

6ES7231-0HC22-0XA8产品型号
圆网印花机是一种使用圆形镍网在白色坯布上可连续印制各色图案专用加工设备,工作原理类似套色印刷机,整机包括进布、主机、烘房、落布这四大部分,主机部分是由主电机经蜗轮蜗杆减速机后带动一直径约450毫米(长由1.8米到3米不等)辊子,辊子带动厚两毫米多的聚氨脂导带转动,由直径较小的被动辊拉紧导带,使与辊子导带间无打滑,导带在两辊间形成一平面,坯布被贴紧导带经由色网到后一色网位而进入烘房将布烘干。只要网子与导带严格同步,且网子间任意时刻相位没有误差,则可以在高速运动中(高速为120米/分)严格保持0.1毫米的印花精度(这也是印花导带的高精度)。与数控技术在机床中应用一样,先进的圆网印花机用网头单电机驱动技术淘汰了落后的机械减速箱长轴传动的方式,克服了原机械传动间隙和磨损对印花的影响。与数控加工技术相比,他是一种高速高精度同步技术,升降速不能有明显的速度和位置误差。而不能象数控那样有时需降低进给速度来保证较小的误差。全伺服圆网印花机是指主电机与网头独立传动电机均采用伺服电机,而进、出布电机是采用变频电机拖动。
德高的圆网印花机电控系统由两大部分组成,基于底层开发的先进电子技术实现的高速高精度同步运动控制,使网头电机(步进或伺服驱动)jingque跟踪布速(通过高分辩率编码器测主辊角速度间接得到)。实现套色印花。变化的位置信息因快10微秒系统就可在线处理。因此可使一秒内车速由80米/分降为零都不会产生多大位置误差,这一点在国内是唯一能同国外先进系统相比的。另一大部分是由通用PLC实现的整机由进布到出布同步拖动控制及操作控制,以触摸屏完成速度模拟条显示,升降速的不同速度段快捷键一键操作,及故障滚动显示。界面如图1所示。

系统的逻辑动作较为简单,PLC程序没什么难度,此处只举一例,供大家参考,整机除可用触摸屏操作外,仍保留按扭操作,按扭中常用的为启/停按扭,为了减少外部连线并节约PLC的输入口,我们在如停车状态时需要操作的圆网自转开/停按扭,采用了单按钮操作,即次按下为开,在按一次为停。现以FX系列PLC为例说明实现方法,此处是采用计数器法。假设输入按钮接在X001,输出为Y001,梯图为图2示:

其中PLSY发脉冲指令在FX系列PLC中只能从Y0输出,此一点因PLC不同而不同。

系统的同步控制我们采用了两种方式;种方式较为简单,技术要求低用模拟电压为给定控制主伺服电机和进落布烘房变频器的给定(原理如图3示),为使线速度一致采用数字式同步控制器实现同一主给定下各路不同比例输出(价格比PLC专用D/A模块便宜,输出模拟电压为12位D/A,精度也足够,除主电机外,进落布取调节布张力的松紧架信号(实质为±5V供电的电位器),因此同步器的数学表达式可描述为:Ui=Um*Ki+Uf*Kfi(输出高电压为10V,其中:Ui为第i路输出,Um为主令电压,Ki为第i路输出比例系数,Uf为该路反馈电压,Kfi为反馈系数),实际调试中为使布受的张力均匀,特别是升降速时同步效果好,除松紧架反馈系数合适外,还要注意变频器的升降速时间参数设不可太长,以免反馈信号作用后反应时间太慢造成同步不好。我们选用的同步器带外部升、降数字信号输入,即UP与DOWN与其相应的地接通可使输出电压升高和降低,因给定为内部数字给定,使输出模拟电压稳定性很好,再采用伺服电机驱动从而保证了主传动的稳定。这里值得一提的是我们采用了主伺服电机驱动器上编码器输出差分信号,来测量主电机的速度,实现自动按设定速度升降速,自动停车,自动判断导布速等功能,所有参数可通过触摸屏进行参数的修改,如升降速时间,导布速调节。伺服驱动编码器接口到PLC的接口电路如图4示,不仅实现了隔离,且完成信号类型和电平转换。
FX2N系列有高速脉冲输入口,用SPD指令可以完成对速度的测量,要注意的是用于速度控制要留有误差带,不然会引起速度的振荡。

第二种方案是采用总线通过通讯控制完成坯布输送的同步,从而省去同步控制器。完全的数字化控制,不仅减少了连线,系统的可靠性和抗干能力都大大提高。而且伺服或变频器的故障原因可直接在触摸屏显示出来。系统框图如图5示。其中松紧架的反馈信号则送入变频器,实现对主令速度的微调整,反馈系数可直接在变频器设置或在触摸屏设置,用485总线送入变频器。不管采用什么品牌的PLC为得到良好的实时特性和同步的一致性,避免因通讯的延迟在升降速过程对电机同步的影响,我们采用中断控制的方法,效果是很好的。欧母龙的通讯有专用指令很简单,在此不再赘述。

后再谈谈系统中的另外一个特色,先推出独立传动系统时采用的是单片机作为主机,已经有了彩色触摸屏了,整机拖动部分采用PLC后,刚开始的改造我们采用了增加一个PLC专用的触摸屏。随后为了使整机能够合二为一,我们选用了两种方案。主要区别是用谁来做主机。是单片机还是PLC,不管用什么方法,都要完成单片机同PLC的通讯。如用单片机作为主机,易于大量参数的存储,这样PLC就成了下位机了,在主机上增加有关PLC操作及参数设置的画面,信息参数经单片机通讯至PLC就可以了。 当然这一技术的关键是要清楚所使用PLC的通讯协议,欧母龙的通讯协议是开放的。直接可从编程手册中获得。以三菱FX2N系列PLC为例:表1为PLC专用专用协议通信的指令。
表1
指令 注 释
BR 以1点为单位,读出位元件的状态
WR 以16点为单位,读出位元件的状态;或以1为单位,读出字元件的值
BW 以1点为单位,写入位元件的状态
WW 以16点为单位,写入位元件的状态;或以1为单位,写入值到字元件
BT 以1点为单位,置位/复位(SET/RESET)位元件
WT 以16点为单位,置位/复位(SET/RESET)位元件,或写入值到字元件
RR 控制PLC运行(RUN)
RS 控制PLC停止(STOP)
PC 读出PLC设备类型
TT 连接测试
注:位元件包括X、Y、M、S以及T、C的线圈等;字元件包括D、T、C、KnX、KnY、KnM等
FX系列PLC通讯协议规定PLC无论在运行还是在停止时,都可以接收上位机的4种监控命令,每种命令用唯一的命令码标识,如表2示
表2
监 控 命 令 命令码 目 标 单 元 说 明
读取单元 30H X、Y、M、S、T、C、D 成组读取目标单元的状态
写入单元 31H X、Y、M、S、T、C、D 成组写入数据到目标单元
单元置位 37H X、Y、M、S、T、C 置位目标单元的映像寄存器
单元复位 38H X、Y、M、S、T、C 复位目标单元的映像寄存器
PLC与单片机之间是以报文方式进行数据传输的,数据传输单位为帧。表3给出了通讯中所用到的控制字符。
表3
控 制 字 符 ASCII 说 明
ENQ 02H 询问:主机向PLC发送的请求通信信号
ACK 06H 确认:PLC对主机返回的肯定应答信号
NAK 12H 否认:PLC对主机返回的否定应答信号
STX 02H 文始:表示报文正文开始
ETX 03H 文终:表示报文正文结束
命令帧采用和校验(Sum Check)方式检错,格式如图示
起始标志 命令码 数据区 结束标志 和校验值
STX CMD DATA ETX SUM
UPPER SUM
LOWER
1个字符
1个字符
多个字符
1个字符
1个字符
1个字符
通讯时,单片机先向PLC发送询问(ENQ)信号,请求通讯并等PLC响应。PLC接收到该字符后,若通讯正常,PLC应答信号为确认(ACK),否为(NCK)。单片机收到确认信号便可发送相应命令并等PLC应答,如此可以完成单片机对PLC的控制。
我们用PLC和自主开发的运动控制系统组成的全伺服圆网电控系统,在国内使用多套,用户反映良好,把先进电子技术应用到传统印染装备行业,提高了装备水平,也使我国色布出口提高了竞争力,且与国外系统比,价格低廉,非常适合国情
制造厂家常用生产金字塔pp(productivity pyramid)结构来描述它的产品能提供的功能。如图1所示为美国a-b公司和德国siemens公司的生产金字塔。尽管这些生产金字塔结构层数不同,各层功能有所差异,但它们都表明plc及其网络在工厂自动化系统中,由上到下,在各层都发挥着作用。这些金字塔的共同特点是:上层负责生产管理,下层负责现场控制与检测,中间层负责生产过程的监控及优化。
图1生产金字塔结构示意图
美国国家标准局曾为工厂系统提出过一个如图2所示的nbs模型,它分为6级,并规定了每一级应当实现的功能,这一模型获得了国际广泛的承认。
图2 nbs模型
化组织(iso)对企业自动化系统的建模进行了一系列研究,也提出了一个如图3所示的6级模型。尽管它与nbs模型各级内涵,特别是高层内涵有所差别,但两者在本质上是相同的,这说明现代工业企业自动化系统应当是一个既负责企业管理经营又负责控制监控的综合自动化系统。它的高3级负责经营管理,低3级负责生产控制与过程监控。

图3 iso企业自动化模型
通过执行_setdpslaveaddress程序可以实现simotion的dp从站地址修改。
实现方法:
(1)首先打开hw config 硬件组态,配置接口为dp从站:

图01. 设置dp 接口为从站
(2)配置dp从站通信的io地址如下图:
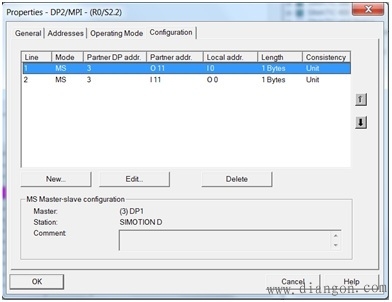
图02. 配置dp从站通信的io地址
(3)查询dp 诊断地址用于后续编程时填写参数使用:

图03. 查询该接口的诊断地址
(4)编写如下程序
var_bbbbbb
locdpslaveaddress : sint := 8; // 需要使用的profibus地址
retdpslaveaddress : structretdpslaveaddress; // 返回值变量
locretval : dint;
neededsetdpaddress : dint := 0;
startchange :bool;
end_var
end_interface
implementation
program bkgchangdpaddress
if startchange then
// 读取当前的dp从站地址
retdpslaveaddress := _getactivedpslaveaddress (
logicaladdresscommunicationadapter := 16382 // 步骤3查询的接口诊断地址
);
if (0 = retdpslaveaddress.functionresult) then
// 检查是否需要更新dp地址,如果当前地址与地址locdpslaveaddress 不相同,则执行更新
if (retdpslaveaddress.dpslaveaddress <>; locdpslaveaddress) then
neededsetdpaddress := 1;
else
;
end_if;
end_if;
if (1 = neededsetdpaddress) then
// 设置新的dp地址
locretval := _setdpslaveaddress (
logicaladdresscommunicationadapter := 16382, // 步骤3查询的接口诊断地址
dpslaveaddress := locdpslaveaddress
// profibus address of the local slot
);
if (0 = locretval) then
locretval := _activatedpslaveaddress (
);
else
;
end_if;
end_if;
end_if;
(5)修改startchange为1,程序执行成功会导致simotion重新启动,随后新的dp地址生效。
