
西门子6ES7222-1HF22-0XA8大量库存





西门子6ES7222-1HF22-0XA8大量库存
1、性能比较
比较上述驱动电路的
基本性能可概括如下。
1)单极性驱动电路:这里指单、单极性驱动电路,每相只用一只功率管。线路简单、成本低,但效率也低,启动和运行频率均不高。现常用来驱动小功率。
2)双极性驱动电路:线路复杂,效率高。常用来驱动永磁式电机、混合式电机或大功率电机。
3)高低压驱动电路:线路较简单。双电源,每相需要两只功率管。效率较高,启动和运行频率比单极性电路高。
4)斩波驱动电路:双电源成高压单电源。运行特性好,效率高,但线路复杂。
5)调频调压驱动电路:控制电路较复杂。因为v随f改变,所以,效率、运行特性等都有了明显改善。
6)细分驱动电路:线路复杂。运行特性好。微机的应用已使它成为很有发展前途的驱动方式之一。
2、驱动电路实例
1) 图1是斩波驱动的一个应用实例。被驱动的电机是36by3-30型三相步进电机。它的a、b、c三相分别接在图示电路的a、b、c端。a、b、c三端的输入分别接电路的d03、d02、do1。
该电路有两种工作状态:(1)步进方式;(2)维持方式。处在步进工作方式时,流过取样电阻r0和相绕组上的电流为2a;处在维持方式时,仅为0.5a。工作方式的转换受程序控制。该程序送“1”给do5时,则为步进方式。送“0”时,为维持方式。
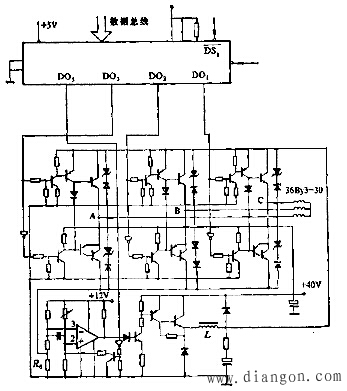
图1 斩波驱动应用实例
实际上,是用do5电位的高低改变比较器比较基准端“2”的电位。do5电位高,“2”端电位抬高,则比较器“3”端的翻转电位也随之提高。即取样
电阻r0上的电压随之提高,流过r0的平均电流相应增大。反之,‘2”端电位降低,流过r0的平均电流相应减小。
斩波驱动由比较器、比较器后面的放大电路、l、c、r等电路形成。假设比较器的“3”端电位高于“2”端,它的输出为低电位。由组成的放大电路截止,加到相绕组上的电压逐步衰减,流过r0上的电流和ir0也随之降低。经过一定时间后,“3”端电位低于“2”端。经比较器比较后,输出高电位。(http://www.diangon.com/版权所有)放大电路的输出电压升高。流过取样电阻r0上的电流以回路时间常数所决定的规律逐步上升,r0上的压降ir0也随之上升。当“3” 端电位再一次高于“2”端时,比较器的输出再次变低。如此循环,形成斩波输出。
驱动电路的另外3个输入端do1、d02、d03受程序控制,用来决定步进电机的正反向旋转。正转时,以abc→abc→abc→abc→abc→abc→abc→…方式工作;反转时,以abc→abc→abc→abc→abc→abc→abc→…方式工作。

图2 喷墨打字机中使用的步进电机驱动电路
2)图2是喷墨打字机中使用的驱动电路。被驱动的是四相步进电机,步距角为3.6°。驱动电路由四只、四只晶体管、两组双线绕组、两只限流电阻和一只36v稳压管组成。稳压管以图示方式与二极管串联后,并联在线圈两端。这种方式与单纯并二极甘或并二极管-电阻相比,能在晶体管截止之后,使回路电流衰减得更迅速。除此之外,截止后,加在集电极上的高电压是电源电压加稳压管的稳定电压,而与电流无关。在图示电路中,为60v。这使得决定
大集电极电压的额定值变得很容易。图中的串联电阻主要是为了迅速建立激磁电流和改善转矩特性而设。设绕组电阻为rw,串联电阻为r;则串联r后,电路的时间常数将从l/rw减少为l/(rw+r)。
系统设计时首先考虑稳态性能。由允许的大位置误差和要求的高步进频率选择和驱动电路。完成了这种选择之后,接下来应考虑怎样对电机和驱动电路进行控制,怎样把它们连接到系统的其他部分。开环控制具有简单因而成本低等优点,常用于简易的经济型改造等技术中。图1是典型的开环控制系统的方框图。相控制信号可以由微处理机产生,也可以用某种形式的时序电路产生。不管这种信号怎样产生,设计者都需要知道它在定时上有些什么限制。例如特定负载转矩的高步进频率;又如电机加速负载惯量的时间等。
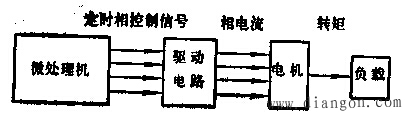
图1 典型的开环控制系统的方框图
开环控制方案中,负载位置对控制电路没有反馈,因此,步进电机必须正确地响应每次激磁变化。如果激磁变化太快,电机不能够移动到新的要求的位置,那么,实际的负载位置相对控制器所期待的位置将出现误差。如果负载参数基本上不随时间变化,则相控制信号的定时比较简单。但是,在负载可能变化的应用场合中,定时必须以坏(即大负载)情况进行设定。当然,这样确定的控制方案对所有其他负载并非佳。
1. 启停频率
简单的开环控制方式是步进频率恒定的那种控制方式(图2),电机在达到目标位置之前都以这个频率转动。相控制信号由时序发生器产生,时序发生器由来自恒频时钟的步进命令脉冲触发。“启动”信号接通这个时钟,使电机以等于钟频的步进频率运行;“停止”信号关断这个时钟,使电机停转。转动方向一开始就送到相时序发生器,因此,它产生的相控制信号能以合适的方向运转电机。目标位置送入减法计数器,并以这个计数器记录执行的步致。时钟脉冲同时送给相时序发生器和减法计数器。于是,相激励以恒定的钟频变化,减法计数器记录电机相对目标的瞬时位置。

图2步进电机的开环控制系统
负载达到目标位置时,减法计数器的内容成为零。时钟的“停止”信号利用这个零产生。如果恒定钟统频率太高,电机不能把负载惯量加速到对应的步进频率;系统或者完全不能工作,或者在行程的开始阶段失步。从静止开始,电机能响应而不失步的高步进频率叫做“启动频率”。与此类似,“停止频率”是系统控制信号突然关断,而电机不冲过目标位置的高步进频率。对任何电机-负载组合来讲,启动频率和停止频率之间的差别都很小。粘性摩擦使加速度和步进频率降低,但有助于减速,因此,提高了停止频率。不过,在简单的恒频系统里,时钟必须调整在两者之中较低的那个频率上,以此确保可靠的启动和停止。
电机从静止开始加速时,步进频率很低;每相激磁周期比相电路的时间常数长得多。在这种情况下,系统性能能够用电机的静转短/转子位置特性来分析。分析结果得知,(1)如果电机的转矩(tm)增大或负载转矩(tl)减小,则能提高启动额率;(2)减少系统惯量(电机惯量+负载惯量)也能提高启动频率。
在系统工作寿命内.由于零部件磨损,将影响负载转矩。为了允许负载转矩略为变化,恒频钟应比求得的启动频率略低,且可调。为了确保系统在工作速度情况下对机械谐振不敏感,还应考虑失步转矩/频率特性。如果算得启动频率恰巧等于谐振频率,那么,应改用较低频率的时钟,或者通过增加阻尼降低谐振影响。实际工作中,启动频率也常常通过试验求得。
2.加速和减速工作
因为步进电机系统的启动频率比它的高运行频率低得多,因此,为了减少定位时间,常常通过加速使电机在接近高的速度下运行。随着目标位置的逼近,为使电机平稳地停下来,重新使步进频率逐渐降低到启停电机频率。从初始位置往目标位置运动的整个过程中,步进频率都在变。若以曲线表示即得“速度曲线”,如图3所示。注意;减速可以比加速快得多,因为负载转矩帮助系统

图3加速到高频率和减速到目标位置曲线
制动;而且,电机产生的减速转矩比 (a)速度曲线;(b)对应的位置/时间响应曲线
加速转矩大。
3.开环控制的实现
对任何系统,选择控制方式都要考虑性能高和成本低等要求。例如,为了使加速方式佳,也许要求按指数曲线上升,但是,实现的费用高。设计者也许会用比较简单的线性斜坡来折衷,因为这种斜坡能以很低成本实现。另一方面,工艺的迅速发展,使我们能以低价制成的芯片得到各种各样的电路功能,因此,估计以微处理机控制的潜在优点成为很现实的问题。在微机控制的系统中,常常可以把微处理机的富裕处理能力用来控制步进电机。这时,额外的存贮器成本和软件开发成本的增加很可能低于独立的硬件控制器的价格。
(1)以微处理机产生定时 微处理机很容易产生控制步进电机所要求的数字信号。开环控制中,即使负载很轻,步进电机也很少以大于10000步/秒的速度工作,因此,只要求微处理机每0.1毫秒发一次步进命令。而每次发送步进命令所需要的程序执行时间比0.1毫秒小很多,所以,微处理机完全有多余能力执行别的任务。使用中断子程序控制电机能使处理能力得到充分利用。

图4是步进电机控制程序的一种流程图。在这个实例中,执行的步数是
固定的,步进命令之间的时间受从“table”单元开始的查阅表里存储数值的控制。程序以设寄存器“指针”等于“table”开始,因此,“指针”里装有查阅表中个值的地址。然后,把次步进命令发给激磁时序控制器,用它改变电机里的相激磁。
在发下一次步进命令之前必须进行延时,使电机有时间执行步。这时, 取出由指针寻址的延时数(次为查阅表里的个值)并把它存入“延迟”单元里。然后,检查这个单元的内容是不是零。如果是零,表示已经走到了这个表的末尾;不是零则“指针”加一,指向表内的下一个数。后,控制程序返回主程序。
主程序继续执行直到发生下次时钟中断,它使处理机返回到电机控制子程序的“入口”。‘延迟”单元里的数减一并且与零比较。如果不为零,则控制立即返回主程序;如果“延迟”单元已达到零,则把下一步命令送到激磁时序控制器,并且往“延迟”单元装入查阅表里的下一个位。因此,步进命令之间的时间与恒定的时钟周期及查阅表中的数值成正比。例如:步命令发出之后,“延迟”单元装入“30”,于是,“延迟”单元减到零之前将产生30次时钟中断。
查阅表中的数值是考虑以6步上升到高步进频率设置的,这个高频率是钟频的l/l0。减速从长延时数值(25)开始,这个时间对应转子转过平衡位置而进入产生减速所需要的负转矩的位置。因为负载转矩产生的是负转矩,所以,使电机减速只需要4步。后,系统逐渐静止,距离初始位置共14步。这时,程序检
测到“延迟”单元内容为零

图5步进电机开环控制流程图
并转到“停止”。 考虑14步运动的”延迟”值取样表
该例中,走过的距离是
固定的。不过,行程开始之前,程序可装入不同的目标位置。通过扩展查阅表和修改有关程序,能使步数增加。如果目标离初始位置少于14步,这时,可以删去查阅表里适当的位,使频率降低,步数减少。
(2)以硬件定时 如果加速系统需要执行的步数比较少,那么,相激磁定时可以用数字集成电路产生。例如,在图5 (a)小,jingque的前三步定时由持
续时间可变的延时时序电路产生,用它把电机加速到由系统钟频确定的步进频率。当接近目标位值时,利用后面的延时时序电路使电机减速。
系统初静止,启动脉冲加到 “启动”输入端后,经过一系列逻辑“或”门作用到相序发生器上,相序发处器发生的激磁变化启动电机加速。启动脉冲同时触发级延时电路,把这个脉冲延迟t1时间,在这期间,电机运动到第—次相转换位置。经过t1延时后,级的脉冲输出送到相序发生器并触发下级延时电路。这种时序一直继续到所有延时电路都工作完。末一级延时的输出用来启动恒频时钟,以恒频时钟生以后的步进命令,定时波形如图5(b)所示。
因为事先把目标位置送入了减法计数器。以后每执行一次,计数器就减一。因此,这个计数器记录着到达目标位置之前需要发出的步进命令数。当还需要执行的步数等于减速延时电路数时,减法计数器产生一个脉冲, 关断时钟并触发级减速电路延时t1,。到达目标位置之前的后几步的减速控制由三级持续时间可变的延时t1,、t2,、t3,产生,它们顺序触发,产生送到相序发生器的步进命令。减速以长激磁周期(t1,)开始,让转子转过平衡位置和产生负转矩。 如果系统的大工作速度接近失步频率,那末,也许需要20到50级
延时,这时成本很高。通常,硬件定时仅用在工作速度比正常的启停频率高得不太多的场合。在这些应用中,延时时间能够用静转矩/转子位置特性曲线成功地预测。
一、引言
电镀主要分为挂镀和滚镀。挂镀自动生产线分为环形机械或液压式自动生产线和直线式生产自动线。直线电镀自动线的制造以无锡市周边工厂较多,此外南京、北京、合肥、杭州、广东均有很多有名的工厂。本文就台安新型智能型SV300系列变频器应用于轻型直线挂镀自动线的行车运行情况作简单介绍。
二、电镀设备及工作原理简介
电镀生产线主要设备包括:机架、槽体、行车组成。槽体由退锡、去油、腐蚀、抛光、活化、电镀以及水箱组成,其中去油、腐蚀槽体中装有加热及温控装置,电镀槽中有加热、温控装置和冷却装置,冷却通过手动调节阀门达到降温目的,水箱中装有液位控制器。槽体由聚丙烯板焊接而成,槽体内部有相应的排风口、排污口、内外溢流口、进水口。行车由电机、升降导轨、水平导轨等部件组成。通常都是采用进口的可编程序控制器(PLC)对生产线各工序实施程序控制,它改写程序方便、体积小、可靠性高。新的发展是使用PLC和计算机构成的网络系统。在行车运行方面普遍采用变频调速器控制行车的运行速度。用接近开关控制行车的准确定位。

图1,直线式电镀自动线
三、SV300应用说明
对行车的控制具体为使上升、下降,前进、后退的动作。一个典型的工作顺序为:行车的前进或者后退,到达镀槽的位置,然后下降将镀件浸没于槽中,待电镀完毕再上升。该行车的控制时序是由PLC控制的。为了实现快速平稳的控制电机的起停,该电机采用了台安SV300型变频器来进行控制,变频器的起停和速度信号由PLC给定。变频器的运行采用外部端子接线。将变频器TM2端子台的S1-S5分别接到PLC上,通过PLC控制S1、S2的通断来实现变频器的正反转和停止。

图2,电镀设备挂镀件的行车
为了使行车运行的快速和平稳动作,使用固定的给定速度是很难实现的,但是,采用模拟的给定方式控制变频器的转速方式则成本会增加很多,而且电路比较复杂,不便于实际应用,所以折中采用了变频器多段速控制的方式。SV300变频器有7级速度可以切换,使用几个外部功能端子S3、S4、S5就可以控制各段速度的切换。实际使用时采用了三段速的方式,启动时采用低的速度,然后经过中速到达高速运行,接近停止位置时经过中速到低速运行,直到到达停止位置时停止。同时为了让行车快速的响应由PLC发出的启动和停止信号,要求变频器设定较短的加减速时间,并采用带刹车的电机。但由于过短的加减速时间有可能会使变频器因减速过流而停止,因此给变频器加上一个刹车电阻。
主要SV300参数设置如下: 1-00=1,3-00=80Hz,3-02=1S,3-03=1S,6-02=12Hz,6-03=40Hz,6-04=65Hz。

图3,电镀设备控制柜
四、结语
直线式电镀自动线的控制核心是PLC,通过PLC控制使系统具有可靠性高、抗干扰能力强、易于操作等特点。而台安SV300型变频器的应用使得行车能够快速平稳的运行,通过PLC对变频器的外部控制也使得操作非常的简单和快速

- 西门子S7-1200 SB1222 数字量信号板模块6ES7222-1AD30-0XB0
- 西门子SM1222 数字量输出模块16输出24V 6ES7222-1BH32-0XB0
- 西门子SM1222 数字量输出模块, 16输出继电器6ES7222-1HH32-0XB0
- 西门子SM1222 数字量输出模块6ES7222-1XF32-0XB0 8输出切换继电器
- 西门子SM1222 数字量输出模块6ES7222-1BF32-0XB0 8输出24V 8输出24V
- 西门子SM1222 数字量输出模块6ES7222-1HF32-0XB0 8输出继电器
- 西门子6ES7222-1BH32-OXBO 现货 质量保证
- 西门子6ES7222-1HF22-0XA8授权代理商-现货供应
- 模块 6ES7222-1HH32-0XB0具备外部短路保护功能
- 西门子S7-200 EM222 4出继电器6ES7222-1HD22-0XA0