西门子6ES7511-1FK02-0AB0现货供应
用户程序是随PLC的控制对象而定的,由用户根据对象生产工艺的控制要求而编制的应用程序。为了便于读出、检查和修改,用户程序一般存于CMOS静态RAM中,用锂电池作为后备电源,以保证掉电时不会丢失信息。为了防止对RAM中程序的破坏,当用户程序经过运行正常,不需要改变,可将其固化在只读存储器EPROM中。现在有许多PLC直接采用EEPROM作为用户存储器。
工作数据是PLC运行过程中经常变化、经常存取的一些数据。存放在RAM中,以适应随机存取的要求。在PLC的工作数据存储器中,设有存放输入输出继电器、辅助继电器、定时器、计数器等逻辑器件的存储区,这些器件的状态都是由用户程序的初始设置和运行情况而确定的。根据需要,部分数据在掉电时用后备电池维持其现有的状态,这部分在掉电时可保存数据的存储区域称为保持数据区。
由于系统程序及工作数据与用户无直接联系,所以在PLC 产品样本或使用手册中所列存储器的形式及容量是指用户程序存储器。当PLC提供的用户存储器容量不够用,许多PLC还提供有存储器扩展功能。
3、输入/输出单元
输入/输出单元通常也称I/O单元或I/O模块,是PLC与工业生产现场之间的连接部件。 PLC通过输入接口可以检测被控对象的各种数据,以这些数据作为PLC对被控制对象进行控制的依据;同时PLC又通过输出接口将处理结果送给被控制对象,以实现控制目的。
由于外部输入设备和输出设备所需的信号电平是多种多样的,而PLC内部CPU的处理的信息只能是标准电平,所以I/O接口要实现这种转换。I/O接口一般都具有光电隔离和滤波功能,以提高PLC的抗能力。另外,I/O接口上通常还有状态指示,工作状况直观,便于维护。
PLC提供了多种操作电平和驱动能力的I/O接口,有各种各样功能的I/O接口供用户选用。I/O接口的主要类型有:数字量(开关量)输入、数字量(开关量)输出、模拟量输入、模拟量输出等。
常用的开关量输入接口按其使用的电源不同有三种类型:直流输入接口、交流输入接口和交/直流输入接口。
常用的开关量输出接口按输出开关器件不同有三种类型:是继电器输出、晶体管输出和双向晶闸管输出。继电器输出接口可驱动交流或直流负载,但其响应时间长,动作频率低;而晶体管输出和双向晶闸管输出接口的响应速度快,动作频率高,但前者只能用于驱动直流负载,后者只能用于交流负载。
PLC的I/O接口所能接受的输入信号个数和输出信号个数称为PLC输入/ 输出(I/O)点数。I/O点数是选择PLC的重要依据之一。当系统的I/O点数不够时,可通过PLC的I/O扩展接口对系统进行扩展。
4、通信接口
PLC配有各种通信接口,这些通信接口一般都带有通信处理器。PLC通过这些通信接口可与监视器、打印机、其它PLC、计算机等设备实现通信。PLC与打印机连接,可将过程信息、系统参数等输出打印;与监视器连接,可将控制过程图像显示出来;与其它PLC连接,可组成多机系统或连成网络,实现更大规模控制。 与计算机连接,可组成多级分布式控制系统,实现控制与管理相结合。
远程I/O系统也必须配备相应的通信接口模块。
5、智能接口模块
智能接口模块是一独立的计算机系统,它有自己的CPU、系统程序、存储器以及与PLC系统总线相连的接口。它作为PLC系统的一个模块,通过总线与PLC相连,进行数据交换,并在PLC的协调管理下独立地进行工作。
PLC的智能接口模块种类很多,如:高速计数模块、闭环控制模块、运动控制模块、中断控制模块等。
6、编程装置
编程装置的作用是编辑、调试、输入用户程序,也可在线监控PLC内部状态和参数,与PLC进行人机对话。它是开发、应用、维护PLC*的工具。编程装置可以是编程器,也可以是配有编程软件包的通用计算机系统。编程器是由PLC厂家生产,该厂家生产的某些PLC产品使用,它主要由键盘、显示器和外存储器接插口等部件组成。编程器有简易编程器和智能编程器两类。
简易型编程器只能联机编程,而且不能直接输入和编辑梯形图程序,需将梯形图程序转化为指令表程序才能输入。简易编程器体积小、价格便宜,它可以直接插在PLC的编程插座上,或者用电缆与PLC相连,以方便编程和调试。有些简易编程器带有存储盒,可用来储存用户程序,如三菱的FX-20P-E简易编程器。
智能编程器又称图形编程器,本质上它是一台便携式计算机,如三菱的GP-80FX-E智能型编程器。它既可联机编程,又可脱机编程。可直接输入和编辑梯形图程序,使用更加直观、方便,但价格较高,操作也比较复杂。大多数智能编程器带有磁盘驱动器,提供录音机接口和打印机接口
4. 代表定义的是网络读(NETR)或网络写(NETW)操作时,定义读取或写入的数据应该存在本地PLC的哪个地址区,并且将被写入和被读取的数据定义在远程PLC中的哪个地址区,有效的操作数为VB、IB、QB、MB、LB;
因为之前已定义了两项网络读/写操作,所以在“下一项操作"中可以配置另外一条网络读/写操作指令,配置内容与上述界面类似,就不再重复介绍。在个操作中定义为网络读操作,地址分配如图7所示;下一项操作中将定义为网络写(NETW)操作,具体的地址分配如图8中所示的内容。
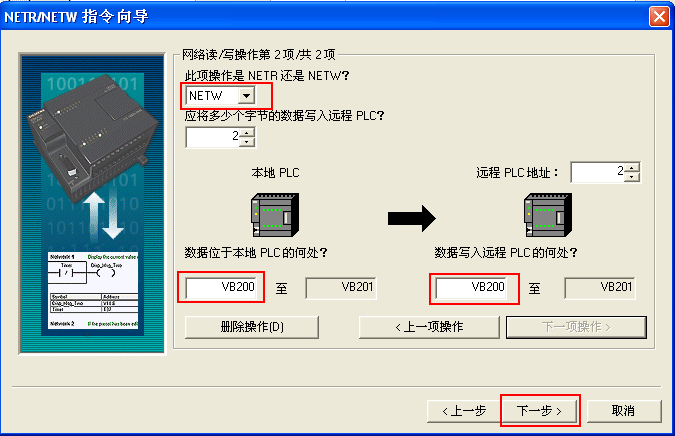
图8 网络写操作的配置画面
后需要分配V存储区的建议地址,建议将V存储区起始地址设置的大一些(如图9所示),原则是避免和程序中已经应用到的V存储区地址有重叠。
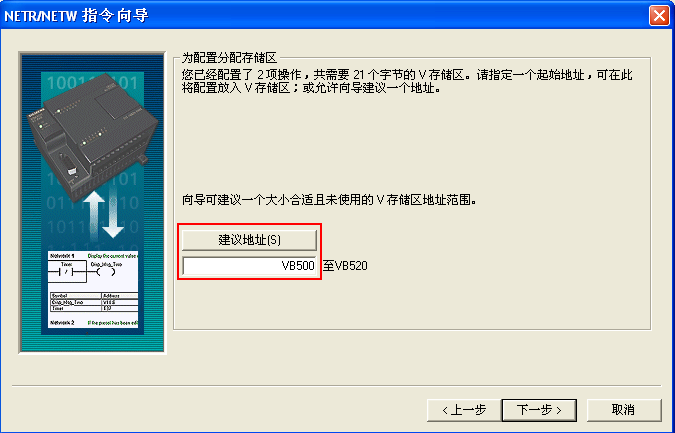
图9 建议地址区分配
完成了上述步骤,即完成了向导的配置过程。在向导配置完成后,会自动生成网络读写指令的子程序及符号表。
2.3 NETR/NETW程序块编程
完成向导配置后,进入程序块编程。编程的内容就是对向导生成的子程序进行调用,后将程序下载到相应的PLC中,使之生效,如图10所示。
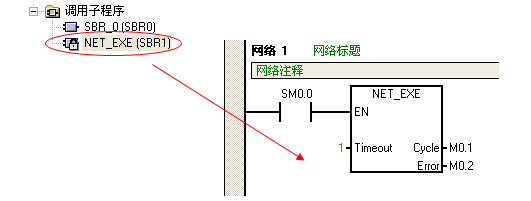
图10 调用向导生成的子程序模块
其中:
1) 必须用SM0.0来使能NETR/NETW,以保证该指令的正常运行;
2) Timeout:超时参数。0=不延时;1-32767=表示以秒为单位的超时延时时间。如果通信有问题的时间超出此延时时间,则报错误;
3) Cycle:周期参数。此参数在每次所有网络读写操作完成时切换其开关量状态;
4) Error:错误参数。0=无错误,1=有错误
在plc的信号输入中,我们通常会用到PNP或是NPN这两种输出类型的感应开关,这两者的区别在于输出信号类型都不一样的,如图所示:
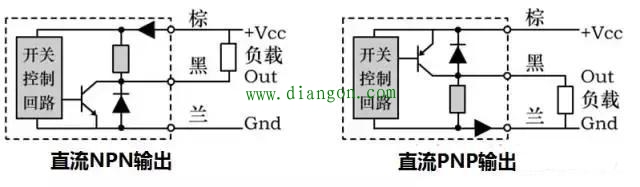
对于NPN型输出的传感器,当有信号输出时,则信号输出线(黑色)与电源负极线(蓝色)导通,所以输出信号为低电平,根据电路原理,当NPN型传感器的输出信号接入到PLC的输入点时,则另一端公共端M必须接高电平(即电源24V端),所以当一个NPN型的传感器接入到PLC的输入端时,PLC输入端接法应使用源型接法。
对于PNP型输出的传感器,当有信号输出时,则信号输出线(黑色)与电源正极线(棕色)导通,所以输出为高电平,则接入到PLC的输入信号端时,公共端M就必须要要接低电平(即电源的0V),所以此时应接为漏型接法。
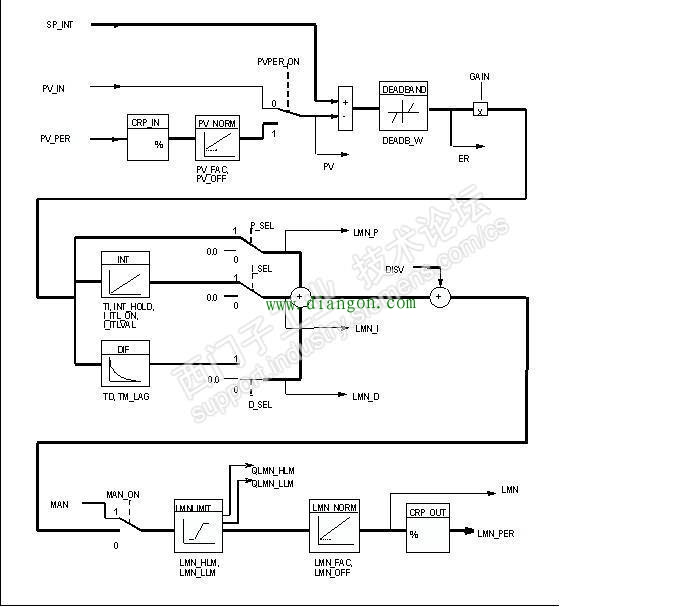
| 在刚接触PID时候感觉很头疼,FB41功能块繁多的输入输出以及帮助里面非常的解释看得我眼冒金星,头昏眼花,真的是不知道如何入手,后来使用几次以后发现,原来只是填填变量的事(我们的PID就是简单的控制,还没有涉及切换、加泵以及减泵等复杂问题),正好近有时间,就汇总了一下FB41的端子说明(基本来自大家技术论坛的分享),就当做个笔记吧。 1、FB41的方框图(FB41的端口作用逻辑图,看懂这个基本就都会了)
|