

汕尾西门子S7-200代理商
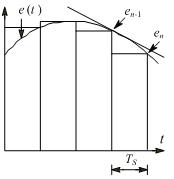
要用好PID调节,搞清楚PID的计算公式和PID参数的意义是很有必要的。下面是PID的公式: |




plc在调试的时候状态指示灯可以帮助我们更快的解决问题,整理一点关于西门子plc的状态指示灯的含义,希望对初学PLC的朋友有一些帮助。 S7200CPU SF 用作系统出错/故障显示,为红色,例如内部错误,用户程序错误(看门狗错误,间接寻址,非法的浮点数,地址范围错等) RUN 绿色,运行模式。 STOP 黄色,停止模式。 DP 分布式I/O,(仅对CPU215)。 S7300CPU SF指示灯 用作系统出错/故障显示,为红色,CPU的硬件出现故障或软件有错,带诊断功能模块出错时点亮。 BATF 为电池故障,红色,电池电压低或没有电池时点亮。 DC5V +5V电源指示,绿色,CPU和S7300总线的5V电源正常时点亮。 FRCE 强制,黄色,至少有一个I/O被强制时点亮。 RUN 运行方式,绿色,CPU处于RUN状态时点亮,重新启动时以2Hz的频率闪亮,保持HOLD状态时以0.5Hz的频率闪亮。 STOP 停止方式,黄色,CPU处于STOP、HOLD状态时或重新启动时常亮,请求存储器复位时以0.5Hz的频率闪亮,正在执行存储器复位时以2Hz的频率闪亮,由于存储器卡插入需要存储器复位时以0.5Hz的频率闪亮。 BUSF 总线错误,红色,PROFIBUS-DP接口硬件或软件故障时点亮,集成有DP口的CPU才有此LED,(如CPU 315-2DP),集成有2个DP口的CPU有两个LED(BUS1F和BUS2F)。 S7400CPU INTF 红色,内部故障,例如用户程序运行超时,用户程序错误。 EXTF 红色,外部故障,例如电源故障,I/O模板故障。 FRCE 黄色,至少有一个I/O被强制时点亮。 RUN 绿色,运行模式。 STOP 黄色,停止模式。 BUS1F 红色,MPI/PROFIBUS-DP接口1的总线故障。 BUS2F 红色,MPI/PROFIBUS-DP接口2的总线故障。 MSTR 黄色,CPU运行。 REDF 红色,冗余错误。 RACK0 黄色,CPU在机架0中。 RACK1 黄色,CPU在机架1中。 IFM1F 红色,接口子模块1故障。 IFM2F 红色,接口子模块2故障。 附: S7400电源模块对供电频率从48Hz-64Hz可以自动调整。 INTF 指示内部故障,如:5V/24V的短路或过载;保持开关放在“0”位置,不允许对外部供电,电池故障。 BAF 电池故障,如果背板总线上的电池电压过低此LED就变亮例如没有装电池; BATT1F/BATT2F 当电池极性接反时,或电池不存在,或电池放电过半时此LED点亮,BATT.INDIC开关用来选择1个电池监视,2个电池监视或不监视电池。 DC5V/DC24V 当5V/24V DC输出电压在允许的范围内时,此LED点亮,当短路或过载后恢复时该LED闪烁 |
- 梅州西门子S7-200代理商 2024-05-08
- 惠州西门子S7-200代理商 2024-05-08
- 肇庆西门子S7-200代理商 2024-05-08
- 茂名西门子S7-200代理商 2024-05-08
- 湛江西门子S7-200代理商 2024-05-08
- 江门西门子S7-200代理商 2024-05-08
- 佛山西门子S7-200代理商 2024-05-08
- 韶关西门子S7-200代理商 2024-05-08
- 汕头西门子S7-200代理商 2024-05-08
- 珠海西门子S7-200代理商 2024-05-08