

西门子6ES7212-1BB23-0XB8功能介绍
西门子PLC程序中常用的几个指令介绍
1、串联电路块的并联连接指令OLD
两个或两个以上的接点串联连接的电路叫串联电路块。串联电路块并联连接时,分支开始用LD、LDN指令,分支结束用OLD指令。OLD指令与后述的ALD指令均为无目标元件指令,而两条无目标元件指令的步长都为一个程序步。OLD有时也简称或块指令。
2、并联电路的串联连接指令ALD
两个或两个以上接点并联电路称为并联电路块,分支电路并联电路块与前面电路串联连接时,使用ALD指令。分支的起点用LD、LDN指令,并联电路结束后,使用ALD指令与前面电路串联。ALD指令也简称与块指令,ALD也是无操作目标元件,是一个程序步指令。
3、输出指令 =
1、= 输出指令是将继电器、定时器、计数器等的线圈与梯形图右边的母线直接连接,线圈的右边不允许有触点,在编程中,触点以重复使用,且类型和数量不受限制。
4、置位与复位指令S、R
S为置位指令,使动作保持;R为复位指令,使操作保持复位。从的位置开始的N个点的寄存器都被置位或复位,N=1~255如果被复位的是定时器位或计数器位,将清除定时器或计数器的当前值。
5、跳变触点EU,ED
正跳变触点检测到一次正跳变(触点的入信号由0到1)时,或负跳变触点检测到一次负跳变(触点的入信号由1到0)时,触点接通到一个扫描周期.正/负跳变的符号为EU和ED,他们没有操作数,触点符号中间的"P"和"N"分别表示正跳变和负跳变
6、空操作指令NOP
NOP指令是一条无动作、无目标元件的一个序步指令。空操作指令使该步序为空操作。用NOP指令可替代已写入指令,可以改变电路。在程序中加入NOP指令,在改动或追加程序时可以减少步序号的改变。
7、程序结束指令END
END是一条无目标元件的一序步指令。PLC反复进行输入处理、程序运算、输出处理,在程序的zui后写入END指令,表示程序结束,直接进行输出处理。在程序调试过程中,可以按段插入END指令,可以按顺序扩大对各程序段动作的检查。采用END指令将程序划分为若干段,在确认处于前面电路块的动作正确无误之后,依次删去END指令。要注意的是在执行END指令时,也刷新监视时钟。
自动升降电梯自动化控制系统的组成
自动升降电梯的工作状态分为自动状态和维修工作状态,这两种工作状态互相独立、彼此分开,目的在于确保控制回路的输出的*性,避免发生类似双线圈输出的情况,杜绝事故的发生。
整个升降电梯自动化控制系统的组成由核心控制元件PLC、空气开关、电机马达开关、交流接触器、触摸屏、开关、按钮、指示灯、报警器和外部光电传感器等元部件组成。其中由面板旋钮开关或带锁的钥匙旋钮开关选择整个系统的工作状态,通过状态安全继电器的得电或失电来区分自动运行和手动运行的输出电源的通和断。这样就使得系统只有在自动运行状态下时PLC的输出端子才有输出电压,当系统在手动运行状态下时,PLC输出端子上无输出电压。马达开关作用为当系统指令电机以工频方式工作时,起到保护电机的作用。人机界面能够方便操作人员对设备进行操作和监控,同时实时显示设备工作状态,记录生产产量和班产批次等历史数据。报警灯由多级柱装灯塔组成,不同颜色代表不同意义。设备外部设有多个光电传感器,向PLC传输外部状态信号,指示自动电梯的工作状态。自动化控制系统中的安全部分的紧急停止按钮拥有zui高的设备输出中止权,即无论在手动还是自动状态下,只要紧停按钮被按下,设备都会立即停止任何动作。电梯井除了在高处和低处安装了感应电梯吊篮位置的光电传感器,还在井架极限高位和极限低位安装了机械式的行程限位开关,确保电梯轿箱不发生冲顶和撞底的事故。在1楼电梯进口输送带和2楼电梯出口输送带上分别安装有1个光电传感器,用来检测运输的产品。在轿箱吊篮内输送带上安装有2个光电传感器,用来检测运输产品的进出情况。
由于生产线的情况决定了在自动升降电梯的自动化控制系统中需要设立主控制柜,和现场分控制箱。在主控制柜内安装所有空,马达开关,PLC,触摸屏,塔式报警灯等元气件,在现场分控制箱上安装自动状态系统停止旋钮开关。手动检修操作盒采用移动式手持盒,所有手动按钮相互连锁,并且都为点动按钮
西门子CPU模块6ES7515-2TM01-0AB0参数详细
编写SFC51程序:
CALL "RDSYSST"
REQ :=TRUE
SZL_ID :=W#16#294 //读取从站是否存在
INDEX :=W#16#1
RET_VAL :=MW0
BUSY :=M2.0
SZL_HEADER:=#length
DR :=P#DB1.DBX0.0 BYTE 500 //结果输出到DB1数据块中
在本例中,P#DB1.DBX0.0 BYTE 500中为每个DP从站(16 x 8 = 128)保留一位,地址为Address 1的DP从站的状态保存在第三个字节的Bit 1位中, 地址为Address 3的DP从站的状态保存在第三个字节的Bit 3位中,依次类推。如果从站对应的位未被置位,则表明那个DP从站没有通信上或不存在。
举例:从DB1.DBW2开始,每个位对应一个bit,例如3号站对应的位是DB1.DBX2.3 ,站点存在的位为1,不存在的为0。
注意事项:
关于系统功能SFC51的更多详情请参阅STEP 7的在线帮助,或者通过Start > SIMATIC > documentATION选择手册“System Software for S7-300/400 System and Standard Functions"
4读取CPU的序列号
4.1 编程
说明:
通过 SFC 51“RDSYSST"可以从系统状态列表(SSL)中读取下列标识数据:
下面的表格指明了可以从不同型号和固件版本的 CPU 读取其它哪些标识数据。为此使用 SFC 51 和 SSL ID W#16#011C。
表3 INDEX说明
索引名称S7-300/C7S7-400W#16#0001自动化系统的名称从固件版本 V2.2 起支持W#16#0002CPU 的名称从固件版本 V2.2 起支持W#16#0003CPU 的设备 ID从固件版本 V2.2 起支持W#16#0004版权条目从固件版本 V2.2 起支持W#16#0005CPU 的序列号从固件版本 V2.2 起从 MLFB6ES741x-xxx04-0AB0 起W#16#0006为操作系统保留--W#16#0007CPU 型号名称-支持W#16#0008MMC 或 MC 的序列号 (参见条目号:19215608)从固件版本 V2.0 起-(CPU317:从 V2.1 开始)需要注意,老CPU升级到上表版本也无法实现此功能。
首先需要创建一个数据块,用来存放读取出来的状态结果
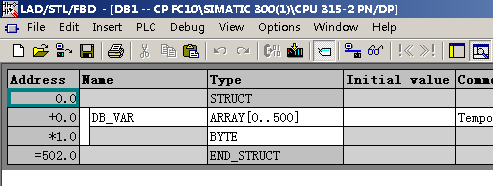
图7 创建DB1,存放读取结果
打开OB1,首先在OB1的临时变量区创建一个变量length,类型设置为Struct(结构)
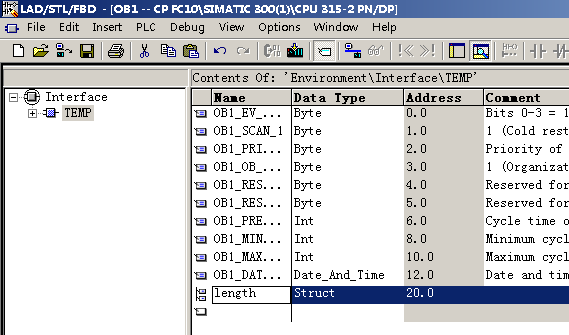
图8 创建名为length的结构变量
双击length变量,进入结构变量成员定义,创建两个word类型的变量,本例中分别为size和number:
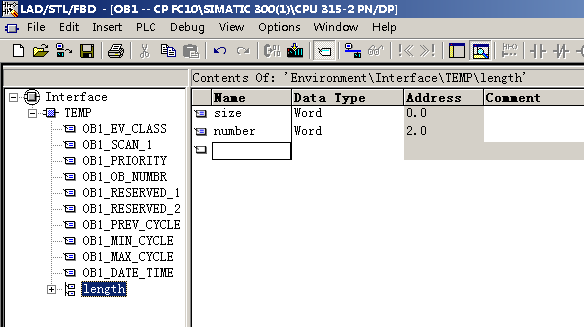
图9 创建length的结构变量的两个word成员
发信系统
离散报警和模拟量报警(限值报警)
具有可自由定义的消息级别(如状态/故障消息),用于定义确认响应和显示消息事件
利用消息历史数据进行状态和故障消息管理
与组态的消息屏幕、消息窗口和消息行
归档消息和过程值(在 CF/SD/多媒体存储卡/USB 闪盘上,或通过以太网在网络驱动器上归档)
各种归档类型:循环归档和序列归档
按照标准的 WINOOWs 格式 (CSV) 对归档数据进行分类
利用趋势曲线在线评估过程值归档
可以使用标准工具(MS Excel、MS Access)进行外部分析
报警记录和值班记录
打印功能(参见“*打印机")
语言更改
32 种在线语言,32 种组态语言,包括亚洲和西里尔字母字符集。
配方管理
带有附加数据存储器(在 SD/多媒体存储卡/USB 闪盘等上面)
在面板上进行在线 / 离线处理
以标准的 WINOOWs 格式保存配方数据 (CSV)
可利用标准工具(MS Excel、MS Access)进行外部处理
编程器功能 STATUS/FORCE VAR 与 SIMATIC S7 相结合
诊断显示与 SIMATIC S7 相结合可支持快速问题排查
PLC 的屏幕选择允许从 PLC 进行操作员控制
通过 MS Internet Explorer 显示 HTML 文档
VB 脚本,通过执行一些新功能,其中包括与变量接口(比较运算,环通等),从而具备良好的灵活性
过程画面、报警和变量的帮助文本
算术函数
限值监视用于输入和输出的可靠过程控制
组态
可使用工程软件 SIMATIC WinCC Comfort (TIA Portal) 进行组态。
配置数字量输出通道
①“对CPU STOP 模式的响应":设置数字量输出对CPU 从运行状态切换到 STOP 状态的响应,可以设置为保留zui后的有效值或者使用替代值;
②“通道地址":输出通道的地址,首地址在“I/O地址"项中设置;
③“从RUN 模式切换到 STOP 模式时,替代值1":如果在数字量输出设置中,选择“使用替代值",则此处可以勾选,表示从运行切换到停止状态后,输出使用“替代值1",如果不勾选表示输出使用“替代值0"。如果选择了“保持上一个值"则此处为灰色不能勾选。
“I/O 地址":数字量地址设置如图 5 所示。

图5 数字量输入输出地址设置
“输入地址":
①“起始地址":模块输入的起始地址;
②“结束地址":系统根据起始地址和模块的IO数量自动计算并生成结束地址;
③“组织块":可将过程映像区关联到一个组织块,当启用该组织块时,系统将自动更新所分配的过程映像分区;
④“过程映像":选择过程映像分区。
“自动更新":在每个程序循环内自动更新I/O过程映像(默认)。
“无":无过程映像,只能通过立即指令对此I/O进行读写。
“PIP x":可以关联到③中所选的组织块。同一个映像分区只能关联一个组织块,一个组织块只能更新一个映像分区。系统在执行分配的OB时更新此PIP。如果未分配OB,则不更新PIP。
“PIP OB伺服":为了对控制进行优化,将运动控制使用的所有I/O模块(如,工艺模块,硬限位开关)均给过程映像分区“OB 伺服 PIP"。这样I/O模块即可与工艺对象同时处理。
• "输出地址":设置与输入类似。
 注意: 所有输入输出的地址都在过程映像区之内,如果没有选择组织块和分区,默认情况下过程映像区是自动更新。
注意: 所有输入输出的地址都在过程映像区之内,如果没有选择组织块和分区,默认情况下过程映像区是自动更新。
"硬件标识符":用于寻址硬件对象,常用于诊断,也可以在系统常量中查询。
模拟量“常规":单击模拟量输入/输出的“常规"选项可以输入项目信息:
“名称":定义更改组件的名称
“注释":说明模块或设备的用途
“模拟量输入":组态如图 6 所示。

图6 模拟量输入组态
①“积分时间":通过设置积分时间可以抑制频率的干扰;
②“通道地址":首地址在模拟量的“I/O地址"中设置;
③“测量类型":本体上的模拟量输入只能测量电压信号,所以选项为灰,不可设置;
④“电压范围":测量的电压信号范围为固定的0~10V;
⑤“滤波":模拟值滤波可用于减缓测量值变化,提供稳定的模拟信号。模块通过设置滤波等级(无、弱、中、强)计算模拟量平均值来实现平滑化。
⑥“启用溢出诊断":如果激活“启用溢出诊断",则发生溢出时会生成诊断事件。
"模拟量输出":组态如图 7 所示。

西门子CPU模块6ES7511-1TK01-0AB0参数详细
什么是西门子变频器?
西门子变频器是利用电力半导体器件的通断作用将工频电源变换为另一频率的电能控制装置。
2、为什么西门子变频器的电压与电流成比例的改变?
异步电动机的转矩是电机的磁通与转子内流过电流之间相互作用而产生的,在额定频率下,如果电压一定而只降低频率,那么磁通就过大,磁回路饱和,严重时将烧毁 电机。因此,频率与电压要成比例地改变,即改变频率的同时控制西门子变频器输出电压,使电动机的磁通保持一定,避免弱磁和磁饱和现象的产生。这种控制方式多用于 风机、泵类节能型西门子变频器。
3、西门子变频器制动的有关问题
制动的概念:指电能从电机侧流到西门子变频器侧(或供电电源侧),这时电机的转速高于同步转速,负载的能量分为动能和势能. 动能(由速度和重量确定其大小)随着物体的运动而累积。当动能减为零时,该事物就处在停止状态。机械抱闸装置的方法是用制动装置把物体动能转换为摩擦和能消耗掉。对于西门子变频器,如果输出频率降低,电机转速将跟随频率同样降低。这时会产生制动过程. 由制动产生的功率将返回到西门子变频器侧。这些功率可以用电阻发热消耗。在用于提升类负载,在下降时, 能量(势能)也要返回到西门子变频器(或电源)侧,进行制动.这种操作方法被称作“再生制动",而该方法可应用于西门子变频器制动。在减速期间,产生的功率如果不通过热消耗的方法消耗掉,而是把能量返回送到西门子变频器电源侧的方法叫做“功率返回再生方法"。在实际中,这种应用需要“能量回馈单元"选件。
USS 报文帧格式
USS 协议的报文简洁可靠,高效灵活。报文由一连串的字符组成,协议中定义了它们的特定功能:
STXLGEADR净数据区BCC1.2.3....n以上每小格代表一个字符(字节)。其中:
STX: 起始字符,总是 02 h
LGE: 报文长度
ADR:从站地址及报文类型
BCC: BCC 校验符
在 ADR 和 BCC 之间的数据字节,称为 USS 的净数据。主站和从站交换的数据都包括在每条报文的净数据区域内。
净数据区由 PKW 区和 PZD 区组成:
PKW 区PZD 区PKEINDPWE1PWE2...PWEmPZD1PZD2...PZDn以上每小格代表一个字(两个字节)。
PKW: 此区域用于读写参数值、参数定义或参数描述文本,并可修改和报告参数的改变 。其中:
PKE: 参数 ID。包括代表主站指令和从站响应的信息,以及参数号等
IND: 参数索引,主要用于与 PKE 配合定位参数
PWEm:参数值数据
PZD: 此区域用于在主站和从站之间传递控制和过程数据。控制参数按设定好的固定格式在主、从站之间对应往返。如:
PZD1:主站发给从站的控制字/从站返回主站的状态字
PZD2: 主站发给从站的给定/从站返回主站的实际反馈
PZDn: ……
根据传输的数据类型和驱动装置的不同,PKW 和 PZD 区的数据长度都不是固定的,它们可以灵活改变以适应具体的需要。但是,在用于与控制器通信的自动控制任务时,网络上的所有节点都要按相同的设定工作,并且在整个工作过程中不能随意改变。
 注意:
注意:
对于不同的驱动装置和工作模式,PKW 和 PZD 的长度可以按一定规律定义。 一旦确定就不能在运行中随意改变
PKW 可以访问所有对 USS 通信开放的参数;而 PZD 仅能访问特定的控制和过程数据
PKW 在许多驱动装置中是作为后台任务处理,因此 PZD 的实时性要比 PKW 好
 以上仅是对 USS 协议的简单介绍,以帮助读者更好地理解控制任务和选择对策。如需要了解详细的信息,请参考相应驱动产品的手册。
以上仅是对 USS 协议的简单介绍,以帮助读者更好地理解控制任务和选择对策。如需要了解详细的信息,请参考相应驱动产品的手册。
USS 的复杂性和 S7-200 作为主站的对策
USS 通信的复杂性体现在它在不同的应用场合不是固定不变的。这是因为:
USS 经过*的发展,存在一些子集和变种
驱动装置可能不支持 USS 通信协议中的部分功能
不同的驱动装置的参数定义可能有很大区别
这些原因导致一个实用的 USS 主站必须针对不同的驱动装置做出改动。使用 USS 调试驱动装置的软件就要做到这一点。这就给在 S7-200 上做一个通用的 USS 程序带来了实质的困难。
 一个驱动产品,只要它支持 USS 通信,S7-200 就可以通过自由口编程对其控制。通过其手册能够了解它支持 USS 通信的特点,从而编出适合的程序。这种任务往往比较复杂而且耗费时间。西门子为解决这一问题,针对应用比较广泛,产品线比较相配的驱动产品,开发了 S7-200 的 USS 指令库。
一个驱动产品,只要它支持 USS 通信,S7-200 就可以通过自由口编程对其控制。通过其手册能够了解它支持 USS 通信的特点,从而编出适合的程序。这种任务往往比较复杂而且耗费时间。西门子为解决这一问题,针对应用比较广泛,产品线比较相配的驱动产品,开发了 S7-200 的 USS 指令库。
S7-200 的 USS 指令库
S7-200 的 USS 指令库zui初是针对 MicroMaster 3 系列产品的,经过一段时间的发展,现在以及能够*支持 MicroMaster 3 系列和 MicroMaster 4 (MM4)系列产品,以及 SINAMICS G110 系列产品;目前此 USS 指令库还能对 MasterDrive 等产品提供有限的支持,这些产品包括 6SE70/6RA70 等。
本章中将用 MM440 变频器与 S7-200 之间的 USS 通信为例。
S7-200 通过 USS 指令库控制变频器 S7-200 与西门子驱动装置的连接形式
