制箱手动方式和就地自动方式。由于每个控制工位的操作进度不*,操作工可以按照装配要求进行手自动切换。特殊情况下亦可通过手动操作进行工件位置的修正。
安装在各工位的分布式I/O模块ET200S和ET200eco通过现场检测元件和传感器将系统主要的监控参数(主要是开关量)采集进来,ET200S和ET200eco将现场模拟量信号转换为高精度的数据量,通过zui高速度可达12M的Profibus-DP现场总线网络将采集数据上传到*控制器,控制器根据具体工艺要求进行处理,再通过Profibus-DP网络将控制输出下传给ET200S,实现各工位的控制流程。 PROFIBUS是应用zui广泛的过程现场总线系统。PROFIBUS有三种类型:FMS、DP和PA。PROFIBUS-FMS可用于通用自动化;PROFIBUS-DP用于制造业自动化;PROFIBUS-PA用于过程自动化。使用PROFIBUS过程现场总线技术可以使硬件、工程设计、安装调试和维修费用节省40%以上。PROFIBUS-DP的技术性能使它可以应用于工业自动化的一切领域,包括冶金、化工、环保、轻工、制药等领域。除了安装简单外,它有*的传输速率,可达12Mbits/s,通讯距离可达到1000米,如果加入中继器可以将通讯距离延长到数十公里,具有多种网络拓扑结构(总线型、星型、环型)可供选择。在一个网段上zui多可连接Profibus-DP从站即ET200S或是ET200eco 32个。
整个控制系统根据工艺划分由转台、举升台、举升转移台、翻转机五种工位组成。各部分可独立完成各自的控制任务,并通过工业以太网实现和上位监控系统的连接,由上位系统实现各部分的协调控制。
装配I线工程PLC控制系统和网络通讯系统具有下列特点:
(1)计算机集成自动化过程控制系统,分布式、高可靠性、高稳定性。
(2)从站作为相对独立的系统分散控制各个工位的运行。
3.2 系统控制要点

(1)该系统网络中一个主站CPU下两条profibus网络所带的从站有44个之多,在利用Simatic Manager编程软件进行硬件配置时,根据S7-300CPU中CPU31XC的地址分配的参数规范,对于数字量输入输出,其地址分配的参数范围为0.0~127.7。因此在进行硬件配置时, S7~300CPU自带的profibus-DP接口上的profibus I线上的模块数字量I/O地址一般规定在0.0~127.7的范围中,如有超出则采用间接寻址的方式来处理。profibus Ⅱ线上的模块的数字量I/O地址无论处在哪个范围中,都必须采用间接寻址方式。
ced27bb6203db6ba6a9f0ed61cd507bc.jpg
(2)关于接触器的硬件互锁。对于转台工位,转台有正转和反转两种工作状态,因此转台的回转电机需要有一个负荷开关和两个接触器一并来控制(而举升电机一般只需要一个负荷开关和对应的一个接触器即可进行控制),接触器分正转接触器和反转接触器,输入端为380AV。正转接触器的三相电压A、B、 C分别和反转接触器的C、B、A短接。如图2所示,当程序在执行过程中,若存在某些漏洞使得正转接触器和反转接触器的输出点同时置1时,则会出现正转接触器和反转接触器各自的A相和C相短接,造成接触器短路损坏,主电源开关跳闸。为了避免这种事故的发生,首先保证程序中不能出现两个接触器同时置1的情况,其次即是采用接触器上硬件互锁,如图2所示,点Q1、点Q2是输出控制点,Q1两端本应接在正向接触器的两个输入端子,同理, Q1两端本应接在正向接触器的两个输入端子,但是改接成如图所示。接触器上有自带的一个常开点和一个常闭点,互锁中只需用到常闭点,当输出点Q1闭合时,正向接触器上常闭点随之断开,则Q2输出点两端之间不可能形成回路,也就不会出现短路跳闸的事故。
(3)该项目中涉及到的变量数目较多,根据现场情况随时可能有更改,为了便于管理,采取S7程序界面和Wincc人机界面共用一套变量。这样可以将建立变量的工作量减少一半,也将出错概率减少一半。先安装step7软件,之后自定义安装Wincc软件,将Wincc通讯组件安装完整。然后在 step7软件中插入OS站,可点击右键打开并编辑Wincc项目。在Wincc项目中需要引用变量的位置进行变量选择,出现变量选择对话框,即可在 step7项目变量表中选择需要的变量,从而保证人机界面和下位机所用变量的*性。
3.3 系统控制功能
(1)手自动回路的切换
在Wincc人机界面上可以很方便地知道每个工位的手自动状态,但是手自动状态的切换是在从站的控制箱面板上实现的。在自动状态下,工位的操作全由下位控制,可实现全自动控制机械的操作流程。在手动状态下,操作具有自保护功能,在某些机械操作动作下通过软件互锁可杜绝相应的危险动作的发生。
(2)安全保护
上位监控系统设定了若干级操作密码,管理员和操作员分别有自己的操作权限,且操作员在进行操作时有必要的警告提示框和信息提示框出现。
(3)查询源程序代码
当上位机画面显示某个工位出现故障时,可从画面直接点击按钮进入相应的下位机梯形图程序界面,即可迅速查找出故障的根本原因,节省了维修时间。
(4)故障报警和报表打印
当设备出现故障时,报警框中会出现提示,并伴随有声音报警。操作员可根据需要打印与生产相关的报表信息
西门子6SN1123-1AB00-0HA2
可监控直流母线回路中是否过压/欠压。如果出现过压/欠压,则以故障形式显示出来。Vdc 控制用于避免或延迟过压/欠压关断。
将驱动结构作为支持驱动结构进行参数化
为使用 Vdc 控制功能,可通过设置 p1240 = 1、2 或 3 将具备足够动能的轴参数化为支持驱动结构。为支持直流母线电压,支持驱动结构加速或制动。
早在达到直流母线回路关断阈值之前,即可通过设置 p1240 = 4、5 或 6 来关断没有足够动能的轴。这只适用于那些在发生故障(如电源故障)时对维持直流母线回路电压不重要并且会因继续运行为直流母线回路带来负载的轴。
更改后的扭矩极限
当直流母线电压向直流母线电压上限值 (p1244) 上升或向直流母线电压下限值 (p1248) 下降,并且相应的控制器已激活时,Vdc 控制器就已作为比例控制器改变了扭矩极限。
因此,通过 p1240 = 1、2 或 3 进行了参数化的支持驱动结构可能会偏离设定转速。通过 p1240 = 7、8 或 9 进行参数化的支持驱动结构在必要时会延长加速和制动阶段,直至达到转速设定值。
您可借助以下公式来计算 Vdc 控制器的比例增益 (p1250):
p1250 = 0.5 x 直流母线电容 [mF]
直流母线电容 [mF] 可以在直流母线识别 (p3410) 结束后参见电源模块的 p3422。
电机模块的大电动功耗 (P电动) 为:
P电动 = VDC,实际值 x (VDC,实际值 - p1248) x p1250
电机模块的大功率回馈 (P回馈) 为:
P回馈 = VDC,实际值 x (p1244 - VDC,实际值) x p1250
电源模块故障
如需在电源模块发生故障时能够继续运行驱动结构,请按以下步骤操作:
将故障 F07841 的反应参数化为“无"。
或者
设置 p0864 = 1。
应用情况
Vdc 控制器应用于下列情形:
用于没有回馈能力的电源模块(大 Vdc 控制器)
用作电源故障时的保护措施(小和大 Vdc 控制器)
为关断那些在发生电源故障时对维持直流母线电压不重要并且会因为继续运行为直流母线回路带来负载的轴,可使用可参数化的故障。通过关断这些轴,可在出现故障时延长支持驱动结构的运行时间。
Vdc 控制的电压限值也会对 V/f 控制产生影响。只是此情况下 Vdc 控制的动态特性会慢一些。
Vdc_min控制
在电源断电后,电源模块不能再继续保持直流母线电压,特别是在直流母线组件中的电机模块从中接收功率后。
此时,为保持直流母线电压,以便进行可控的紧急停机,可以激活一个或多个驱动结构的小 Vdc 控制器 (p1240 = 2,3)。通常只有一个带 Vdc_min 控制的驱动结构被参数化为支持驱动结构。
当直流母线电压向直流母线电压下限值 (p1248) 下降时,Vdc_min 控制就已改变了扭矩极限。支持驱动结构的电动功率会降低,直至达到电压阈值。
如果低于电压阈值,支持驱动结构将通过制动将功率馈入直流母线回路。如果支持驱动结构的转速降至“0",说明支持驱动结构的动能已耗尽,无法再支撑直流母线回路。
边界条件
为了使支持驱动结构进入回馈式运行状态,p1248 中的电压阈值必须设置为高于支持驱动结构关断阈值 (r0296) 的值。
如果将电压和关断阈值设置为相同的值,当达到关断阈值时,支持驱动结构将关断,并且在关断时间点之前不向直流母线回馈任何功率。
电压阈值与关断阈值之间的小差值建议为 10 V。您可借助以下公式来计算电压阈值整定值:

P电动_大_已获取对应于所有直流母线耗电器从直流母线回路中获取的大电动功率。在该公式中,必须以数值的形式输入 P电动_大_已获取的值,不考虑正负号。
用于计算比例增益 (p1250) 的公式:p1250 = 0.5 x 直流母线电容 [mF]。
p1248 中的整定值不得高于正常运行时的直流母线电压。
电源恢复供电时的响应方式
在电源恢复供电后,Vdc 控制器自动失效。支持驱动结构再次加速至转速设定值。如果电源没有恢复供电,而支持驱动结构的动能已耗完,那么直流母线电压就会击穿。
电源恢复供电时,必须确保驱动连接没有与电源断开。为此,建议使用跌落式线路接触器。此外,线路接触器必须由无中断电源 (USV) 为其供电。

Vdc_min 控制(动能缓冲)的激活/取消
Vdc_min 控制、无制动
如果设置 p1240 = 8 或 9,则支持驱动结构会在直流母线电压较低时,在没有主动制动的情况下,将消耗功率多降至“0"。
Vdc_max 控制
在没有回馈能力的电源模块上或电源故障时,直流母线组件中驱动结构的制动过程可能会导致直流母线电压增大到断路阈值。
此时可以激活一个或多个驱动结构的 Vdc_max 控制器 (p1240 = 1,3),以避免因过电压导致断路。通常只有一个带 Vdc_max 控制的驱动结构被参数化为支持驱动结构。
当直流母线电压向直流母线电压上限值 (p1244) 升高时,Vdc_max 控制就已改变了扭矩极限。支持驱动结构的回馈功率会降低,直至达到电压阈值。
如果超出电压阈值,支持驱动结构就会通过加速从直流母线回路中取电。此时,支持驱动结构将接收其他驱动结构在制动时馈入直流母线回路的功率。此外还缩短了制动阶段。支持驱动结构达到大转速时,就会关断且不再接收功率。支持驱动结构无法再支持直流母线回路。

Vdc_max 控制的激活/取消
边界条件
为了使支持驱动结构进入电动运行状态,p1244 中的电压阈值必须设置为低于支持驱动结构关断阈值 (r0297) 的值。
如果将电压和关断阈值设置为相同的值,当达到关断阈值时,支持驱动结构将关断,并且在关断时间之前不会从直流母线回路中取电。
电压阈值与关断阈值之间的小差值建议为 10 V。您可借助以下公式来计算电压阈值整定值:

P回馈_大_已馈入对应于所有直流母线耗电器馈入直流母线回路中的大回馈功率。在该公式中,必须以数值的形式输入 P回馈_大_已馈入的值,不考虑正负号。
p1244 中的整定值不得高于正常运行时的直流母线电压。
Vdc_max 控制、无加速度
如果设置 p1240 = 7 或 9,则驱动结构会在直流母线电压较高时,在没有主动加速的情况下,将回馈进直流母线回路中的功率多降至“0"。
Vdc_min 监控
在电源断电后,电源模块不能再继续保持直流母线电压,特别是在电机模块从直流母线回路上取电的情况下。
为了防止电源故障时一些不关键的驱动结构消耗直流母线电压,可通过故障 F07403 和 p1248 中的可参数化电压阈值来关断这些不关键的驱动结构。为此,激活 Vdc_min 监控 (p1240 = 5,6)。
Vdc_max 监控
在没有回馈能力的电源模块上或电源故障时,驱动结构的制动过程可能会导致直流母线电压增大到断路阈值。此时可以激活一个或多个驱动结构的 Vdc_max 控制器 (p1240 = 1,3),以避免因过电压导致断路。
为了防止电源故障时一些不关键的驱动结构消耗直流母线电压,可通过故障 F07404 和 p1244 中的可参数化电压阈值来关断这些不关键的驱动结构。为此,激活 Vdc_max 监控 (p1240 = 4,6)。
消息(参见 SINAMICS S120/S150 参数手册)
F07403
驱动结构:达到直流母线电压阈值下限
F07403
驱动结构:达到直流母线回路电压的阈值上限
F07841
驱动结构:撤消供电运行
功能图(参见 SINAMICS S120/S150 参数手册)
5300
伺服控制 - 诊断用的 V/f 控制
5650
伺服控制 - 大 Vdc 控制器和小 Vdc 控制器
参数(参见 SINAMICS S120/S150 参数手册)
r0056.14
CO/BO:闭环控制状态字:Vdc_大控制器有效
r0056.15
CO/BO:闭环控制状态字:小 Vdc 控制器生效
r0296
直流母线电压欠电压阈值
r0297
直流母线电压过电压阈值
p0864
供电运行
p1240[0...n]
Vdc 控制器或 Vdc 监控的配置
p1244[0...n]
直流母线电压阈值上限
p1248[0...n]
直流母线电压阈值下限
p1250[0...n]
Vdc控制器的比例增益
p3410
电源识别方式
p3422
电源直流母线电容
PROFIBUS 手轮选项 (机床参数19334 bit7=1)
STEP 7 配置:
STEP7项目文件中,2个Profibus MCP配置2个Profibus手轮。
本例配置第3、4、5、6手轮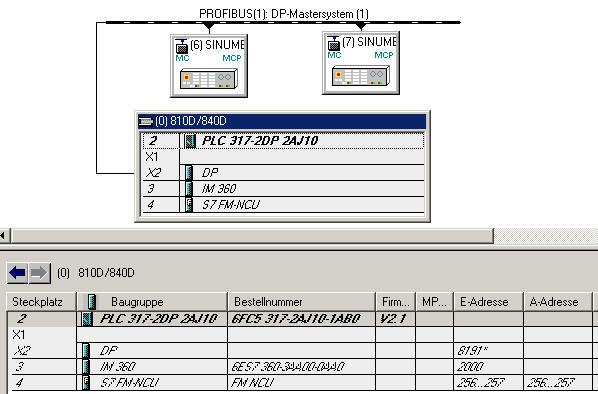
每个机床面板可以配置2个手轮X60和X61
配置中,每个Profibus手轮分配2个字节。.
第1机床面板DIP设置
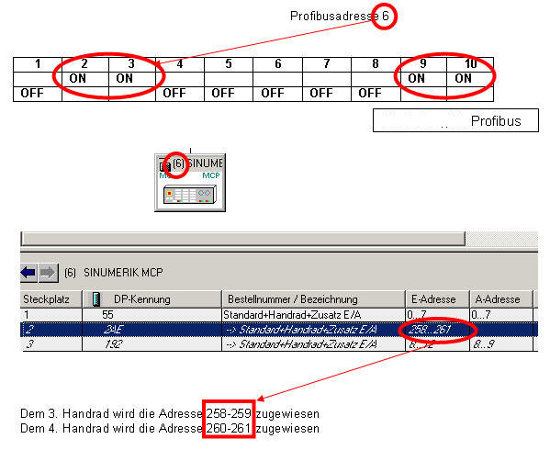
第1机床面板DIP设置
机床参数设置:
允许配置6个手轮: N11324 $MN_HANDWH_VDI_REPRESENTATION=1 通道和轴的手轮接口信号使用二进制编码(支持6个手轮)
参数11350定义手轮来源
机床数据说明手轮连接的方式:
0 = SEGMENT_EMPTY ;无手轮
1 = SEGMENT_840D_HW ;连接840D X121
2 = SEGMENT_802DSL_HW ;连接到802Dsl
5 = SEGMENT_PROFIBUS ;连接Profibus模块
7 = SEGMENT_ETHERNET ;通过以太网连接t
N11350 $MN_HANDWHEEL_SEGMENT[0] =1 1.连接到 X121
N11350 $MN_HANDWHEEL_SEGMENT[1] =1 2.连接到 X121
N11350 $MN_HANDWHEEL_SEGMENT[2] =5 3.连接到MCP 1的X60
N11350 $MN_HANDWHEEL_SEGMENT[3] =5 4.连接到MCP 1的X61
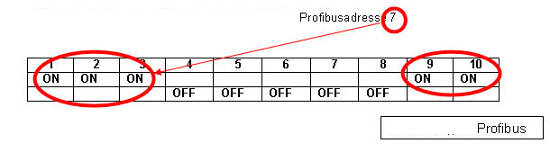
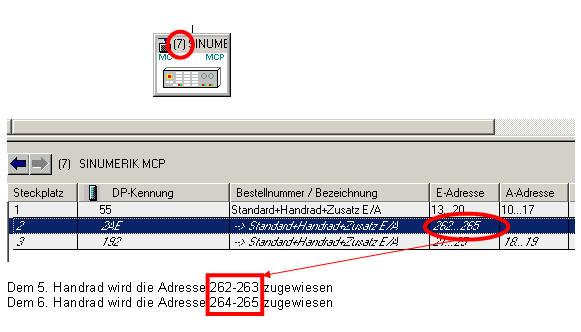
N11350 $MN_HANDWHEEL_SEGMENT[4] =5 5.连接到MCP 2的X60
N11350 $MN_HANDWHEEL_SEGMENT[5] =5 6.连接到MCP 2的X61
手轮参数 11351
配置手轮连接的硬件模块.
(content of MD11350 $MN_HANDWHEEL_SEGMENT dependent):
$MN_HANDWHEEL_MODUL =
0 = 无手轮
1 ;840D硬件
1 ;802Dsl硬件
1..6 ;Prifibus/prifinet模块的模块号;
参数MD11353 $MN_HANDWHEEL_LOGIC_ADDRESS[(x-1)]的索引号
1 ;以太网
N11351 $MN_HANDWHEEL_MODULE[0] =1 1st 手轮
N11351 $MN_HANDWHEEL_MODULE[1] =1 2nd 手轮
N11351 $MN_HANDWHEEL_MODULE[2] =3 3rd 手轮
N11351 $MN_HANDWHEEL_MODULE[3] =4 4th 手轮
N11351 $MN_HANDWHEEL_MODULE[4] =5 5th 手轮
N11351 $MN_HANDWHEEL_MODULE[5] =6 6th 手轮

- 西门子CPU 226 6ES7216-2BD23-0XB8继电器模块 参数
- 西门子6ES7216-2BD23-0XB0模块
- 西门子CPU226 继电器输出,24输入/16输出模块6ES7216-2BD23-0XB8
- 西门子CPU226CN控制器控制器6ES7216-2BD23-0XB8
- 西门子CPU226CN控制器控制器6ES7216-2AD23-0XB8
- 西门子6ES7216-2BD23-0XB0无锡现货供应
- 西门子6ES7216-2AD23-0XB0模块江西代理商
- 西门子代理商6ES7216-2BD23-0XB8
- 西门子模块代理商6ES7216-2AD23-0XB8西门子触摸屏代理
- 西门子模块代理商6ES7216-2BD23-0XB8西门子触摸屏代理