

6ES7231-7PC22-0XA0优质产品
PLC主要有整体式和模块式两种结构型式。
整体式PLC的每一个I/O点的平均价格比模块式的便宜,且体积相对较小,一般用于系统工艺过程较为固定的小型控制系统中;而模块式PLC的功能扩展灵活方便,在I/O点数、输入点数与输出点数的比例、I/O模块的种类等方面选择余地大,且维修方便,一般于较复杂的控制系统。
二、安装方式的选择
PLC系统的安装方式分为集中式、远程I/O式以及多台PLC联网的分布式。
集中式不需要设置驱动远程I/O硬件,系统反应快、成本低;远程I/O式适用于大型系统,系统的装置分布范围很广,远程I/O可以分散安装在现场装置附近,连线短,但需要增设驱动器和远程I/O电源;多台PLC联网的分布式适用于多台设备分别独立控制,又要相互联系的场合,可以选用小型PLC,但必须要附加通讯模块。
三、相应的功能要求
一般小型(低档)PLC具有逻辑运算、定时、计数等功能,对于只需要开关量控制的设备都可满足。
对于以开关量控制为主,带少量模拟量控制的系统,可选用能带A/D和D/A转换单元,具有加减算术运算、数据传送功能的增强型低档PLC。对于控制较复杂,要求实现PID运算 、闭环控制、通信联网等功能,可视控制规模大小及复杂程度,选用中档或高挡PLC。但是中、高挡PLC价格较贵,一般用于大规模过程控制和集散控制系统等场合。
四、响应速度要求
PLC是为工业自动化设计的通用控制器,不同档次PLC的响应速度一般都能满足其应用范围内的需要。如果要跨范围使用PLC,或者某些功能或信号有特殊的速度要求时,则应该慎重考虑PLC的响应速度,可选用具有高速I/O处理功能的PLC,或选用具有快速响应模块和中断输入模块的PLC等。
五、系统可靠性的要求闽侯县西门子6ES7522-1BH10-0AA0
对于一般系统PLC的可靠性均能满足。对可靠性要求很高的系统,应考虑是否采用冗余系统或热备用系统。
六、机型尽量统一
一个企业,应尽量做到PLC的机型统一。主要考虑到以下三方面问题:
1)机型统一,其模块可互为备用,便于备品备件的采购和管理。
2)机型统一,其功能和使用方法类似,有利于技术力量的培训和技术水平的提高。
3)机型统一,其外部设备通用,资源可共享,易于联网通信,配上位计算机后易于形成一个多级分布式控制系统
1.1 6SE70中的实现方法与常用连接器
根据《6SE70使用大全V3.4使用大全》功能图125,参数P734.01~P734.16为变频器发送给DP主站的16个PZD字的参数化接口。P734.01默认值为K0032,代表通过*个PZD将状态字1发送的DP主站。同理若要求用第3个PZD将变频器输出电流值传给DP主站,则 P734.03 = K0022(Output Amps);这样在DP主站侧所接收的第3个PZD的数值就是变频器输出电流。如图1.1所示,可以通过参数r735.01到.16来从变频器侧读数所发送的数值。
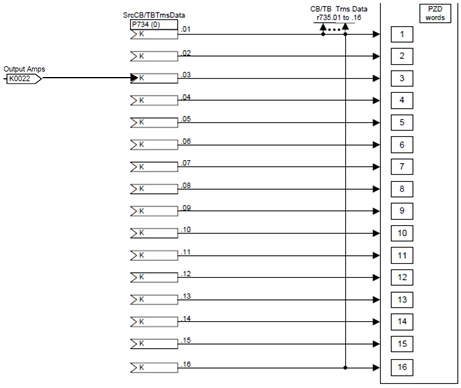
图1.1 6SE70过程数据PZD参数化接口
常用连接器号:
KK0020 实际速度
K0023 输出电压
K0025 直流母线电压
K0030 控制字1
K0031 控制字2
K0032 状态字1
K0033 状态字2
(更多内容请参考《6SE70使用大全V3.4使用大全》连接器表)
1.2 6RA70中的实现方法与常用连接器
根据《 6RA70 系列V3.1全数字直流调速装置中文说明书》功能图Z110,参数U734.01~U734.16为调速器发送给DP主站的16个PZD字的参数化接口。如图1.2:默认的U734.01=K0032(状态字1),U734.02=K0167(实际转速),U734.04=K0033(状态字2),若想要用第5个PZD将调速器器输出实际电枢电压值传给DP主站,则 U734.05 = K0291;这样在DP主站侧所接收的第5个PZD的值就是实际电枢电压值。
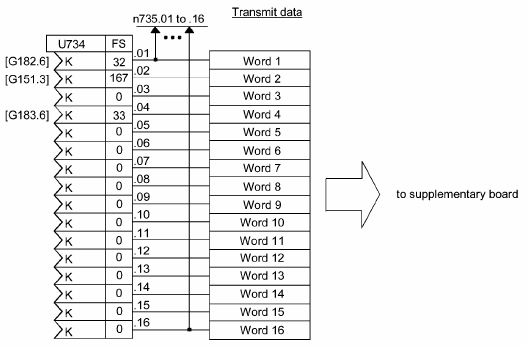
图1.2 6RA70 过程数据PZD参数化接口
常用连接器号:
K0107 6 个电流波头的平均值
K0118 电枢电流给定值
K0265 励磁电流调节器输入的实际值
K0030 控制字1
K0031 控制字2
K0032 状态字1
K0033 状态字2
(更多内容请参考《 6RA70 系列V3.1全数字直流调速装置中文说明书》连接器表)
2注意事项:
23、使用的软件
? STEP7 V5.4 SP2
? SCOUT V4.1 SP1 或 STARTER V4.1 SP1
? S120 V2.5 SP1 HF1
? CBE20的 GSD V2.1文件:gsdml-v2.1-siemens-sinamics-s-cu3x0-20070726.xml
4、IP 地址及通讯名称:
Device Communication nameIP addressCPU319-3 PN/DP PN-IO192.168.0.108CU320 CU310192.168.0.109PG192.168.0.112
注意:所有节点的子网掩码:255.255.255.0。
三、项目配置
1、 本例使用的设备描述
SERVO_02Motor Module: 6SL3120-2TE13-0AA3Motor: 1FK7022-5AK71-1LG0Absolute EncoderSERVO_03Motor Module: 6SL3120-2TE13-0AA3Motor: 1FK7022-5AK71-1AG0Sin/Cos Encoder
图 10.
注意:S120支持两个周期性通讯接口IF1和IF2,分别通过CU参数P8839.0和P8839.1来定义IF1和IF2的通讯方式,在默认情况下P8839.0= P8839.1=99,就激活了这两个接口的自动模式,如下表所示:

在这种方式下无法实现PROFIBUS DP和PROFINET IO的并行通讯,因此为了实现其并行通讯,需要按如下方式设置:
? P8839[0]=1和P8839[1]=2:PROFIBUS DP 用于同步,PROFINET IO用于周期性通讯
? P8839[0]=2和P8839[1]=1:PROFINET IO用于同步,PROFIBUS DP用于周期性通讯(本例中的设置)

两个周期性通讯接口IF1和IF2的特性如上表所示:
注意:IF2不支持TM41,TM15,TM17,TM/TB,CU与CPU之间的通讯。
鄂州西门子代理商
五、通过PROFIBUS DP或PROFINET IO总线来实现过程数据的传输
S7-300/400PLC通过PROFINET IO或PROFIBUS DP周期性通讯方式将控制字1(CTW1)和主设定值(NSETP_B)发送至驱动器。
(1) 控制字中Bit0做电机的起、停控制。
(2) 主设定值为速度设定值,参数P2000中的值为频率设定值和实际值的参考频率, 对应4000H(十六进制),发送的高频率(大值)为7FFFH(200%)。
(3) 当组态的报文结构 PZD=2或自由报文999时,在S7-300/400 中可用“MOVE" 指令进行数据传送;当组态的报文结构PZD >2,在S7-300/400 中需调用SFC14和SFC15系统功能块。
? SFC14(“DPRD_DAT")用于读驱动装置的过程数据。
? SFC15(“DPWR_DAT")用于将过程数据写入驱动装置。
例子(PROFINET IO):SERVO_02 控制字、主设定值的发送及状态字、实际频率的读取程序见图11。

图11
通过读取Servo_02的参数r2050和P2051可以判断数据是否传输成功。

图12
例子(PROFIBUS DP):SERVO_02 "控制字、主设定值的发送及状态字、实际频率的读取程序见图13。

图13
通过读取Servo_02的参数r8850和P8051可以判断数据是否传输成功。

图14
注意通过通讯接口IF1和IF2可以同时实现CPU与Servo_02的数据传输
六、驱动器参数的读取及写入
1.扩展PROFIDRIVE功能(DPV1)
非周期性数据传送模式允许:
? 交换大量的用户数据
? 用DPV1的功能 READ 和 WRITE可以实现非周期性数据交换。传输数据块的内容应遵照 PROFIdrive参数通道(DPV1)数据集DS47(非周期参数通道结构)。
2. 参数请求及参数应答的结构
参数请求包括三部分:请求标题、参数地址及参数值。

表1.参数请求格式

表2.参数应答格式
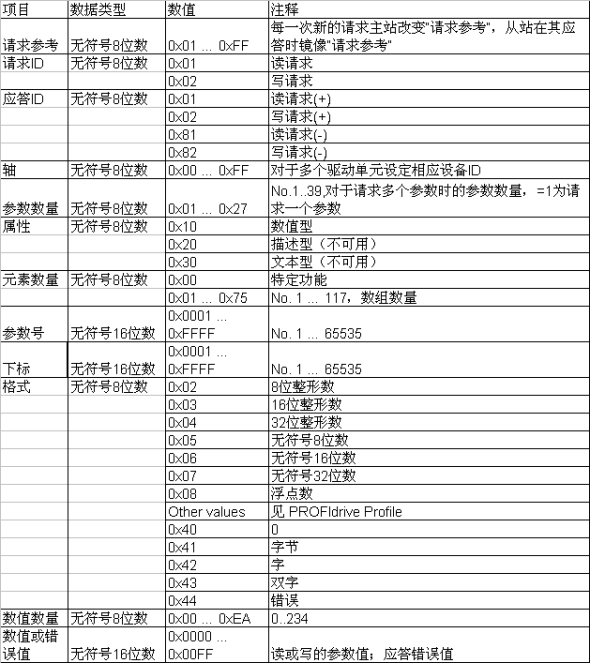
表3.参数请求及应答描述
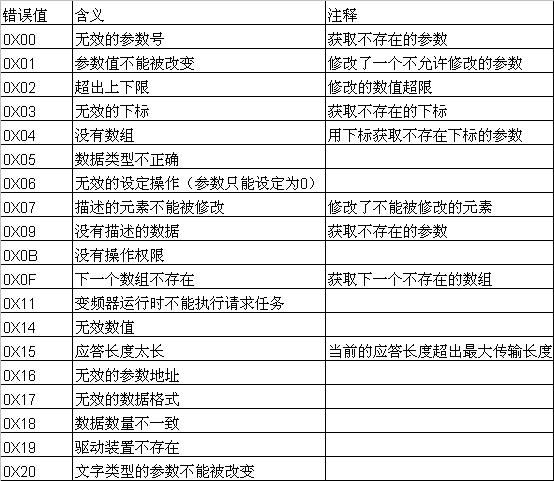
表4.在DPV1参数应答中的错误值描述
3. S7-300/400PLC通过PROFINET IO非周期性通讯方式读取驱动器参数。
请注意:PLC读取驱动器参数时必须使用两个功能块SFB52 / SFB53
举例如下:
(1) 使用标志位M0.0及功能块SFB53将读请求(数据集RECORD DB11)(图16)发送至驱动器。
将M0.0设定为数值1启动读请求,当读请求完成后必须将该请求置0,结束该请求。ERROR = 1: 表示执行此功能块时有错误产生,而STATUS 指示功能块执行状态或错误信息 。
(2) 使用标志位M1.0及功能块SFB52读取参数的请求响应(响应块DB22)(参见图17) 。
将M1.0设定为数值1读取参数请求响应,完成后必须将该位置0,结束该请求。ERROR = 1: 表示执行此功能块时有错误产生,而STATUS 指示功能块执行状态或错误信息 。

图15 PROFINET IO读参数请求

图16 PROFINET IO读参数响应

图17 PROFINET IO读参数变量表
4. S7-300/400PLC通过PROFINET IO非周期性通讯方式修改驱动器参数P1216。
举例如下:
PLC写参数时只需使用SFB53,在本项目的Network 2中发送写请求DB33 (参见图19) 到驱动器; PLC读“写参数"响应时需使用SFB52,在本项目中读取驱动器返回的参数值数据块为DB22 (参见图20) 。
(1) 将M0.2设定为数值1启动写请求,当写请求完成后必须将该请求置0,结束该请求。ERROR = 1: 表示执行此功能块时有错误产生,而STATUS 指示功能块执行状态或错误信息 。
(2) 将M1.0设定为数值1读请求,完成后必须将该请求置0,结束该请求。ERROR = 1: 表示执行此功能块时有错误产生,而STATUS 指示功能块执行状态或错误信息
