西门子6ES7314-6EH04-0AB0现货供应
Modbus具有两种串行传输模式:分别为ASCII和RTU。Modbus是一种单主站的主从通信模式,Modbus网络上只能有一个主站存在,主站在Modbus网络上没有地址,每个从站必须有的地址,从站的地址范围为0 - 247,其中0为广播地址,从站的实际地址范围为1 - 247。
Modbus RTU通信以主从的方式进行数据传输,在传输的过程中Modbus RTU主站是主动方,即主站发送数据请求报文到从站,Modbus RTU从站返回响应报文。
S7-1200以下模块支持 Modbus RTU通信:
| 通信模块/通信板 | 订货号 |
| CM1241 RS232 | 6ES7 241-1AH32-0XB0 |
| CM1241 RS485 | 6ES7 241-1CH30-0XB0 |
| CM1241 RS422/485 | 6ES7 241-1CH32-0XB0 |
| CB 1241 RS485 | 6ES7 241-1CH30-1XB0 |
注意:
1. 使用通信模块CM 1241 RS232作为Modbus RTU主站时,只能与一个从站通讯。
2. 使用通信模块CM 1241 RS485作为Modbus RTU主站时,则允许建立多与 32 个从站的通讯。
3. 使用通信板CB 1241 RS485时,CPU 固件必须为 V2.0 或更高版本,且使用软件必须为STEP 7 Basic V11 或STEP 7 Professional V11 以上更高版本。
随着 TIA PORATL 软件和 S7-1200 CPU 固件的不断更新,S7-1200 Modbus RTU 指令也出现了不同的版本。 用户需要根据使用的软件和硬件,正确选择使用符合要求的 S7-1200 Modbus RTU 指令来实现 Modbus RTU 通信。
软件,硬件要求和指令版本说明如下。
软件 STEP 7 V11 中的 S7-1200 Modbus RTU 指令
软件 STEP 7 V11版本开始,可以从“指令"→“通信处理器"→“MODBUS"下直接调用 “MB_COMM_LOAD"和“MB_MASTER"或“MB_SLAVE"指令,如下图1所示:

图1 Modbus RTU指令
Modbus RTU指令有两个版本:分别为V1 和V2。版本V1初在 STEP 7 Basic V10.5 中提供;版本V2 在 STEP 7 Basic/Professional V11 中提供。
软件 STEP 7 V13 SP1 中的 S7-1200 Modbus RTU 指令
TIA V13 SP1版本软件中提供了2个版本的 Modbus RTU指令。如下图 2 所示:
早期版本的 Modbus RTU 指令(图2. 中 MODBUS (V2.2))仅可通过 CM1241 通信模块或 CB1241 通信板进行 Modbus RTU 通信。
新版本的 Modbus RTU 指令(图2. 中 MODBUS(RTU) V3.0)扩展了 Modbus RTU 的功能,该指令除了支持 CM1241 通信模块、CB1241 通信板,还支持 PROFINET 或 PROFIBUS 分布式 I/O 机架上的 PTP 通信模块实现 Modbus RTU 通信。
注意:新版本 Modbus RTU 指令的使用限制条件
新版本 Modbus RTU 指令通过CM1241通信模块或CB1241通信板进行Modbus RTU通信时,需要满足如下条件:
a. S7-1200 CPU 的固件版本不能低于V4.1;
b. CM1241通信模块 V2.1 以上或 CB1241。
S7-1200 是否支持 Modbus ASCII 通信模式?
西门子不提供支持上述通信模式的的现成指令,需要用户自己用自由口模式编程。
Modbus RTU指令V1和V2两个版本有什么区别?
Modbus RTU指令版本 V2 将参数 “REQ" 和 “DONE" 添加到“MB_COMM_LOAD"指令。而且,“MB_MASTER"和“MB_SLAVE "指令的“MB_ADDR "参数现在允许一个 UInt 值以进行扩展寻址。
同一CPU程序中是否可以同时使用V1和V2两个不同版本的Modbus RTU指令?
不能在同一CPU 程序中同时使用V1(V1.x)和V2(V2.y)指令版本。用户程序的 Modbus 指令必须具有相同的主版本号;主版本组内的各个指令可具有不同的次版本号。
S7-1200 通信模块CM1241是否可作为Modbus RTU主站或作为Modbus RTU从站?
对S7-1200 通信模块CM1241组态并编程调用“MB_COMM_LOAD"指令,可将其设置为Modbus RTU通信模式。通过编程调用“MB_MASTER"指令,S7-1200 通信模块CM1241可作为Modbus RTU主站,或调用“MB_SLAVE"指令,S7-1200 通信模块CM1241可作为Modbus RTU从站。
注意:无论S7-1200 通信模块CM1241作为Modbus RTU主站还是从站,都需要调用“MB_COMM_LOAD"指令进行编程。
S7-1200 CM1241/CB1241 Modbus RTU 通信是否支持两位停止位?
支持。
注意:S7-1200 CM1241/CB1241属性里可以设置停止位, 但是该模块用于 Modbus 通信时,此设置的停止位无效, 需要在 Modbus_Commload 指令的背景 DB 里 Static 修改 STOP_BITS停止位数值为
WinCC V7.2与S7-1200PLC常规通信1.设置PLC通讯参数以及DB块属性设置
2. WinCC添加新驱动
3. 电脑网卡参数设置
4 设置PG/PC接口
5 WinCC 软件设置
新一代的 SIMATIC S7-1500产品概述:
标准型 CPU
• CPU 1511-1 PN:
适用于对程序范围和处理速度具有中等要求的应用,用于通过 PROFINET IO 进行分布式配置。
• CPU 1513-1 PN:
• CPU 1515-2 PN:
适用于在程序范围、网络和处理速度方面具有中等/较高要求的应用,可通过 PROFINET IO 进行分布式配置;可以使用具有单独 IP 地址的附加集成 PROFINET 接口,例如,用于网络分离。
• CPU 1516-3 PN/DP:
适用于对程序范围和处理速度具有较高要求的应用,用于通过 PROFINET IO 和 PROFIBUS DP 进行分布式配置。附加的集成 PROFINET 接口,具有单独的 IP 地址,可用于网络分离等。
• CPU 1517-3 PN/DP:
适用于对程序范围、联网和处理速度具有很高要求的应用,用于通过 PROFINET IO 和 PROFIBUS DP 进行分布式配置。例如,具备独立 IP 地址的附加集成式 PROFINET 接口可用来实现网络隔离。
• CPU 1518-4 PN/DP:
适用于在程序范围和网络方面具有*要求的应用,且满足处理速度方面的*要求。可通过 PROFINET IO 和 PROFIBUS DP 进行分布式配置;可以使用具有单独 IP 地址的两个附加集成 PROFINET 接口,例如,用于网络分离。
故障安全型 CPU
• CPU 1511F-1 PN:
经济实用的入门级 CPU,适用于在分散生产技术中对处理性能和响应速度具有中等要求的标准应用和故障安全应用。
• CPU 1513F-1 PN:
具有中到高容量数据存储器的 CPU,适用于除集中式 I/O 外还包含分布式自动化结构的标准应用和故障安全应用。
• CPU 1515F-2 PN:
适用于对程序范围和处理速度具有中等/较高要求的应用,用于通过带有 PROFIsafe 的 PROFINET IO 实现分布式配置。
• CPU 1516F-3 PN/DP:
适用于对程序范围和处理速度具有中等/较高要求的标准和故障安全应用,用于通过带 PROFIsafe 的 PROFINET IO 和 PROFIBUS DP 实现分布式配置。
• CPU 1517F-3 PN/DP:
适用于对程序范围、联网和处理速度具有很高要求的标准和故障安全应用,用于通过带 PROFIsafe 的 PROFINET IO 和 PROFIBUS DP 进行分布式配置。例如,具备独立 IP 地址的附加集成式 PROFINET 接口可用来实现网络隔离。
• CPU 1518F-4 PN/DP:
适用于对程序范围和处理速度具有较高要求的标准和故障安全应用,用于通过带 PROFIsafe 的 PROFINET IO 和 PROFIBUS DP 实现分布式配置。附加的集成 PROFINET 接口,具有单独的 IP 地址,可用于网络分离等。
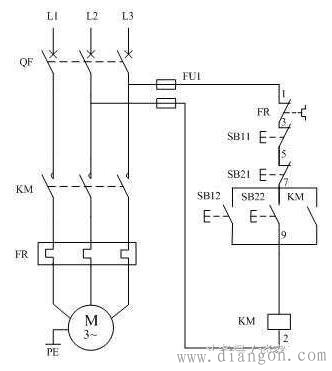
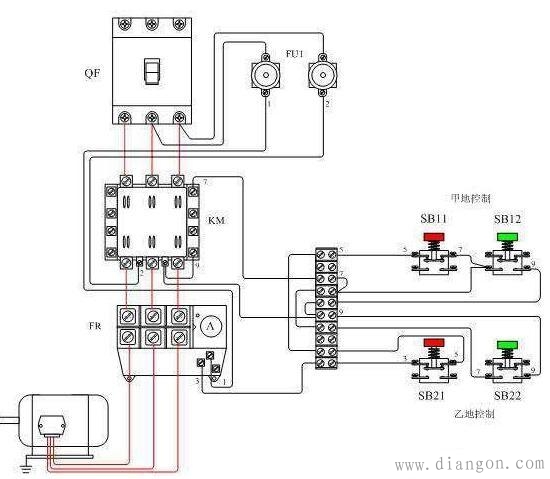
| 电动机异地控制,在学习和实际应用中均有很高的出场率。今天,我们来详细介绍电动机异地控制的接线方法。 首先以两地控制为例,电路图▼ 在该电路中,SB12和SB22是两个启动按钮;SB11和SB21是两个停止按钮。其中,一个停止按钮和一个启动按钮为一组,即四个按钮分居两地A,B,此图可实现在A地和B地同时控制电动机的起停。
|