

商洛西门子(中国)授权总代理商
西门子S7-200PLC的计数器共有255个计数器(不包括高速计数器)可以使用,计数的形式可以分为“加计数”、“减计数”与“加减计数”3类。
(1)加计数(CTU)
加计数是通过获取计数输入信号的上升沿进行加法计数的计数方法。计数输入信号每出现一次上升沿,计数器从0开始加“1”,当计数达到设定值(PV)时,计数器的输出触点接通。
计数达到设定值如果继续输入计数信号,计数值仍然增加,输出触点保持接通状态。
计数器具有清除信号(R)输入,当清除信号为“1”时,现行计数值被清“0”,设定值写入,输出触点强制断开。
(2)减计数(CTD)
减计数是通过获取计数输入信号的上升沿进行减法计数的计数方法。计数输入信号每出现一次上升沿,计数器从设定值开始减“l”,当现行计数值减到“0”时,计数器的输出触点接通。
计数值为“0”后如果继续输入计数信号,计数值保持“0”,输出触点保持接通状态。
计数器具有清除信号(R)输入,当清除信号为“1”时,设定值被写入并作为现行计数值,输出触点强制断开。
(3)加减计数(CTUD)
加减计数具有加计数与减计数两个输入端,通过获取对应计数输入信号的上升沿,进行加法、减法计数。
加减计数的本质与加计数相同,计数输入信号每出现一次上升沿,计数器从0开始加“1”,当计数达到设定值(PV)时,计数器的输出触点接通。计数达到设定值如果继续输入计数信号,计数值仍然增加,输出触点保持接通状态。当现行值加到*大值32767后,如果再输入加计数信号,现行值变为-32768,再继续进行加计数。
同时,减计数输入信号也起作用,减计数输入每出现一次上升沿,计数器从现行值开始减“1”。当现行值减到*小值-32768后,如果再输入减计数信号,现行值变为+32767,再继续进行减计数。
计数器具有清除信号(R)输入,当清除信号为“l”时,现行计数值被清“0”,设定值写入,输出触点强制断开。
1.软件应用窗
S7-PLCSIM仿真软件可以在SIMATIC管理器中,执行菜单命令“Options”一“Simulate Modes”或点击“仿真打开/关闭(Simulate ON/OFF)”按钮打开。
打开后的软件应用窗口如图14-4.1所示。
2.CPU模拟面板
S7-PLCSIM仿真软件打开后,软件应用窗初始操作界面中有一个CPU 300/400控制面板模拟窗口(以下称“模拟面板”,见图14-4.1),它用来模拟实际PLC的CPU控制面板。

与实际PLC -样,“模拟面板”布置有SF、DP、DC、RUN、STOP等5个状态指示灯和RUN-P、RUN、STOP等3个CPU工作模式转换开关,“模拟面板”上的“MRES”按钮可以用来清除存储器、删除块和仿真PLC中的硬件设置。
5个状态指示灯(LED)的作用与实际PLC -样,具体如下:
SF:表示软硬件错误:
DP:指示PLC与分布式外设或远程I/O的通信状态;
DC: PLC电源指示;
RUN与STOP:分别表示PLC的运行和停止状态。
S7-PLCSIM应用窗口一经打开,S7-PLCSIM中的仿真CPU与STEP 7之间的连接即被自动建立。因此,仿真PLC的CPU电源始终处于接通状态,CPU处于停止(STOP)模式,用户程序的扫描方式默认为“连续”扫描。
西门子S7-300和S7-400PLC中“暖启动”、“冷启动”和“热启动”启动类型之间互有区别:
●在暖启动中,从程序开始处以系统数据和用户地址区的初始设置开始进行程序处理(非保持性定时器、计数器和位存储器复位)。保持的标志存储器、定时器和计数器以及数据块的当前值保持(仅当有后备电池,如果使用EPROM并且CPU的保持特性已赋参数时S7-300甚至可以没有后备电池)。OB100中的程序执行一次然后循环程序开始执行。S7-300只有暖启动,对于S7-300而已,重新上电以及将模式开关从STOP拨到RUN都是暖启动。
●在冷启动中,执行OB1中的*个命令时,读取过程映像输入表,并处理STEP7用户程序(也适用于暖启动)。删除工作存储器中由SFC创建的数据块;剩余的数据块具有来自装入存储器的预置值。复位过程映像和所有定时器、计数器和位存储器,不管它们是否具有保持性分配。OB102中的程序执行一次然后循环程序开始执行。
●在热启动中,在程序中断处重新开始执行程序(不复位定时器、计数器和位存储器)。在启动时所有数据(标志存储器、定时器、计数器、过程映像及数据块的当前值)被保持,OB101中的程序执行一次。然后程序从断点处(断电,CPUSTOP)恢复执行。这个“剩余循环”执行完后,循环程序开始执行。只有S7-400CPU中才能进行热启。
要用好PID调节,搞清楚PID的计算公式和PID参数的意义是很有必要的。下面是PID的公式:
![]()
式中误差信号e(t) = SP(t) – PV(t),M(t)是PID控制器的输出值,Kc是控制器的增益(比例系数),Ti和Td分别是积分时间和微分时间,Minitial是M(t)的初始值,实际上是积分的初始值。
PID公式的前3项分别与误差、误差的积分和误差的导数成正比。
微分、积分是高等数学的概念,建议没有学过高等数学的网友至少要搞清楚微分和积分的几何意义,这对深入理解PID参数的意义有很大的帮助。
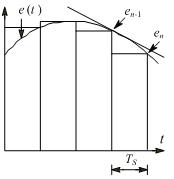
积分对应于下图中误差曲线e(t) 与坐标轴包围的面积(图中的灰色部分)。PID程序是周期性执行的,执行PID程序的时间间隔为Ts(即PID控制的采样周期)。我们只能使用连续的误差曲线上间隔时间为Ts的一些离散的点的值来计算积分,因此不可能计算出准确的积分值,只能对积分作近似计算。
一般用下图中的矩形面积之和来近似**积分。当Ts较小时,积分的误差不大。

在误差曲线e(t)上作一条切线(见下图),该切线与x轴正方向的夹角α的正切值tgα即为该点处误差的一阶导数de(t)/dt。PID控制器输出表达式中的导数用下式来近似:
de(t)/ dt ≈ Δe(t)/Δt = [e(n) - e(n-1)]/Ts,式中e(n)是第n次采样时的误差值,e(n-1)是第n-1次采样时的误差值。
PID调节是目前应用*广泛调节控制规律,P比例、I积分、D微分控制,简称PID控制。
比例控制是一种*简单的控制方式。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节可以使系统消除稳态误差。系统如果在进入稳态后存在稳态误差,就必须引入“积分项”。比例+积分(PI)控制可以使系统在进入稳态后无稳态误差。
微分作用能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。因此,可以改善系统的动态性能。。对有较大惯性或滞后的被控对象,比例+微分(PD)控制能改善系统在调节过程中的动态特性。
这是摘录的一个PID参数调整的口诀,以供大家学习参考:
参数整定找**,从小到大顺序查
先是比例后积分,*后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低。
这个顺口溜流传甚广,我觉得可操作性很低(也可能是我的悟性不够),我有很多疑问:
“从小到大顺序查“,查什么?
一定要”先是比例后积分“吗?直接用PI不好吗?
“曲线振荡很频繁”,是指振荡频率高还是振荡次数多?
什么是”比例度盘“?
”曲线漂浮绕大湾“什么意思?是指超调量大吗?还是上升缓慢?
”曲线波动周期长“的周期是震荡周期吗?还是过度过程时间长?
振荡频率和微分关系大吗?微分的主要作用是什么?
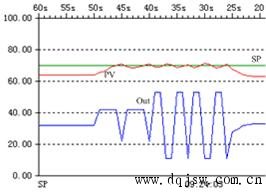
“理想曲线两个波”,一个波是180度还是360度?两个波是理想曲线,下图的PV曲线理不理想?

我用过S7-200和S7-200 SMART的PID调节控制面板和PID参数自整定功能,被控制对象采用我编写的子程序来模拟。被控对象的参数如下:增益为3.0,两个惯性环节的时间常数为5s和2s。
下面是自整定之前的曲线,超调量太大:

下面是整定过程的曲线:
下面是整定得到的参数的曲线:
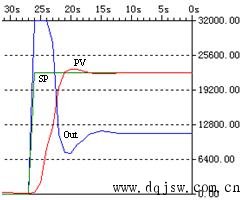
下面是另一组整定前的参数的曲线,过程变量PV曲线上升太慢:

虽然整定前两组PID参数相差很远,两次整定后得到PID参数差不多,使用整定得到的PID参数的曲线形状也差不多。
我觉得西门子的PID参数自整定是很好用的。
要用好PID调节,搞清楚PID的计算公式和PID参数的意义是很有必要的。下面是PID的公式:
![]()
式中误差信号e(t) = SP(t) – PV(t),M(t)是PID控制器的输出值,Kc是控制器的增益(比例系数),Ti和Td分别是积分时间和微分时间,Minitial是M(t)的初始值,实际上是积分的初始值。
PID公式的前3项分别与误差、误差的积分和误差的导数成正比。
微分、积分是高等数学的概念,建议没有学过高等数学的网友至少要搞清楚微分和积分的几何意义,这对深入理解PID参数的意义有很大的帮助。
积分对应于下图中误差曲线e(t) 与坐标轴包围的面积(图中的灰色部分)。PID程序是周期性执行的,执行PID程序的时间间隔为Ts(即PID控制的采样周期)。我们只能使用连续的误差曲线上间隔时间为Ts的一些离散的点的值来计算积分,因此不可能计算出准确的积分值,只能对积分作近似计算。
一般用下图中的矩形面积之和来近似**积分。当Ts较小时,积分的误差不大。
在误差曲线e(t)上作一条切线(见下图),该切线与x轴正方向的夹角α的正切值tgα即为该点处误差的一阶导数de(t)/dt。PID控制器输出表达式中的导数用下式来近似:
de(t)/ dt ≈ Δe(t)/Δt = [e(n) - e(n-1)]/Ts,式中e(n)是第n次采样时的误差值,e(n-1)是第n-1次采样时的误差值。
1.模糊控制的关键点在于总结大量的实践数据,然后做成黑匣子,看似神秘,实际都是经验参数!
2.模糊控制得到的数据是基于控制设备性能不变的情况下,是较为准确的。一旦使用时间长了,性能有所下降,这些经验参数往往就会有很大的偏颇了。
3.即使是同样型号的不同设备,其所处于的工艺环境,工艺流程,工艺特性的不同,其性能也会有差别,因此不能做到模糊控制中同一数据的重复性使用。
4.模糊控制的理念是很好的,*起码是超前控制,但就目前而言,其实用性,动态性还是不如传统的PID。
5.传统PID是滞后控制,在目前的大多数工艺环境下,还是可以满足控制的需求的。
6.基于传统PID的特点,也延展了不同的控制方式,如串级调节,三冲量调节,分程调节,步进式等等。#p#分页标题#e#
7.个人觉得:随着电子,网络,计算机的飞速发展,传统PID的滞后也会改善的更好,其动态调节特性是模糊控制所不能比拟的。
搞清楚PID参数的物理意义,和PID参数与闭环系统性能指标的关系,对于指导我们调节PID至关重要。
PID的控制原理可以用人对炉温的手动控制来理解。首先看看比例部分的作用。
搞清楚PID参数的物理意义,和PID参数与闭环系统性能指标的关系,对于指导我们调节PID至关重要。首先看看比例部分的作用。
PID的控制原理可以用人对炉温的手动控制来理解。操作人员用眼睛读取数字仪表检测到的炉温的测量值,并与炉温的设定值比较,得到温度的误差值。用手操作电位器,调节加热的电流,使炉温保持在设定值附近。
操作人员知道使炉温稳定在设定值时电位器的位置(我们将它称为位置L),并根据当时的温度误差值调整电位器的转角。炉温小于设定值时,在位置L的基础上顺时针增大电位器的转角,以增大加热的电流;炉温大于设定值时,在位置L的基础上反时针减小电位器的转角,以减小加热的电流。令调节后的电位器转角与位置L的差值与误差成正比,误差**值越大,调节的角度越大。上述控制策略就是比例控制。
闭环中存在着各种各样的延迟作用。调节电位器转角后,到温度上升到新的转角对应的稳态值时有较大的延迟。由于延迟因素的存在,调节电位器转角后不能马上看到调节的效果,因此闭环控制系统调节困难的主要原因是系统中的延迟作用。
如果增益太小,调节的力度不够,使温度的变化缓慢,调节时间过长。如果增益过大,调节力度太强,造成调节过头,可能使温度忽高忽低,来回震荡。
如果闭环系统没有积分作用,单纯的比例控制有稳态误差,稳态误差与增益成反比。增益越大,稳态误差越小,但是会使超调量增大,振荡次数增加,甚至会使闭环系统不稳定。因此单纯的比例控制很难兼顾动态性能和静态性能
