

西门子6FC5371-0AA10-0AA2详细说明
设计CU310-2控制单元标配有以下接头和接口:现场总线接口CU310?2PN:1个PROFINET接口,带有PROFIdriveV4配置文件的2个端口(RJ45插座)CU310?2DP:1个采用PROFIdriveV4行规的PROFIBUS接口1个用于与DRIVE-CLiQ电机或其它DRIVE-CliQ设备(如编码器单元或端子模块)通信的DRIVE-CLiQ接口1编码器分析功能,用于分析以下编码器信号增量式编码器TTL/HTLSSI编码器,无增量信号1个PE(保护用地线)连接1个电子装置电源接口,通过24VDC电源连接器连接1点温度传感器输入(KTY84?130或PTC)3个可设置参数的故障(可与固件V4.5或更高版本结合使用)数字量输入(隔离)或6个可设置参数的数字量输入(隔离。
除了极为灵活的定位功能,由于其一体化的监控和补偿功能,Epo还具有高度的用户友好性和灵活性。各种不同的操作模式及其功能增强了灵活性和设备生产率,例如,通过“运行中快速"和无扰地校正运动控制。预组态的PROFIdrive定位框可供使用,一旦选择此定位框,其可以自动建立到基本定位器的内部“连接"。Epo基本定位器的功能借助以下基本组件实现闭环位置控制位置实值感测(包括低级别测量探头评估和基准标记搜索)位置控制器(包括限值、适配和预控计算)监控功能(停止、定位和动态跟踪误差监控,和凸轮信号)机械系统反向间隙补偿模数偏移量极限值速度/加速度/延迟/冲击限制软件限位开关(通过位置设定点评估进行行程限制)停止凸轮(使用硬限位开关分析进行移动范围限制)参考或调整设定参考点(对于处于静止的轴)搜索基准(单个模式包括反向能、自动换向、归位至“输出凸轮和编码器零点标号"或只是“编码器零点标号"或“外部零点标号(BERO)")捕捉参考(借助于测量输入分。
CU310?2控制单元需要装有V4.4版或更高版本的固件的CF卡。CU310?2PN控制单元使用PROFINETIO和PROFIdriveV4配置文件与更别的控制系统通信。带有CU310?2PN的SINAMICSS120驱动系统假设PROFINETIO设备的功能,可执行下列功能:PROFINETIO设备100Mbit/s全双工通讯支持实时PROFINETIO:RT(实时)IRT(等时同步实时),*小发随着人力资源的匮乏,非标自动化机械在未来的市场将不断扩大,普及。相应的从事行业内的人才也将有大的需求。设计是理论知识,生产上不要求多美观,实用就好,宗旨是简单,,经济,实用。作为的设计师,对机械方案的评估要有*的判断能。
除驱动对象外,还可在这些控制单元上实现工艺对象。可将这些对象进行分组以形成工艺功能包,并提供扩展的运动控制功能(如同步操作、凸、路径插补等)或工艺功能(如凸轮控制器、温度或压力控制)。SIMOTIOND中集成有符合IEC61131-3的PLC,这意味着该系统不仅能够控制运动序列,而且还可控制包括HMI及I/O的整台机器。的开环和闭环控制功能与驱动对象相关的输入和输出变量的时间特性可通过集成的轨迹功能进行测量,并通过STARTER调试工具进行显示。轨迹可同时记录*多4个信号。一个记录可通过自由选择边界条件来触发,例如,通过一个输入或输出变量的值来触发。基本定位器功能模块(EPos)基本定位器“Epos"可作为一个另外激活的功能模块在所有SINAMICSS120控制单元上调 基本定位器可用于解决基本运动控制任务,无需使用一个外部控制器。集成功能,用于带电机编码器或机器编码器的直线和旋转轴的及相对定位。SINAMICSS120驱动系统中的Epo基本定位器提供了强大、精准的定位功能。由于其灵活性和自适应性,基本定位器可用于一系列定位任务中。这些功能无论是在调试还是操作时都易于处理,并且综合监控功能十。在不使用外部位置控制器的情况下,可以实现许多应用。Epo基本定位器用于在/相对定位条件下定位带有旋转以及线性电机编码器或机器编码器(间接或直接测量系统)的线性或旋转轴(模数)。Epo是一个功能模块,其可在伺服控制或向量控制中激活。用户友好的组态和调试,包括控制面板(通过PC操作)和带有STARTER调试工具的诊断功。
理的结构型式PLC主要有整体式和模块式两种结构型式。整体式PLC的每一个I/O点的平均价格比模块式的便宜,且体积相对较小,一般用于系统工艺过程较为固定的小型控制系统中;而模块式PLC的功能扩展灵活方便,在I/O点数、输入点数与输出点数的比例、I/O模块的种类等方面选择余地大,且维修方便,一般于较复杂的控制系统。安装方式的选择PLC系统的安装方式分为集中式、远程I/O式以及多台PLC联网的分布式。集中式不需要设置驱动远程I/O硬件,系统反应快、成本低;远程I/O式适用于大型系统,系统的装置分布范围很广,远程I/O可以分散安装在现场装置附近,连线短,但需要增设驱动器和远程I/O电源;多台PLC联网的分布式适用于多台设备分别独立控制,又要相互联系的场合,可以选用小型PLC,但必须要附加通讯模。
相应的功能要求一般小型(低档)PLC具有逻辑运算、定时、计数等功能,对于只需要开关量控制的设备都可满足。对于以开关量控制为主,带少量模拟量控制的系统,可选用能带A/D和D/A转换单元,具有加减算术运算、数据传送功能的增强型低档PLC。对于控制较复杂,要求实现PID运算、闭环控制、通信联网等功能,可视控制规模大小及复杂程度,选用中档或高档PLC。但是中、高档PLC价格较贵,一般用于大规模过程控制和集散控制系统等场合。响应速度要求PLC是为工业自动化设计的通用控制器,不同档次PLC的响应速度一般都能满足其应用范围内的需要。如果要跨范围使用PLC,或者某些功能或信号有特殊的速度要求时,则应该慎重考虑PLC的响应速度,可选用具有高速I/O处理功能的PLC,或选用具有快速响应模块和中断输入模块的PLC
3. 在WinLC RTX中新建Data Type(UDT1),参照上述WinCC帮助文件中数据块的架构和参数介绍,定义过程变量的结构,如图5所示。
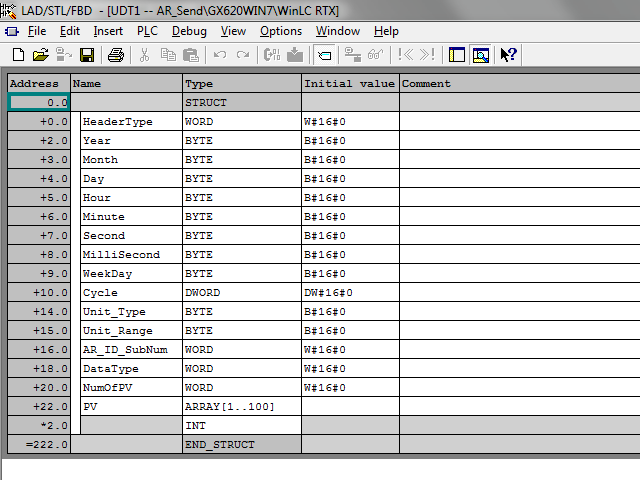
图5
4. 在WinLC RTX中新建Data Block(DB1),定义数组,类型选择UDT1,如图6所示。
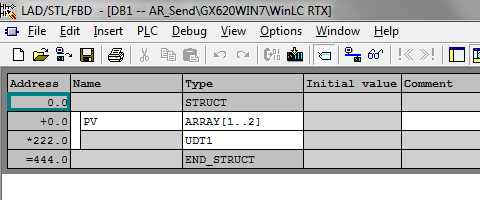
图6
5. 参照上述WinCC帮助文件中AR_SEND的变量属性,为DB1的数组PV分配如下相应的初始值:
PV(1).HeaderType=9
PV(1).Cycle=10
PV(1).Unit_Type=1
PV(1).Unit_Range=3
PV(1).AR_ID_SubNum=1
PV(1).DataType=2
PV(1).NumOfPV=100
PV(2)的初始值和PV(1)基本相同,注意PV(1).AR_ID_SubNum=2。
6. 在WinLC RTX中新建Function Block(FB1),在Interface-IN中新建输入参数AR_Send,选择Data Type为AR_Send,调用SFB37(AR_SEND)发送DB1,如图7所示。
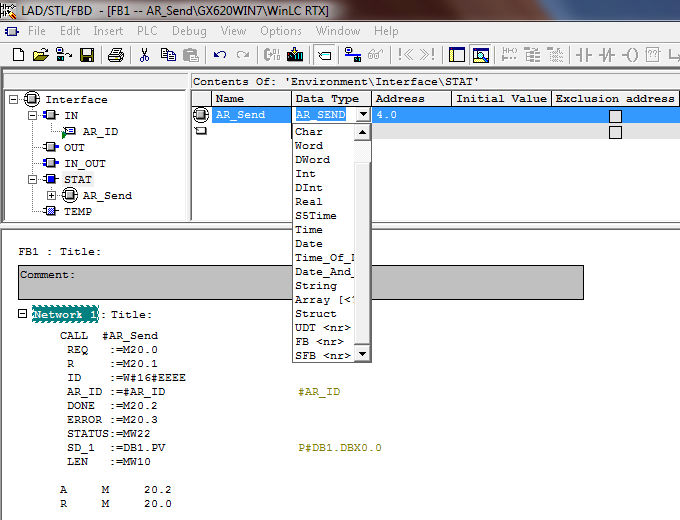
图7
7. 在WinLC RTX中新建Fucntion(FC1),调用FB1,并调用SFC1(READ_CLK)读取当前系统时间并写入DB1,如图8所示。
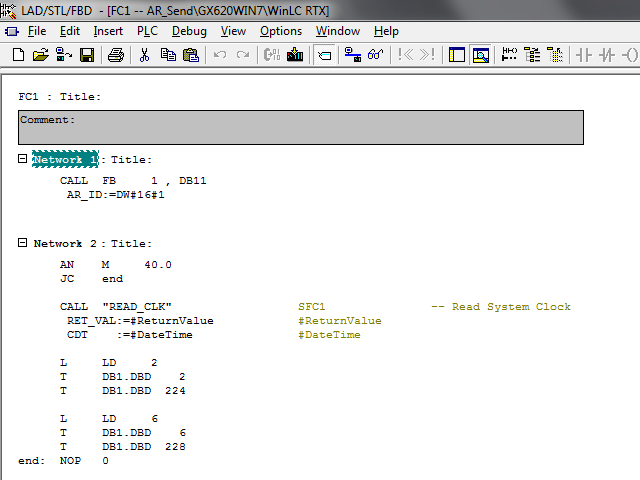
图8
8. 在WinLC RTX中新建Function(FC3),SFB37(SAR_Send)发送的数据包长度,如图9所示。
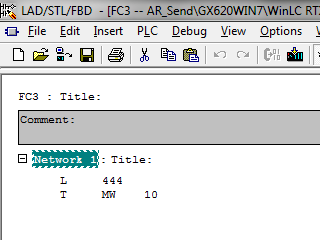
图9
9. 在WinLC RTX中新建Organization Block(OB100),调用FC3。
10. 在WinLC RTX中的OB1中调用FC1。
11. 选择菜单Options-'Compile Multiple OSs' Wizard-Start,编译AS-OS,如图10、图11所示。
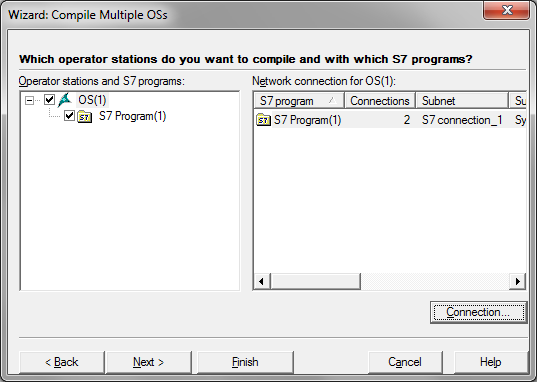
图10
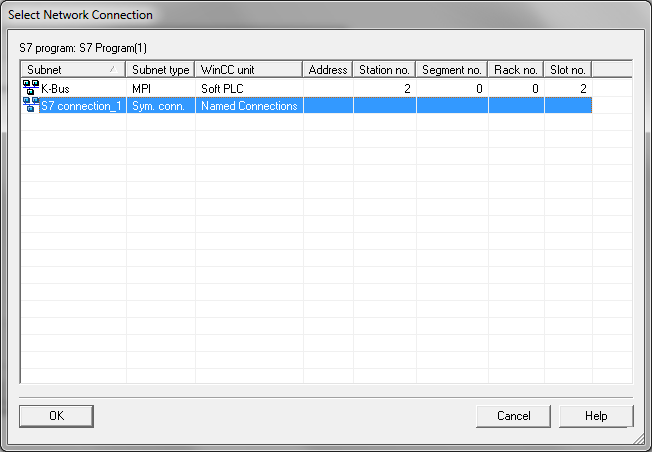
图11
电气原理图目的是便于阅读和分析控制线路,应根据结构简单、层次分明清晰的原则,采用电器元件展开形式绘制。它包括所有电器元件的导电部件和接线端子,但并不按照电器元件的实际布置位置来绘制,也不反映电器元件的实际大小。
1、为了区别主电路与控制电路,在绘线路图时主电路(电机、电器及连接线等),用粗线表示,而控制电路(电器及连接线等)用细线表示。通常习惯将主电路放在线路图的左边(或上部),而将控制电路放在右边(或下部)。
2、动力电路、控制电路和信号电路应分别绘出:
动力电路——电源电路绘水平线;受电的动力设备(如电动机等)及其它保护电器支路,应垂直电源电路画出。
控制电路和信号电路——应垂直地绘于两条水平电源线之间,耗能元件(如线圈、电磁铁,信号灯等)应直接连接在接地或下方的水平电源线上,控制触头连接在上方水平线与耗能元件之间。
3、在原理图中各个电器并不按照它实际的布置情况绘在线路上,而是采用同一电器的各部件分别绘在它们完成作用的地方。
4、为区别控制线路中各电器的类型和作用,每个电器及它们的部件用一定的图形符号表示,且给每个电器有一个文字符号,属于同一个电器的各个部件(如接触器的线圈和触头)都用同一个文字符号表示。而作用相同的电器都用一定的数字序号表示。
5、因为各个电器在不同的工作阶段分别作不同的动作,触点时闭时开,而在原理图内只能表示一种情况,因此,规定所有电器的触点均表示正常位置,即各种电器在线圈没有通电或机械尚未动作时的位置。如对于接触器和电磁式继电器为电磁铁未吸上的位置,对于行程开关、按钮等则为未压合的位置。
6、为了查线方便。在原理图中两条以上导线的电气连接处要打一圆点,且每个接点要标一个编号,编号的原则是:靠近左边电源线的用单数标注,靠近右边电源线的用双数标注,通常都是以电器的线圈或电阻作为单、双数的分界线,故电器的线圈或电阻应尽量放在各行的-边(左边或右边)。
7、对具有循环运动的机构,应给出工作循环图,**转换开关和行程开关应绘出动作程序和动作位置
8、原理图应标出下列数据或说明:
①各电源电路的电压值,极性或频率及相数。
②某些元器件的特性(如电阻,电容器的参数值等);
③不常用的电器(如位置传感器,手动触头,电磁阀门或气动阀,定时器等)的操作方法和功能
