西门子模块6ES7315-6FF04-0AB0性能参数
概述ET 200MP 故障安全模块对 ET 200SP/S7-1500 产品系列加以扩展。与 ET 200SP/ET 200S/ET 200M/ET 200iSP/ET 200pro 和 S7-1200 一样,它们可无缝集成到 Safety Integrated 解决方案中。也支持通过 PROFIsafe 进行安全通信。数字量输入和输出(DI 和 DQ)的故障安全型模块的尺寸与 35 mm 宽的标准模块相同。根据 IEC 61508 对它们的安全功能进行了认证。它们在安全相关应用中,安全等级可达 SIL 3(根据 IEC 62061)和 PL e(根据 ISO 13849)。
SIMATIC ET 200MP 的 F 模块的一个特殊功能是,F 地址不是使用模块上的 DIP 开关手动设置的。地址现在是通过工程组态系统在调试期间分配的。更换模块时,存储在电子编码元件中的 F 地址保留在前连接器中。插入新模块后,模块会自动从该编码元件接收 F 地址。因此,无需重新分配 F 地址。这种新功能简化了设置过程,节省了时间。
全集成自动化 (TIA)安全技术 (Safety Integrated) 是全集成自动化的一个组件,它将安全自动化与标准自动化进行全面集成。
在标准自动化(传统 PLC)和安全自动化(机电技术)仍处于分离状态的,这两种自动化正不断融合,成为一种统一而全面的集成系统。西门子是自动化技术的全面供应商,在这种自动化技术中,安全工程已成为标准自动化的组成部分,并实现了系统范围内的集成。
集成安全功能有关功能安全性的信息(也适用于 ET 200MP):
那么该如何避免这种情况呢?
大家是否还记得刚刚介绍局部变量参数类型时除了IN, OUT类型外,还有一种类型叫IN_OUT,这种类型的参数是先读入,然后再写出,这里我们就可以利用它的特点解决上面的问题。
下面对子程序的参数进行修改,将原先的#CC变量类型改为IN_OUT。如下图所示:
图.05
主程序结构不变,如下所示,可以看到由于#CC的类型是IN-OUT,它在子程序块的接口位置也转到了左侧输入侧。
图.06
下面再次将I0.0置1,其他输入都为0,监控程序状态,如图.07所示,可以看到只有Q0.0为1,Q0.1状态为0。而如果将I0.1置1, Q0.0被复位,Q0.1还是0,这样就符合客户的控制要求了。
图.07
同样,如果只给I0.2置1,那么也只有Q0.1会亮,不会再影响Q0.0。
了解了IN_OUT类型变量的特点,就不难分析以上的结果。因为每次调用子程序时,局部变量#CC都会先去读取输入参数Q0.0或Q0.1的状态,所以即使两次调用子程序时,#CC变量使用的同一区域,该区域的值也会在开始被Q点的状态所修改,就不存在两次调用相互影响的情况了。
另外,如果在子程序一开始就添加一条指令,对局部变量#CC进行赋初值(如图.08),也可以避免临时变量区数值不定的问题,您可以尝试测试下。
图.08
所以,在编写200子程序时要特别注意局部变量的特点,一旦出现多次调用不正常的情况,就可以从局部变量的特点出发分析,看看是不是存在隐患。善加利用IN_OUT变量也许可以解决许多问题
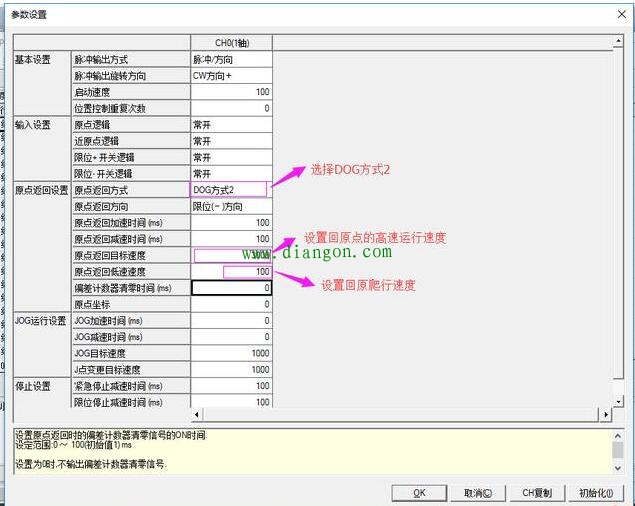
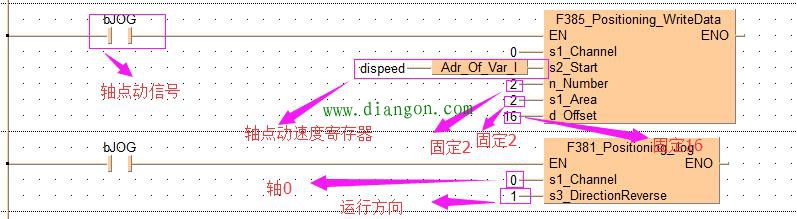
| 我们以控制1轴为例,为大家展示一下回原点,点动,数据表定位控制,轴信息读取,以及轴信息写入吧!首先我们**行轴回原的操作,在轴回原操作之前,我们需要对轴进行以下回原点的设置。
|