西门子电机6SL3120-1TE28-5AA3详细说明
矢量控制(VC)方式
矢量控制变频调速的做法是将异步电动机在三相坐标系下的定子电流Ia、Ib、Ic、通过三相-二相变换,等效成两相静止坐标系下的交流电流Ia1Ib1,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流Im1、It1(Im1相当于直流电动机的励磁电流;It1相当于与转矩成正比的电枢电流),然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标反变换,实现对异步电动机的控制。其实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。矢量控制方法的提出具有划时代的意义。然而在实际应用中,由于转子磁链难以准确观测,系统特性受电动机参数的影响较大,且在等效直流电动机控制过程中所用矢量旋转变换较复杂,使得实际的控制效果难以达到理想分析的结果。
直接转矩控制(DTC)方式
1985年,德国鲁尔大学的DePenbrock教授*提出了直接转矩控制变频技术。该技术在很大程度上解决了上述矢量控制的不足,并以新颖的控制思想、简洁明了的系统结构、优良的动静态性能得到了迅速发展。目前,该技术已成功地应用在电力机车牵引的大功率交流传动上。 直接转矩控制直接在定子坐标系下分析交流电动机的数学模型,控制电动机的磁链和转矩。它不需要将交流电动机等效为直流电动机,因而省去了矢量旋转变换中的许多复杂计算;它不需要模仿直流电动机的控制,也不需要为解耦而简化交流电动机的数学模型。
矩阵式交—交控制方式
VVVF变频、矢量控制变频、直接转矩控制变频都是交—直—交变频中的一种。其共同缺点是输入功率因数低,谐波电流大,直流电路需要大的储能电容,再生能量又不能反馈回电网,即不能进行四象限运行。为此,矩阵式交—交变频应运而生。由于矩阵式交—交变频省去了中间直流环节,从而省去了体积大、价格贵的电解电容。它能实现功率因数为l,输入电流为正弦且能四象限运行,系统的功率密度大。该技术目前虽尚未成熟,但仍吸引着众多的学者深入研究。其实质不是间接的控制电流、磁链等量,而是把转矩直接作为被控制量来实现的。具体方法是:
——控制定子磁链引入定子磁链观测器,实现无速度传感器方式;
——自动识别(ID)依靠的电机数学模型,对电机参数自动识别;
——算出实际值对应定子阻抗、互感、磁饱和因素、惯量等算出实际的转矩、定子磁链、转子速度进行实时控制;
——实现Band—Band控制按磁链和转矩的Band—Band控制产生PWM信号,对逆变器开关状态进行控制。
矩阵式交—交变频具有快速的转矩响应(<2ms),很高的速度精度(±2%,无PG反馈),高转矩精度(<+3%);同时还具有较高的起动转矩及高转矩精度,尤其在低速时(包括0速度时),可输出150%~200%转矩
配置中央机架和扩展机架
中央机架中带有CPU模块,通过接口模块可以进行机架的扩展,扩展机架上不能插入CPU模块。根据不同的扩展接口,有的扩展机架上带有通信总线可以插入通信模块CP及功能模块FM,不带有通信总线的扩展机架上只能插入I/O模块(支持IO总线的CP、FM除外)。
3.2.1配置S7-300 PLC中央机架
配置S7-300中央机架,必须遵循以下规则:
1. 1号槽只能放置电源模块,由于电源模块不带有背板总线接口,可以不进行硬件配置。
2. 2号槽只能放置CPU模块,不能为空。
3. 3号槽只能放置接口模块,如果一个S7-300 PLC站只有主机架,而没有扩展机架,则 主机架不需要配置接口模块,但是3号槽必须预留(实际的硬件排列仍然是连续的)。
4. 由于机架不带有源背板总线,相邻模块间不能有空槽位。
数字仿真模块SIM 374 IN/OUT 16专用于实验测试使用,不能连接实际的输入、输出设备,在硬件目录里并不存在。因此在配置该模块时,应该添加需要仿真的模块,如6ES7 323-1BH01-0AA0,而不是该模块本身。
6.4-11号槽可放置多8个信号模块、功能模块或通信处理器,与模块的宽窄无关。如 果需要配置更多的模块则需要进行机架扩展或者使用分布式IO。
使用TIA博途进行硬件配置的过程与硬件实际安装过程相同,在项目中插入一个新设备选择"SIMATIC S7-300",这里选择CPU315-2PN/DP,然后选择设备视图进入硬件配置界面。此时,CPU和机架已经出现在设备视图中。在硬件目录中,使用鼠标双击或拖拽的方法添加模块到机架上,配置的机架中带有11个槽位,按实际需求及配置规则将硬件分别插入到相应的槽位中,如图3-3所示。硬件组态遵循所见即所得的原则,当用户在计算机组态界面中将视图放大后,可以发现此界面与实物基本相同。注意硬件配置中没有3号槽,该槽被自动隐藏,可以点击2号槽和4号槽之间的 ,隐藏和打开3号槽。点击工具栏上的

按钮,用于显示模块的标签,包括导轨以及模块的名称。
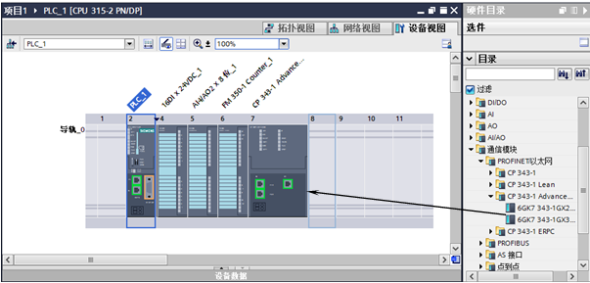
图 3-3 插入S7-300 PLC模块
由于与早期的STEP7组态方式有所不同,在早期的STEP7项目组态中,在添加一个站点的硬件组态中可以添加机架、电源、CPU等,而在TIA博途中添加一个站点时首先需要选择CPU,因此机架将自动添加到设备中,此时也可以更改CPU类型,如图3-3所示,在2号槽可以对选择的CPU进行替换,先选择需要插入的槽号,再双击选择的CPU或使用鼠标将选择的CPU拖放到相应的槽位中。在添加CPU时,需要注意CPU的型号和固件版本都要与实际硬件一致,一般情况下,添加CPU的固件版本都是的,可以在硬件目录选择相应的CPU,在设备信息中更改组态CPU的固件版本,如图3-4所示。插入其他模块例如功能模块、通信处理器等,同样需要注意模块的型号和固件版本,更改组态的固件版本与CPU的方法相同。
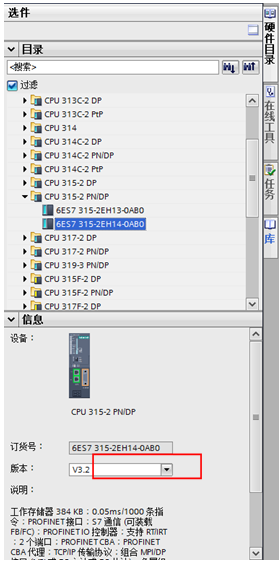
图 3-4 修改CPU固件版本
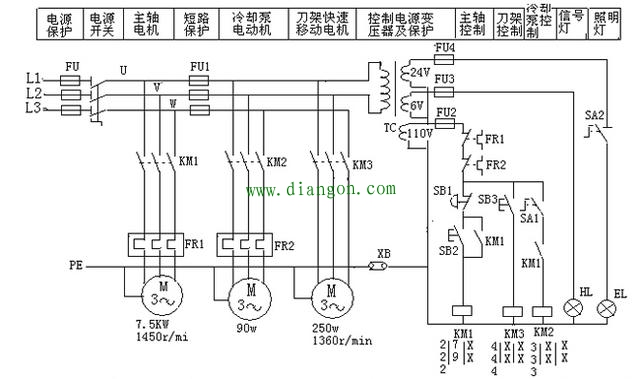
1、看图样说明 图1 CA6140型车床电路图 |