

6ES7341-1AH02-0AE0技术参数
Q0.0 Q0.1 控制字节说明
?SM67.0 ?SM77.0 ?PTO/PWM更新周期值 0=不更新,1=更新周期值
?SM67.1 ?SM77.1 ?PWM更新脉冲宽度值 0=不更新,1=脉冲宽度值
?SM67.2 ?SM77.2 ?PTO更新脉冲数 0=不更新,1=更新脉冲数
?SM67.3 ?SM77.3 ?PTO/PWM时间基准选择 0=1微秒值,1=1毫秒值
?SM67.4 ?SM77.4 ?PWM更新方法 0=异步更新,1=同步更新
?SM67.5 ?SM77.5 ?PTO操作 0=单段操作,1=多段操作
?SM67.6 ?SM77.6 ?PTO/PWM模式选择 0=选择PTO,1=选择PWM
?SM67.7 ?SM77.7 ?PTO/PWM允许 0=禁止PTO/PWM,1=允许
??这样根据以上表格,我们得出Q0.0控制字:SMB67为:10000101
采用PTO输出,微妙级周期,发脉冲的周期(也就是频率)与脉冲个数都要重新输入。10000101转化为??16进制?为85,有了控制字以后,我们来写这一段程序:

根据上面这段程序,我们知道了控制字的使用,同时也知道步进电机的脉冲周期与冲个数的存放位置(对??Q0.0来说是SMW68与SMD72)。当然,VW100与VD102内的数据不同的话,步进电机的转速和转动圈数就不一样。
???还有一点需要说明得是:M0.0导通---PLC捕捉到上升沿发动脉冲输出后,想停止的话,只须改变端口脉冲的?控制字,再启动PLS即可,程序如下:

2.高速计数功能。
???西门子S7-200系列PLC具有高速计数的功能;举一例子来谈谈高速计数的用途,我们采用普通电机来带动丝杆转动,我们想控制转动距离,怎么来解决这个问题?那么我们可在电机另一头与一编码器联接,电机转一圈,编码器也随之转一圈,同时根据规格发出不同的脉冲数。当然,这些脉冲数的频率比较高,PLC不能用普通的上升沿计数来取得这些脉冲,只能通过高速计数功能了。
???启动高速计数功能,也要具有控制字
HSCO HSC1 描述
?SM37.0 ?SM47.0 ?复位有效电平控制位 0=高电平有效, 1=低电平有效
?SM37.1 ?SM47.1 ?启动有效电平控制位于 0=高电平有效, 1=低电平有效
?SM37.2 ?SM47.2 ?正交计数器速率选择 0=4X计数率, 1=1X计数率
?SM37.3 ?SM47.3 ?计数方向控制位 0=减计数, 1=正计数
?SM37.4 ?SM47.4 ?向HSC中写入计数方向 0=不更新, 1=更新计数方向
?SM37.5 ?SM47.5 ?向HSC中写入预置值 0=不更新, 1=更新预置值
?SM37.6 ?SM47.6 ?向HSC中写入当前值 0=不更新, 1=更新当前值
?SM37.7 ?SM47.7 ?HSC允许 0=禁止HSC, 1=允许HSC
??参照上面的表格,我们选择HSC1高速计数器,控制字为SMB47,现在我们启动高速计数器HSC1,选择为增计数,更新计数方向,重新设置值,更新当前值:这样的话,HSC1的启动控制高为:11111000转化为16进制为?F8,将启动计数器时当前值存放在SMD48中,将预存置放在SMD52中,具体的程序?如下:

同样的,如果计数器在工作状态下想停止计数器,也必须改变它的控制字后,启动HSC具体程序?如下:

3. PID回路控制功能。
??西门子S7-200系列PLC的PID控制相当的简单,可以通过micro/win软件的一个向导程序,按照提示,一步一步执行您所要求PID控制的属性即可,在这里谈一谈PID这三个参数的具体意义:P为增益项,P越大,响应起就快,在调节流量阀时:设定流量为50%,当目前流量接近50%,刚超过,如果P值很大的话,那么流量阀会马上会关闭,而不会控制在某一区域。这就是增益项太大引起。在调节的过程中应该先将P值调节比较适当了,再去调节I值,它为积分项,是在控制器回路中控制对当前值与设定值相等的偏差范围。D为微分项,主要作用是避免给定值的微分作用而引起的跳变。
??在现场的PID参数的调整过程中,针对西门子S7-200型PLC我的建议是在不同的控制阶段,采用不同的PID参数组,具体而言就是当目前距离设定值差距较大时,采用P值较大的一套PID参数,如果当前值快接近设定值范围时,采用P值较小的一套PID参数
西门子电机6SL3120-2TE15-0AD0
200V V90驱动器与低惯量系列1FL6带报闸电机之间的连接
200V V90驱动器内部没有集成抱闸继电器,需订购第三方的继电器用做抱闸
继电器。200V V90驱动器与高惯量系列1FL6带报闸电机之间的连接如图2-3所示。

图2-3 200V V90驱动器与1FL6带报闸电机之间的连接
抱闸继电器的24V控制电压由外部提供,V90驱动器设定值电缆(50针插头) 中第
23脚(Brake)连接第三方继电器(抱闸继电器),控制其打开和关闭。连接示例如图
2-4所示。

图2-4 200V低惯量系列V90抱闸接线
说明:
1) 隔离的数字输出电源。当使用DC24V电源时,它可以是控制器的供电电源。
2)电机抱闸不仅可以由SINAMICS V90 伺服驱动输出的抱闸控制信号控制,也可以由外部急停控制。
3)不能使用同一个电源给抱闸(DC24V)和抱闸控制信号(P24V)供电。
4)按图示安装浪涌吸收器可以抑制因继电器(RY)的接通/关闭操作产生的浪涌电压。当使用二极管时,需要注意制动器从释放到动作的时间比使用浪涌吸收器稍慢。
DO信号MBR指示抱闸的工作状态,如图2-4所示。

图2-4 抱闸状态指示
说明:MBR 仅为状态信号,因为电机停机抱闸的控制与供电均通过特定的端子实现
1. 什么是功能表图 |
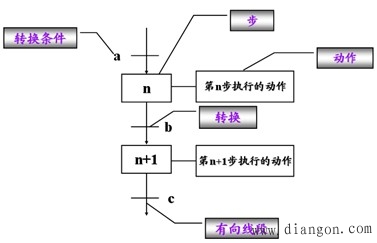 |
“步”是控制系统中的一个相对不变的性质,它对应于一个稳定的状态。在功能流程图中步通常表示某个执行元件的状态变化。“步”用矩形框表示,框中的数字是该“步”的编号,编号可以该“步”对应的工步序号,也可以是与该“步”相对应的编程元件。 |
 |
“活动步”:当系统正处于某一步时,该步处于活动状态,称该步为“活动步”。步处于活动时,相应的动作被执行。 |
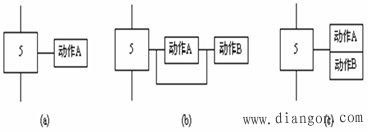 |
“保持型动作”:所谓“保持型动作”,即则该步不活动时继续执行该动作。 |
“转换”:转换是用有向连线上与有向连线垂直的短划线来表示,转换将相邻两步分隔开。步的活动状态的进展是由转换的实现来完成的,并与控制过程的发展相对应。 |
3. 功能表图的使用规则 |
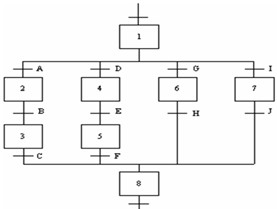
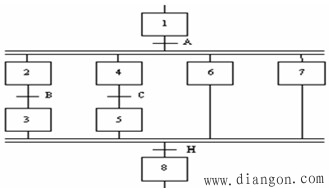
4. 功能表图的结构形式 |
 |
选择性分支 |
 |
并行序列 |
 |
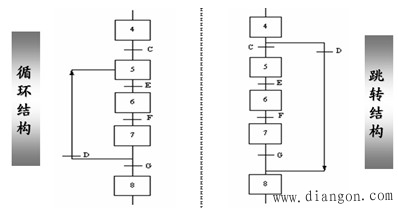
循环和跳转结构 |
 |
子步 :某一步可以包含一系列“子步”和“转换”,通常这些序列表示整个系统的一个完整的子功能。 |
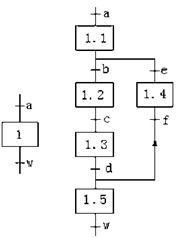 |
