

烟台西门子S7-200代理商
西门子变频器MicroMaster440是全新一代可以广泛应用的多功能标准变频器。
它采用高性能的矢量控制技术,提供低速高转矩输出和良好的动态特性,同时具备*的过载能力,以满足广泛的应用场合。创新的BiCo(内部功能互联)功能有*的灵活性。
主要特征:
200V-240V ±10%,单相/三相,交流,0.12kW-45kW; 380V-480V±10%,三相,交流,0.37kW-250kW;
矢量控制方式,可构成闭环矢量控制,闭环转矩控制;
高过载能力,内置制动单元;
三组参数切换功能。控制功能: 线性v/f控制,平方v/f控制,可编程多点设定v/f控制,磁通电流控制免测速矢量控制,闭环矢量控制,闭环转矩控制,节能控制模式;
标准参数结构,标准调试软件;
数字量输入6个,模拟量输入2个,模拟量输出2个,继电器输出3个;
独立I/O端子板,方便维护;
采用BiCo技术,实现I/O端口自由连接;
内置PID控制器,参数自整定;
集成RS485通讯接口,可选PROFIBUS-DP/Device-Net通讯模块;
具有15个固定频率,4个跳转频率,可编程;
可实现主/从控制及力矩控制方式;
在电源消失或故障时具有"自动再起动"功能;
灵活的斜坡函数发生器,带有起始段和结束段的平滑特性;
快速电流限制(FCL),防止运行中不应有的跳闸;
有直流制动和复合制动方式提高制动性能。
保护功能:
过载能力为200%额定负载电流,持续时间3秒和150%额定负载电流,持续时间60秒;
过电压、欠电压保护;
变频器、电机过热保护;
接地故障保护,短路保护;
闭锁电机保护,防止失速保护;
采用PIN编号实现参数连锁。
MicroMaster430
西门子变频器MicroMaster430是全新一代标准变频器中的风机和泵类变转矩负载专家。功率范围7.5kW至250kW。它按照要求设计,并使用内部功能互联(BiCo)技术,具有高度可靠性和灵活性。控制软件可以实现功能:多泵切换、手动/自动切换、旁路功能、断带及缺水检测、节能运行方式等。
主要特征:
380V-480V±10%,三相,交流,7.5kW-250kW;
风机和泵类变转矩负载;
牢固的EMC(电磁兼容性)设计;
控制信号的快速响应;
控制功能:
线性v/f控制,并带有增强电机动态响应和控制特性的磁通电流控制(FCC),多点v/f控制;
内置PID控制器;
快速电流限制,防止运行中不应有的跳闸;
数字量输入6个,模拟量输入2个,模拟量输出2个,继电器输出3个;
具有15个固定频率,4个跳转频率,可编程;
采用BiCo技术,实现I/O端口自由连接;
集成RS485通讯接口,可选PROFIBUS-DP通讯模块;
灵活的斜坡函数发生器,可选平滑功能;
三组参数切换功能:电机数据切换,命令数据切换;
风机和泵类功能:
多泵切换;
旁路功能;
手动/自动切换;
断带及缺水检测 ;
节能方式;
保护功能:
过载能力为140%额定负载电流,持续时间3秒和110%额定负载电流,持续时间60秒;
过电压、欠电压保护;
变频器过温保护;
接地故障保护,短路保护;
I2t电动机过热保护;
PTC Y电机保护
实际值:
经滤波的实际值
实际值
来自编码器的实际值
经滤波的速度实际值
CO:被选择的给定值
显示被选择的给定值。
显示下面的给定值:
r1078 总给定值(HSW+ZUSW)
P1058 顺时针点动
P1059 逆时针点动
CO:在转向控制后面的给定值
显示在转向换向功能块后面的给定值(参考值)。
CO:在 RFG 后面的给定值
显示在斜坡函数发生器(RFG)后的总给定值(参考值)(Hz)。
版本 10/06 功 能
MICROMASTER 440 使用说明书 3-85
6SE6400-5AW00-0MP0
3.5.7.21 调试结束
数据从 RAM 传送到 EEPROM 0
0
1 开始 RAM→EEPROM
所有参数变更从 RAM存储器传送到 EEPROM存储器中,因而保存在 MICROMASTER中的一个非易失存
储器中。
说 明
当使用 BOP或 AOP,MICROMASTER时,自动执行从 RAM→EEPROM的数据存储操作。
如果使用调试工具-STARTER或 DriveMonitor-来执行参数设置时,则数据不能自动的存入 EEPROM中。
用有关的选择按键,可选择从 RAM→EEPROM的数据自动存储。
STARTER DriveMonitor
RAM EEPROM Online-EEPROM
说 明
如果 P0971用于启动数据从 RAM→EEPROM的存储时,则在数据已被传送以后,通信存储器再初
始化。这意味着,通过 USS以及通过 CB板的通信在这段时间被中断,它被复位。
¾ 被连接的 PLC(如 STMATIC S7)停止
¾ STARTER启动程序缓冲通信故障
¾ 对于 DriveMonitor启动程序,“NC"(没连接)或“drive busy"被显示。
¾ “busy"正文显示在 BOP操作板上。
在完成复位以后,对于启动程序 STARTER和 DriveMonitor和 BOP操作面板,自动再建立起通信
西门子CPU模块6ES7214-1AG40-0XB0
| L + = 10.8 ... 28.8 V DC | 输入大频率:4Hz | 输入电缆:非屏蔽 大100米 | 继电器输出,每个输出大5A |

图1 DM8 12/24R
2.DM8 24 (4DI/4DO晶体管输出)和DM16 24 (8DI/8DO晶体管输出):
| L + = 20.4 ... 28.8 V DC | 输入大频率:4Hz | 输入电缆:非屏蔽 大100米 | 晶体管输出(24V DC),每个输出大0.3A |


图2 DM8 24 和DM16 24
3.DM8 24R (4DI/4DO继电器输出)和DM16 24R (8DI/8DO继电器输出):| DM8 24R | L = 20.4 ... 26.4 V AC 或者L + = 20.4 ... 28.8 V DC | 输入大频率:4Hz(源型漏型都支持) | 输入电缆:非屏蔽 大100米 | 继电器输出,每个输出大5A |
| DM16 24R | L + = 20.4 ... 28.8 V DC | 输入大频率:4Hz | 输入电缆:非屏蔽 大100米 | 继电器输出,每个输出大5A |


问题:为什么PCS 7项目中OS上显示的当前报警时间和本地时间不一致,例如,计算机时间为14:16,而当前报警时间为22:16,如下图所示,偏差8个小时。该问题是如何造成的,又该如何解决?
回答:在标准的PCS 7项目中,程序产生的报警信息其时间均来自于控制器。如果控制器的时间设置不正确,例如,设置控制器时间时未考虑时区的问题,或者未做自动的时间同步功能,则会出现上述问题。
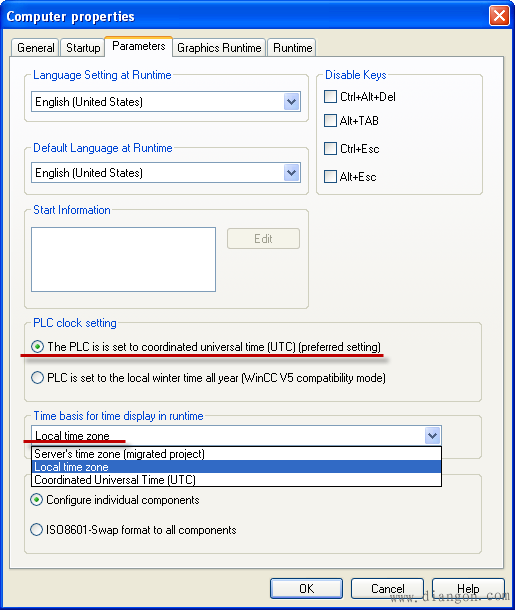
而在WinCC项目的下列计算机属性设置中,其默认控制器的时区为UTC(即GMT)时区,并在本地显示报警的时间时按照本地时区进行转换后显示(归档时仍然按照UTC时区归档)。
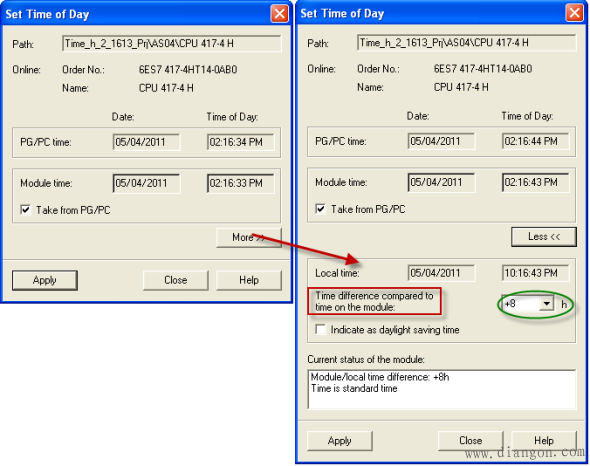
如果我们不考虑控制器和上位机之间的时区偏差问题,简单的设置控制器的时间和本地时间相同。则会有如下问题:例如,当前本地时间为早晨9:00,设置控制器的时间也为早晨9:00。则当前产生的报警时间来自于控制器,其也为早晨9:00,上传至WinCC后,由于WinCC的默认设置中(上图3)认为控制器为UTC时区,且按本地时区进行显示。其将会自动加上本地时区和UTC时区的时间偏差8小时后,进行显示。终显示的报警时间则为9:00+8=17:00点,和当前计算机时间不符。 因此,当通过Simatic manager的plc Set time of day菜单手动对所选择的控制器进行时间设定时,必须注意时区偏差的问题,如下图所示。
在设置模板时间时,需要点击More按钮,加入相应的本地时区时间偏差后(例如,当前计算机设置时区为东八区,则设置时间偏差为+8小时),然后点击apply按钮设置控制器的时间。例如,当前本地计算机时间为早晨9:00(东八区),则控制器的时间应该设置为凌晨1:00才正确(UTC时间 = 当前时间 - 时区偏差)。这样设置后,则不会出现上述的类似问题了。 |


- 东营西门子S7-200代理商 2024-05-08
- 枣庄西门子S7-200代理商 2024-05-08
- 淄博西门子S7-200代理商 2024-05-08
- 青岛西门子S7-200代理商 2024-05-08
- 济南西门子S7-200代理商 2024-05-08
- 山东西门子S7-200代理商 2024-05-08
- 上饶西门子S7-200代理商 2024-05-08
- 抚州西门子S7-200代理商 2024-05-08
- 宜春西门子S7-200代理商 2024-05-08
- 吉安西门子S7-200代理商 2024-05-08