

西门子模块6GK7243-1GX00-0XE0千万库存
西门子调试
S7-200CN、S7-200Smart、S7-300、S7-400、S7-1200、S7-1500、V20、V90、G120、G120C、S120。
上半年,公路建设完成投36469亿元,同比长10.2%。4.钢丝绳芯胶带输送机高的强度,能够实现单机长距离运输,使运输简化,运输效率高,设备成本及运输成本远远低于一般织物芯体胶带的输送机。 二、安装调心托辊组 调心托辊组有多种类型如中间转轴式、四连氖健⒘⒐跏降龋一般在皮带运输机总长度较短时或皮带运输机双向运行时采用此比较合理,原因是较短皮带运输机更容易跑偏并且不容易。 3、物料输送中,能耗低,大限度的运行成本。
3. 通过通信网络将块发送到 CPU 进
行 PLC 编译。
通信错误
要下载(编辑器至 PLC)或上载(PLC
至编辑器),PLC 通信必须正常运行。确
保网络硬件和 PLC 连接电缆正常操作。
4. PLC 编译
如果 PLC 编译成功,程序控制移
交至下一步;如果失败,退出下
载并报错。
PLC 编译器会验证 PLC 硬件支持全部程
序指令、范围和结构。
在 PLC 菜单的“信息"(Information) 区域
中,单击 PLC 按钮查看找到的个编
译错误
5. 程序位于 CPU 存储器中,随
时可在 RUN 模式下执行。
致命错误 (页 975)和非致命运行错误
(页 972)可从 PLC 菜单的“信
息"(Information) 区域访问。
如果下载尝试生成编译器错误或下载错误,则更正错误,然后重新尝试下载。
另请参见
上传项目组件 (页 94)
PLC 概念
4.3 保存和恢复数据
S7-200 SMART
94 系统手册, V2.5, 01/2020, A5E03822234-AI
参见
硬件故障排除指南 (页 727)
4.3.2 上传项目组件
要将项目组件从 PLC 上传到 STEP 7-Micro/WIN SMART 程序编辑器,请按以下步骤操
作:
1. 确保网络硬件和 PLC 连接器电缆(以太网 (页 33)或 RS485 (页 36))运行正常,并确
保 PLC 通信运行正常 (页 727)。
2. 要上传所有项目组件,在“文件"(File) 或 PLC 菜单功能区的“传输"(Transfer) 部分单击
“上传"(Upload) 按钮,或按快捷键组合 CTRL+U。
3. 要上传所选项目组件,单击“上传"(Upload) 按钮下的向下箭头,然后选择具体要上传的
项目组件(程序块、数据块或系统块)。
4. 如果弹出“通信"(Communications) 对话框,请选择要上传的 PLC 通信接口和以太网 IP
地址或 RS485 网络地址。
5. 在“上传"(Upload) 对话框中,可改选要上传的块(如果已选择)。
6. (可选)如果想要对话框在成功上传后自动关闭,单击“成功后关闭对话框"(Close
dialog on success) 复选框。
7. 单击“上传"(Upload) 按钮以开始上传。
STEP 7-Micro/WIN SMART 复制您选择从 PLC 上传到当前打开项目的完整程序或程序组
件。状态图标指示信息性消息,或上传时是否出现潜在问题或错误。状态消息提供操作的
特定结果。
PLC 概念
4.3 保存和恢复数据
S7-200 SMART
系统手册, V2.5, 01/2020, A5E03822234-AI 95
如果上传成功,可保存上传的程序,或进行进一步更改。PLC 不包含符号或状态图表信
息;因此无法上传符号表或状态图表。
说明 明
上传到新项目是捕获程序块、系统块和/或数据块信息的保险方法。由于项目空白,您不
会意外损坏数据。如果要使用位于另一项目的状态图表或符号表中的信息,可始终打开第
二个 STEP 7-Micro/WIN SMART 实例,然后将该信息从另一项目文件复制过来
西门子S7-200SMART模块CPUST40
下载程序时,CPU 会对程序进行编译。如果 CPU 检测到程序违反编译规则,将中止
下载,并生成一个错误代码。(已经下载到 CPU 的程序仍然存在于存储器中,不
会丢失。)可以在修正错误后再次下载程序。
I/O 设备错误 上电和下载系统块后,CPU 验证系统块中存储的 I/O 组态与 CPU、信号板和实际存在
的扩展模块是否匹配。任何不匹配将导致生成设备的组态错误。在运行时,设备检测
到的其他 I/O 问题(如缺少用户电源或输入值超出限制)可生成 I/O 错误。
CPU 将模块状态信息存储在特殊存储器 (SM) 位中。程序可以监视和评估这些位。
SM5.0 是全局 I/O 错误位,当存在任何 I/O 错误条件时,它将保持置位。
程序执行错误 程序在执行过程中可能产生错误。这些错误的原因可能是指令使用不正确或指令处理
的数据无效。例如,如果程序执行期间更改了指针,则程序编译时有效的间接地址指
针可能会指向非法地址。更改指针指向无效地址为运行时间编程问题的一个示例。发
生运行时编程故障时,CPU 会将 SM4.3 置位。SM4.3 会在 CPU 处于 RUN 模式期间
一直保持置位。
程序可通过执行 GET_ERROR 指令 (页 370)获取当前非致命错误代码并将 SM4.3 复
位为 OFF。有关违反编译规则和运行时编程问题的描述,请参见非致命错误代码列表 (页 972)。
有关用于报告 I/O 和程序执行错误的 SM 位的详细信息,请参见 SM 位 (页 979)的描述。
5.7.6 致命错误
致命错误导致 PLC 停止执行程序。 根据致命错误的严重程度的不同,致命错误可能导致
PLC 无法执行任一或全部功能。处理致命错误的目的是使 PLC 进入安全状态,这样 PLC
能对现有错误条件的询问做出响应。
检测到致命错误时,PLC 将切换到 STOP 模式、点亮 STOP 和 ERROR LED、覆盖输出
表并切断输出。 PLC 一直处于该状态,直到致命错误条件得到纠正。
在进行更改以纠正致命错误条件后,使用下列方法之一重新启动 PLC:
● 关闭 PLC 的电源后再重新接通。
● 使用 STEP 7-Micro/WIN SMART,在 PLC 菜单功能区的“修改"(Modify) 区域单击“暖
启动"(Warm Start) 按钮。 这会强制 PLC 重新启动并清除所有致命错误。
重新启动 PLC 将清除致命错误条件并执行上电诊断测试以验证致命错误是否已纠正。 如
果发现其它致命错误条件,则 PLC 将再次点亮 ERROR LED,指示仍然存在错误。 否
则,PLC 将开始正常运行。
有些错误条件可能会导致 PLC 无法进行通信。 在这些情况下,无法查看 PLC 中的错误
代码。 这些类型的错误表明硬件发生故障,需要修理 PLC;更改程序或清空 PLC 存储器
无法解决这些问题。
系统手册, V2.5, 01/2020, A5E03822234-AI
概述
借助“在 RUN 模式下执行程序编辑"功能,无需将 PLC 切换为 STOP 模式即可对程序进
行修改,并将相关变更下载至 PLC。
● 无需停机即可对当前程序进行细微修改。
示例:更改参数值。
● 借助此功能,可更快速地执行程序调试。
示例:对常开或常闭开关进行取反逻辑操作。
如果将相关更改下载至实际过程(相对仿真过程而言,程序调试期间可能会进行模拟仿
真),下载之前,请务必全面考虑可能会对机器和机器操作员造成的安全后果。
在 RUN 模式下执行程序编辑的过程中,只能下载程序块(OB1,子例程和中断)。在
RUN 模式下执行程序编辑的过程中,无法下载系统块或数据块。
在 在 RUN 模式下执行编辑的前 提条件
若要在 RUN 模式下将程序编辑下载至 PLC,必须满足以下前提条件:
● 程序编译必须成功。
● 运行 STEP 7-Micro/WIN SMART 的计算机与 PLC 之间必须已成功建立通信。
● 目标 PLC 的固件必须支持在 RUN 模式下进行程序编辑。仅带有 V2.0 版或更新版固
件的 S7-200 SMART CPU 支持在 RUN 模式下进行程序编辑。
● 必须为受保护的 POU 提供密码才能打开块(用于正常编辑、在 RUN 模式编辑和程序
状态操作)。
如果在 RUN 模式下执行程序编辑的过程中将 PLC 切换为 STOP 模式,则 PLC 将中止编
辑会话。
可能发生的问题
为了帮助您确定是在 RUN 模式还是在 STOP 模式下将程序相关变更下载至 PLC,需考
量在 RUN 模式下执行编辑时各种类型的程序变更所产生的影响:
● 如果删除输出的控制逻辑,则在下次重新上电或切换为 STOP 模式之前,输出将始终
保持为其的状态。
● 如果删除在 RUN 模式下执行编辑时已运行的 HSC、Motion、或 PLS 函数,则
HSC、Motion、或 PLS 函数将继续运行,直至下一次上电循环或切换到 STOP 模
式。
编程概念
5.8 在 RUN 模式下执行程序编辑
S7-200 SMART
系统手册, V2.5, 01/2020, A5E03822234-AI 141
● 如果在 RUN 模式下执行编辑的过程中删除 ATCH 或 DTCH 指令却未删除相应中断例
程,则在下次重新上电或切换为 STOP 模式之前,无论何时只要发生控制事件,仍会
继续执行中断例程。
● 如果添加以*扫描标志为条件的 ATCH 指令,则在下次重新上电或发生 STOP-to-
RUN 模式转换之前,CPU 不会使能相关事件。
● 如果删除 ENI 或 DISI 指令,则在下次重新上电或发生 RUN-STOP 模式转换之前,激
活的中断例程仍将继续运行。
● 如果在 RUN 模式下执行编辑的过程中修改 RCV 指令表的地址,且 RCV 指令处于激
活状态,则 PLC 会将接收到的数据写入旧的表地址中。完成当前(旧地址)接收请求
之后,PLC 才会使用。由于已完成程序编辑,如果程序在中查找数据,
会发现其中不存在数据。GET 与 PUT 指令的功能类似。
说明
CPU 型号 CPU CR20s、CPU CR30s、CPU CR40s 和 CPU CR60s 无以太网端口,
不支持与使用以太网通信相关的所有功能。
● 在重新上电或从 STOP 转换为 RUN 模式之前,PLC 不会执行以*扫描标志为条件
的相关逻辑。完成 RUN 模式下的编辑之后,启动修改后的程序不会设置*扫描标
志。
处理正负跳变
在 RUN 模式下执行编辑的过程中,为大程度减小程序中正跳变 (EU) 和负跳变 (ED) 指
令再定位的相关变更对过程的影响,STEP 7-Micro/WIN SMART 会为程序中所含的每条
跳变指令分配一个临时的编号。对于在 RUN 模式编辑过程中添加到程序中的各跳变指
令,必须为其分配的标识号。为帮助用户选择尚未使用的编号,STEP 7-Micro/WIN
SMART 的交叉引用窗口中提供了边沿使用选项卡,当激活在 RUN 模式下激活程序编辑
功能后,该选项卡即可用。该表会列出当前程序中所使用的所有 EU/ED 指令,这样用户
即可参照此列表执行程序变
热继电器主要用于电动机的过载保护,使用中应当考虑电动机的工作环境、起动情况、负载性质等因素,主要有以下几个方面:①热继电器用于保护长时工作制的电动机
a、按电动机的起动时间来选择热继电器
热继电器在电动机起动电流为6In时的返回时间tf与动作时间td之间有如下关系:tp=(0.5~0.7)×td,这个公式中,tf为热继电器动作后的返回时间,单位为s;td为热继电器的动作时间,单位为s。
按电动机的起动电流为6In时具有三路热元件的热继电器动作特性见表1
表1 动机的起动电流为6In时具有三路热元件的热继电器动作特性
整定电流 动作时间 工作条件
1.0In 不动作 冷态
1.2In <20min 热态
1.5In <30min 热态
1.5In 返回时间tf≥3s 冷态
1.5In 返回时间tf≥5s 冷态
1.5In 返回时间tf≥8s 冷态
表1的环境条件是:海拔不大于1000m,环境温度为40℃。
b、按电动机额定电流来选择热继电器及整定热继电器保护参数一般地,热继电器的整定电流可按公式IFR=(1.05~1.1)In来选择,公式中,IFR为热继电器整定值;In为电动机额定电流。
例如30kW的电动机,已知它的额定电流是56A,则热继电器的整定电流按公式计算,则IFR=(1.05~1.1)×In=(1.05~1.1)×56≈58.8A~61.6A,故取热继电器的规格为63A。
对于过载能力比较差的电动机,通常按电动机额定电流的60%-80%来选择热继电器的额定电流。
c、按断相保护要求来选择热继电器
对于星形联结的电动机,建议采用三极的热继电器;对于三角形联结的电动机,应当采用带断相保护装置的热继电器,即脱扣级别为20或者30。
具有断相保护的热继电器其动作特性见表2

表2 断相保护的热继电器其动作特性
注:热继电器的复位时间不大于5min,手动复位时间不大于2min;电流调节范围:66%~。
当电动机出现断相时,电动机各绕组的电流、流过热继电器的电流及热继电器保护状况见表3
表3 动机出现断相时各绕组的电流、流过热继电器的电流及热继电器保护状况
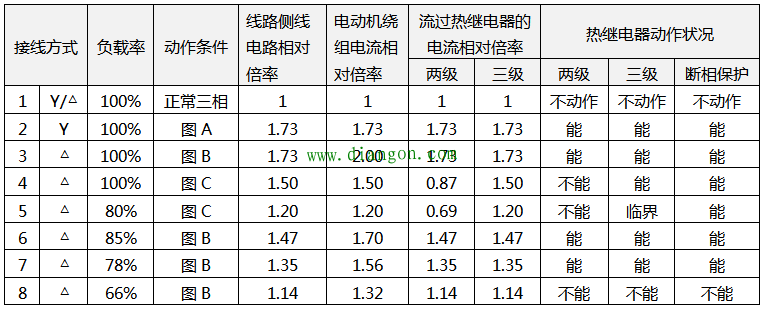

图A
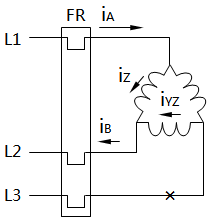
图B
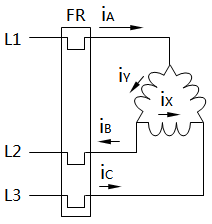
图C
②热继电器用于保护重复短时工作制的电动机
对于重复短时工作制的电动机,例如起重电机,由于电动机不断重复起动使得温升加剧,热继电器双金属片的温升跟不上电动机绕组的温升,则电动机将得不到可靠的过载保护,电动机的过载保护不宜选用双金属片热继电器,而应当选用过电流继电器或能反映出绕组实际温度的温度继电器来实施保护。
③选择用于重载起动电动机保护的热继电器
当电动机起动惯性矩较大时,例如用于风机、卷扬机、空压机和球磨机等设备的电动机,其起动时间较长,一般在5s以上,甚至可达1min。为了使热继电器在电动机起动期间不动作,可采用以下电动机重载起动的热继电器配套方法。
a、配套方法一:
热继电器经过饱和电流互感器接入(说明:电动机重载起动时间一般在20~30s,长可达40s)。
b、配套方法二:起动时利用接触器将热继电器热元件接线端子短接,正常运行时再断开接触器(说明:用于长时间的起动,需要配套时间继电器,可用于反复起动过程。电动机起动时热继电器无法进行过载保护)。
c、配套方法三:热继电器经过电流互感器接入,起动时间用中间继电器将继电器热元件接线端子短接,正常运行时再断开中间继电器(说明:用于长时间的起动,需要配套时间继电器,可用于反复起动过程。电动机起动时热继电器无法进行过载保护)。
d、采用脱扣级别为30的热继电器(说明:用于长时间的起动,需要配套时间继电器,可用于反复起动过程。电动机起动时热继电器无法进行过载保护)。
注:配套方法二和配套方法三可用普通热继电器和普通电流互感器。
双金属片热继电器主要由主双金属片、热元件、复位按钮、动作机构、触点系统、电路调节旋钮、复位机构和温度补偿元件等构成。当电动机正常运行时,热元件产生的热虽然能使主双金属片弯曲,但是弯曲产生的推动力不足以使热继电器的触点动作。当电动机过载时,双金属片的弯曲位移加大,推动导板使常闭触点断开,通过控制电路使得交流接触器断电分闸从而切断电动机的工作电源,由此保护了电动机。
我们来看图1。
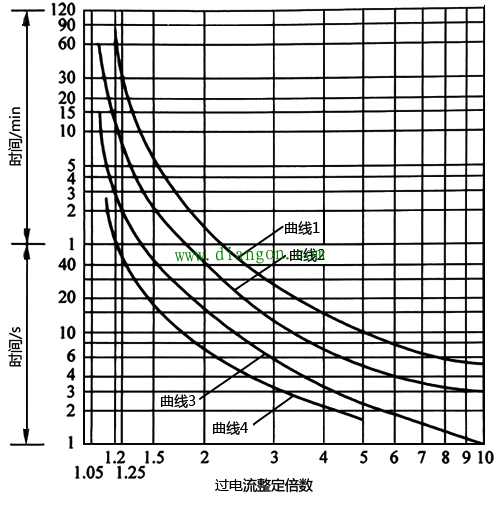
图1 继电器过载反时限动作特征
线1为三相笼型异步电动机容许的过载反时限动作特性;曲线2为热继电器的冷态过载反时限动作特性;曲线3为热继电器的热态过载反时限动作特性;曲线4为热继电器的断相保护特性曲线。
可以看出,使用热继电器对三相笼型异步电动机进行过载保护时,必须与交流接触器配合使用,热继电器的过载保护曲线2和3不能与电动机容许的过载反时限曲线1有交点。
