

西门子模块6SL3000-0CE23-6AA0详细说明
串口通信基本接线方法
目前较为常用的串口有9针串口(DB9)和25针串口(DB25),通信距离较近时(<12m),可以用电缆线直接连接标准RS232端口(RS422,RS485较远),若距离较远,需附加调制解调器(MODEM)。*为简单且常用的是三线制接法,即地、接收数据和发送数据三脚相连,本文只涉及到*为基本的接法,且直接用RS232相连。
1.DB9和DB25的常用信号脚说明
9针串口(DB9) 25针串口(DB25)
针号 功能说明 缩写 针号 功能说明 缩写
1 数据载波检测 DCD 8 数据载波检测 DCD
2 接收数据 RXD 3 接收数据 RXD
3 发送数据 TXD 2 发送数据 TXD
4 数据终端准备 DTR 20 数据终端准备 DTR
5 信号地 GND 7 信号地 GND
6 数据设备准备好 DSR 6 数据准备好 DSR
7 请求发送 RTS 4 请求发送 RTS
8 清除发送 CTS 5 清除发送 CTS
9 振铃指示 DELL 22 振铃指示 DELL
2.RS232C串口通信接线方法(三线制)
首先,串口传输数据只要有接收数据针脚和发送针脚就能实现:同一个串口的接收脚和发送脚直接用线相连,两个串口相连或一个串口和多个串口相连
· 同一个串口的接收脚和发送脚直接用线相连 对9针串口和25针串口,均是2与3直接相连;
· 两个不同串口(不论是同一台计算机的两个串口或分别是不同计算机的串口)
上面表格是对微机标准串行口而言的,还有许多非标准设备,如接收GPS数据或电子罗盘数据,只要记住一个原则:接收数据针脚(或线)与发送数据针脚(或线)相连,彼此交叉,信号地对应相接,就能百战百胜。
3.串口调试中要注意的几点:
串口调试时,准备一个好用的调试工具,如串口调试助手、串口精灵等,有事半功倍之效果; 强烈建议不要带电插拨串口,插拨时至少有一端是断电的,否则串口易损坏。
单工、半双工和全双工的定义
如果在通信过程的任意时刻,信息只能由一方A传到另一方B,则称为单工。
如果在任意时刻,信息既可由A传到B,又能由B传A,但只能由一个方向上的传输存在,称为半双工传输。
如果在任意时刻,线路上存在A到B和B到A的双向信号传输,则称为全双工。
电话线就是二线全双工信道。 由于采用了回波抵消技术,双向的传输信号不致混淆不清。双工信道有时也将收、发信道分开,采用分离的线路或频带传输相反方向的信号,如回线传输。
奇偶校验
串行数据在传输过程中,由于干扰可能引起信息的出错,例如,传输字符‘E’,其各位为:
0100,0101=45H
D7 D0
由于干扰,可能使位变为1,这种情况,我们称为出现了“误码"。我们把如何发现传输中的错误,叫“检错"。发现错误后,如何消除错误,叫“纠错"。
的检错方法是“奇偶校验",即在传送字符的各位之外,再传送1位奇/偶校验位。可采用奇校验或偶校验。
奇校验:所有传送的数位(含字符的各数位和校验位)中,“1"的个数为奇数,如:
1 0110,0101
0 0110,0001
偶校验:所有传送的数位(含字符的各数位和校验位)中,“1"的个数为偶数,如:
1 0100,0101
0 0100,0001
奇偶校验能够检测出信息传输过程中的部分误码(1位误码能检出,2位及2位以上误码不能检出),同时,它不能纠错。在发现错误后,只能要求重发。但由于其实现简单,仍得到了广泛使用。
有些检错方法,具有自动纠错能力。如循环冗余码(CRC)检错等。
串口通讯流控制
我们在串行通讯处理中,常常看到RTS/CTS和XON/XOFF这两个选项,这就是两个流控制的选项,目前流控制主要应用于调制解调器的数据通讯中,但对普通RS232编程,了解一点这方面的知识是有好处的。那么,流控制在串行通讯中有何作用,在编制串行通讯程序怎样应用呢?这里我们就来谈谈这个问题。
1.流控制在串行通讯中的作用
这里讲到的“流",当然指的是数据流。数据在两个串口之间传输时,常常会出现丢失数据的现象,或者两台计算机的处理速度不同,如台式机与单片机之间的通讯,接收端数据缓冲区已满,则此时继续发送来的数据就会丢失。现在我们在网络上通过MODEM进行数据传输,这个问题就尤为突出。流控制能解决这个问题,当接收端数据处理不过来时,就发出“不再接收"的信号,发送端就停止发送,直到收到“可以继续发送"的信号再发送数据。因此流控制可以控制数据传输的进程,防止数据的丢失。 PC机中常用的两种流控制是硬件流控制(包括RTS/CTS、DTR/CTS等)和软件流控制XON/XOFF(继续/停止),下面分别说明。
2.硬件流控制
硬件流控制常用的有RTS/CTS流控制和DTR/DSR(数据终端就绪/数据设置就绪)流控制。
硬件流控制必须将相应的电缆线连上,用RTS/CTS(请求发送/清除发送)流控制时,应将通讯两端的RTS、CTS线对应相连,数据终端设备(如计算机)使用RTS来起始调制解调器或其它数据通讯设备的数据流,而数据通讯设备(如调制解调器)则用CTS来起动和暂停来自计算机的数据流。这种硬件握手方式的过程为:我们在编程时根据接收端缓冲区大小设置一个高位标志(可为缓冲区大小的75%)和一个低位标志(可为缓冲区大小的25%),当缓冲区内数据量达到高位时,我们在接收端将CTS线置低电平(送逻辑0),当发送端的程序检测到CTS为低后,就停止发送数据,直到接收端缓冲区的数据量低于低位而将CTS置高电平。RTS则用来标明接收设备有没有准备好接收数据。
常用的流控制还有还有DTR/DSR(数据终端就绪/数据设置就绪)。我们在此不再详述。由于流控制的多样性,我个人认为,当软件里用了流控制时,应做详细的说明,如何接线,如何应用。
3.软件流控制
由于电缆线的限制,我们在普通的控制通讯中一般不用硬件流控制,而用软件流控制。一般通过XON/XOFF来实现软件流控制。常用方法是:当接收端的输入缓冲区内数据量超过设定的高位时,就向数据发送端发出XOFF字符(十进制的19或Control-S,设备编程说明书应该有详细阐述),发送端收到XOFF字符后就立即停止发送数据;当接收端的输入缓冲区内数据量低于设定的低位时,就向数据发送端发出XON字符(十进制的17或Control-Q),发送端收到XON字符后就立即开始发送数据。一般可以从设备配套源程序中找到发送的是什么字符。
应该注意,若传输的是二进制数据,标志字符也有可能在数据流中出现而引起误操作,这是软件流控制的缺陷,而硬件流控制不会有这个问题
Delphi是一种具有功能强大、简便易用和代码执行速度快等优点的可视化快速应用开发工具,它在构架企业信息系统方面发挥着越来越重要的作用,许多程序员愿意选择 Delphi作为开发工具编制各种应用程序。但是,美中不足之处是 Delphi没有自带的串口通信控件,在它的帮助文档里也没有提及串口通信,这就给编制通信程序的开发人员带来许多不便。
目前,利用 Delphi实现串口通信的常用的方法有 3种:一是利用控件,如 MSCOMM控件和 SPCOMM控件;二是使用 API函数;三是调用其他串口通信程序。其中利用 API编写串口通信程序较为复杂,需要掌握大量的通信知识。相比较而言,利用 SPCOMM控件则相对较简单,并且该控件具有丰富的与串口通信密切相关的属性及事件,提供了对串口的各种操作,而且还支持多线程。下面本文结合实例详细介绍 SPCOMM控件的使用。
SPCOMM的安装
1.选择下拉菜单 Component中的 Install Component选项,弹出如图 1所示的窗口。

在 Unit file name处填写 SPCOMM控件所在的路径,其他各项可用默认值,点击 OK按钮。
2.安装后,在 System控件面板中将出现一个红色控件 COM。现在就可以像 Delphi自带控件一样使用 COM控件了。
SPCOMM的属性、方法和事件
1.属性
●CommName:表示 COM1、 COM2等串口的名字;
●BaudRate:根据实际需要设定的波特率,在串口打开后也可更改此值,实际波特率随之更改;
●ParityCheck:表示是否需要奇偶校验;
●ByteSize:根据实际情况设定的字节长度;
●Parity:奇偶校验位;
●StopBits:停止位;
●SendDataEmpty:这是一个布尔型属性,为 true时表示发送缓存为空,或者发送队列里没有信息;为 false时表示发送缓存不为空,或者发送队列里有信息。
2.方法
●Startcomm方法用于打开串口,当打开失败时通常会报错。错误主要有 7种:⑴串口已经打开;⑵打开串口错误;⑶文件句柄不是通信句柄;⑷不能够安装通信缓存;⑸不能产生事件;⑹不能产生读进程;⑺不能产生写进程;
●StopComm方法用于关闭串口,没有返回值;
●WriteCommData(pDataToWrite: PChar;dwSizeofDataToWrite:Word )方法是个带有布尔型返回值的函数,用于将一个字符串发送到写进程,发送成功返回 true,发送失败返回 false。执行此函数将立即得到返回值,发送操作随后执行。该函数有两个参数,其中 pDataToWrite是要发送的字符串, dwSizeofDataToWrite是发送字符串的长度。
3.事件
●OnReceiveData :procedure (Sender: Tbbbbbb;Buffer: Pointer;BufferLength: Word) of bbbbbb
当有数据输入缓存时将触发该事件,在这里可以对从串口收到的数据进行处理。 Buffer中是收到的数据, BufferLength是收到的数据长度。
●OnReceiveError : procedure(Sender: Tbbbbbb; EventMask : DWORD)
当接收数据出现错误时将触发该事件
单相电容式电动机有一下几种情况:
一、启动,运行绕组参数都是一样单相电动机(如洗衣机电机)
二、单电容单相电动机(如小于550W电动机)
三、双电容单相电动机(大于750W电动机)
现在我就来具体分享一下具体的单相电动机接触器控制的正反转电路图。(电脑坏了,我就用手绘图纸)
一、主副绕组参数一样的单相电动机,接线如下图:
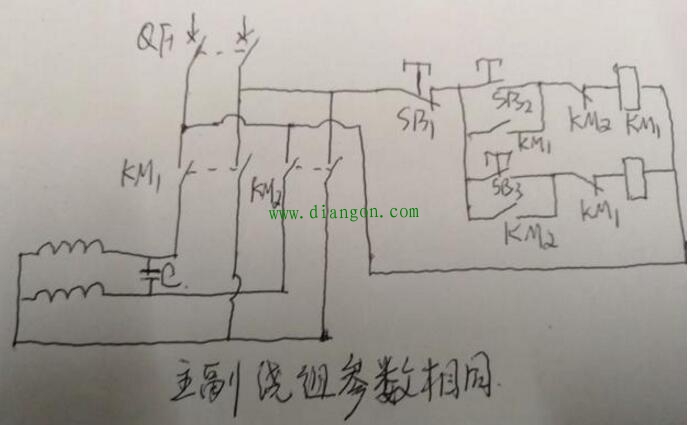
电路工作原理是,按下正转启动按钮SB2电源通过停止按钮SB1到SB2到接触器KM2的常闭互锁触头,使接触器KM1线圈通电吸合,并经过KM1常开辅助触头自锁,使电动机连续运行;按下停止按钮,控制线路断电,电动机停止运行。反转的工作原理同正转一样,这里不在重复叙述。接触器的主触头,通过KM1和KM2接触器的投入,使电动机的两个绕组相对变换为,主绕组和副绕组。(只有两个绕组参数一样的单相电容式电动机才可以这样接线)
二、单电容电动机正反转交流接触器控制线路图:
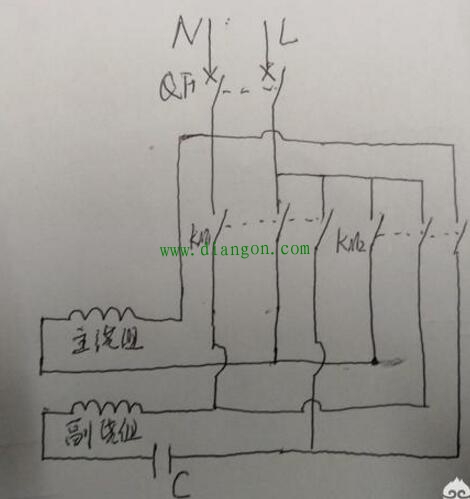
由于接触器只有三个主触头,故只能够把主绕组的零线,直接接到主绕组的一个接线端子上面,通过接触器的主触头,把副绕组的极性转换接法,这样就取得了正反转的效果,它的控制线路如上图的控制部分是一样的,所以没有画出来。
三、双电容正反转单相电动机接触器控制线路图
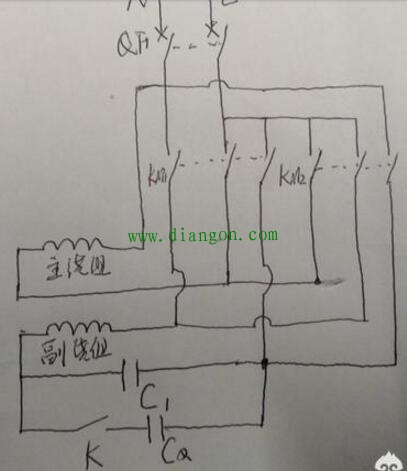
双电容单相电动机和单电容电动机的主触头接线方法一样,只不过是,多了一个离心开关K而已,在单相电动机启动结束后通过离心开关切除投入状态,电动机单电容运行
